

Методическое пособие 781
.pdfВ некоторых случаях коэффициент k стремятся увеличить. Так, например, если 2 – угол холостого хода, а 1 – угол рабочего хода, то увеличивая k, можно сократить время холостого хода и тем самым увеличить производительность механизма. Поэтому коэффициент k называют иногда коэффициентом производительности механизма.
4.3.4. Синтез шарнирного четырехзвенника по коэффициенту изменения средней скорости коромысла
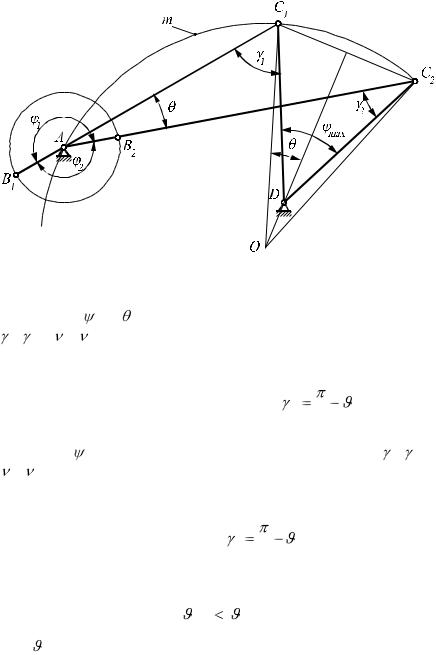
Пусть необходимо спроектировать кинематическую схему механизма шарнирного четырехзвенника по заданному коэффициенту k. Для этого, задавшись длиной С и углом размаха max коромысла, строят два крайних положения коромысла DC1 и DC2. На отрезке C1C2, как на хорде, строится окружность m, для которой на дугу C1C2 опирается центральный угол равный , где угол  определяется по формуле (4.30).
определяется по формуле (4.30).
Центр окружности m есть пересечение биссектрисы угла |
max |
и линии, проведенной через точку C1 (или C2 ) под углом |
к |
этой биссектрисе (рис. 4.54). Если центр А вращения кривошипа расположить на окружности m, то вычисленное значение и, следовательно, заданное значение k будут обеспечены.
Пусть реакция в шарнире С направлена вдоль шатуна. Тогда угол давления шатуна на коромысло во время рабочего хода
|
1 , |
|
2 |
||
|
где острый угол, образованный отрезками ВС и СD.
Угол давления в крайних положениях механизма зависит от положения точки А на окружности m и от соотношения между max и .
101
|
|
|
|
|
|
|
|
|
Рис. 4.54 |
||
Пусть |
max> . Тогда точка D лежит внутри окружности, |
||||
1> 2 и 1> |
2, то есть угол давления будет максимальным при |
||||
крайнем правом положении коромысла. В этой случае точку А следует располагать на пересечении окружности с прямой,
проходящей через точку C2 под углом 2 |
|
к отрезку |
|
2 |
|||
|
|
||
DC2. |
|
|
При max< точка D лежит вне окружности m1, 1> 2 и 1< 2, то есть угол давления будет максимальным при левом крайнем положении коромысла. В этом случае точку А следует располагать на пересечении окружности m с прямой, про-
точка D лежит вне окружности m1, 1> 2 и 1< 2, то есть угол давления будет максимальным при левом крайнем положении коромысла. В этом случае точку А следует располагать на пересечении окружности m с прямой, про-
ходящей через точку под углом 1 |
|
к отрезку DC1. |
|
2 |
|||
|
|
При выполнении указанных условий для рабочего хода всегда будет выполняться ограничение на угол давления
max [ ] ,
где [ ] – допустимый угол давления.
102

Для холостого хода это условие может нарушаться, но, учитывая, что на холостом ходе нагрузка на механизм минимальна, можно допустить небольшое превышение углом давления величины[ ].
Пусть a и b – длины кривошипа и шатуна, а 1 = b – a,
2 = b + a.
Из треугольника OС1С2 определяется радиус окружности
|
r |
c |
sin 0,5 |
max |
. |
|
|
|
|
||||
|
|
|
|
sin |
|
|
Из равнобедренных треугольников АOС1 и АOС2 следует: |
||||||
1 |
2r sin([ |
] 0,5 |
max); |
|||
2 |
2r sin([ |
] |
0,5 max). |
|||
Можно записать: |
a=( 2 –1)/2; |
|||||
b=( 2+ 1)/2.
Из треугольника ADС2 определяется длина стойки AD = d:
d  (a b)2 c2 2c(a b)sin[ ].
(a b)2 c2 2c(a b)sin[ ].
Таким образом, по значению k определяется , а затем по заданным max, CD Cu [ ] – определяются длины всех
звеньев кривошипно-коромыслового четырехзвенника. Аналогичным образом решаются и другие подобные задачи для иных типов плоских механизмов.
4.3.5. Синтез направляющих и мальтийских механизмов 4.3.5.1. Точные направляющие механизмы
Точным направляющим механизмом называется механизм, траектория некоторой точки заданного звена которого, присоединенного кинематическими парами только к подвижным звеньям, точно совпадает с заданным участком кривой,
103
при условии, что погрешности изготовления механизма не учитываются.
Такие механизмы предназначены для воспроизведения движений по прямой линии (прямолинейно-направляющие механизмы), по дугам окружностей и по кривым конических сечений (коникографы). На рис. 4.55 показан механизм эллипсографа, любая точка шатуна которого описывает эллипс.
 A
A
B
Рис. 4.55
Общая теория синтеза точных направляющих механизмов достаточно сложна, и ее методами проектируются механизмы с большим числом звеньев. Для синтеза механизмов с меньшим числом звеньев, приближенно воспроизводящих заданные кривые, используются более простые методы.
На точность воспроизведения направляющими механизмами заданных кривых сильно влияют погрешности изготовления их звеньев и кинематических пар. С увеличением числа звеньев эта точность, как правило, снижается. Поэтому в действительности точных направляющих механизмов не существует.
4.3.5.2. Методы синтеза приближенных направляющих механизмов
Приближенным направляющим механизмом называется механизм, некоторая точка заданного звена которого, присоединенного кинематическими парами только к подвижным звеньям, описывает траекторию, мало отличающуюся от за-
104

данной кривой на заданном ее участке. Направляющий механизм, приближенно воспроизводящий некоторую кривую, имеет меньше звеньев, чем воспроизводящий ту же кривую точный направляющий механизм. Поэтому иногда за счет влияния погрешностей изготовления точные направляющие механизмы воспроизводят заданные кривые менее точно, чем воспроизводят те же кривые приближенные направляющие механизмы.
Методы синтеза приближенных направляющих механизмов делятся на три группы: методы оптимизации, методы теории приближения функций и методы графического поиска. Методы первых двух групп были рассмотрены выше.
Методы теории приближения функций в синтезе приближенных механизмов применяются в тех случаях, когда удается получить сравнительно простое аналитическое выражение для отклонения кривой, воспроизводимой механизмом, от заданной кривой. Для вычисления параметров приближенных направляющих механизмов, за исключением прямолинейнонаправляющих механизмов, используется взвешенное отклонение q. Аналитическое выражение для q получается размыканием одного из шарниров и введением фиктивной длины для одного из звеньев. Например, в задаче синтеза шарнирного четырехзвенника по заданной шатунной кривой размыкают шарнир С и точка М шатуна помещается на заданную кривую y = f(x), перемещаясь по ней.
При этом точка С шатуна описывает некоторую кривую, не являющуюся в общем случае дугой окружности. Таким образом, задача приближения к заданной кривой y = f(x) сводится этим приемом к задаче приближения траектории точки С шатуна к дуге окружности, и из её решения определяются параметры синтеза. За взвешенное отклонение в таких случаях берется величина
q c2 cф2 ,
105

где c и cф – действительное и фиктивное расстояние между точками С и D.
Выражение для q получают из геометрических соображений и в зависимости от числа параметров синтеза представляют в виде обобщенного полинома – линейного или нелинейного. Из данных выражений параметры синтеза приближенных направляющих механизмов составляются и решаются методами, подобными рассмотренным выше на примере синтеза передаточного четырехзвенника. Аналогично решаются задачи синтеза и других приближенных направляющих механизмов. Синтез пространственных приближенных направляющих механизмов производится, как правило, методами оптимизации с использованием ЭВМ.
Методы графического поиска. Один из этих методов рассмотрим на примере синтеза приближенного направляющего шарнирного четырехзвенника (рисунок 4.50). Пусть задачей синтеза является подбор размеров и конфигураций звеньев, а также определение положения стойки АD шарнирного четырехзвенника, точка М шатуна которого описывает кривую, близкую к кривой y = f(x). Графический поиск начинается с выбора положения точки А, длин кривошипа АВ и отрезка ВМ шатуна, при которых точка М незамкнутой кинематической цепи АВМ может совпасть с любой из точек, заданной кривой. Далее с отрезком ВМ связывается плоскость П и строятся траектории некоторых ее точек при движении точки М по заданной кривой и вращении кривошипа вокруг точки А. Полученные траектории анализируются, и из них выбирается кривая, наиболее близкая к дуге L некоторой окружности. Точка, описывающая эту траекторию, принимается за центр шарнира С четырехзвенника, а взаимное расположение точек В, С, К определяет длину отрезка ВС шатуна, а также угол между отрезками ВМ и ВС. Радиус дуги L окружности, к которой наиболее близка траектория точки С, определяет длину коромысла СD, а центр этой окружности дает положение центра кинематической пары С. Все величины определяются методом подбора.
106

Процесс графического поиска облегчается при использовании специальных приборов, фиксирующих одновременно траектории нескольких точек плоскости П, например нескольких отверстий, через которые параллельный пучок световых лучей воздействует на фотобумагу, или нескольких пишущих устройств, скрепленных с плоскостью П.
При синтезе пространственных приближенных направляющих механизмов методы, аналогичные по сущности методам, изложенным выше, реализуются гораздо более сложными путями.
4.3.5.3. Механизмы Чебышева
Из направляющих механизмов наиболее широко распространены механизмы, воспроизводящие дуги окружностей (круговые направляющие механизмы) и отрезки прямых линий (прямолинейно направляющие механизмы). Задачи синтеза таких механизмов впервые были исследованы П.Л. Чебышевым методами теории приближения функций в предположении, что воспроизводимые ими кривые имеют хотя бы одну ось симметрии.
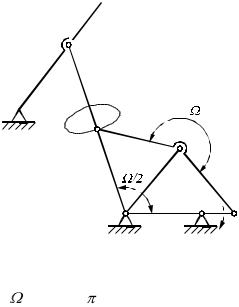
Один из механизмов Чебышева (рис. 4.56) предназначен для преобразования непрерывного равномерного движения кривошипа АВ в качательное движение звена ЕF с длительной остановкой (выстоем) в крайнем положении.
Для механизма характерно условие
BС = CD=CM=b, |
(4.31) |
в силу которого траектория точки М симметрична относительно
оси, проходящей через точку D под углом |
|
к стойке АD, где |
|
2 |
|||
|
|
– угол между частями ВС и МС шатуна. Величины a, d, выбираются из условий наилучшего приближения шатунной кривой дуге окружности с центром на оси симметрии. При выполнении этих условий шатунная кривая пересекает окружность шесть раз,
107
достигая семь раз предельного отклонения при чередовании его знака.
Пусть длина звена ЕМ равна радиусу окружности, к которой наиболее близка шатунная кривая, и пусть точка Е в крайнем положении попадает в центр этой окружности. Тогда при движении точки М по части кривой, близкой к окружности точки Е, звено EF будет почти неподвижным, а при движении по остальной части – звено ЕF будет перемещаться на заданный угол размаха, определяемый параметрами механизма. Таким образом реализуется длительный выстой звена.
E 
F 
M |
|
b |
C |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
b |
b |
|
|
D |
|
d |
A a |
B |
|
|
|
|
Рис. 4.56
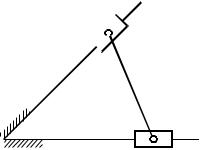
Если в рассмотренном механизме сохранить условие (4.29), сделать равным и отбросить звенья EF и ЕМ, то получится прямолинейный направляющий механизм Чебышева (рис. 4.57). Этот механизм получается из рассмотренного выше механизма Чебышева увеличением длины звена ЕМ до бесконечности и поэтому является частным случаем этого механизма.
Основные параметры этого механизма а, b и d должны удовлетворять условию 3d – а = b, при котором траектория точки М наименее отклоняется от прямой линии и выполняются условия наилучшего приближения. При этом условии
108

шатунная кривая имеет шесть точек пересечения с прямой, а предельное отклонение достигается семь раз при последовательно меняющихся знаках. О точности воспроизведения прямой можно судить по следующим результатам: при d = 2,22, a отношение максимального отклонения от прямой линии к длине прямолинейного участка не превосходит 10-3. Такое отклонение графическими методами не обнаруживается. За сходство рассмотренного прямолинейного направляющего механизма Чебышева в среднем положении (рис. 4.57) с буквой он называется иногда лямбдообразный.
|
M |
B1 |
C1 |
|
b |
|
|
|
|
b |
|
|
|
b |
|
D1 D |
d |
A a |
B |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.57
На рисунке 0.57 штриховыми линиями показан шарнирный четырехзвенник А1B1C1D1, являющийся модификацией лямбдообразного механизма и называемый перекрестным. При
А1B1=C1D1=2b, B1M=a, B1C1=2a, А1D1=2d
перекрестный и лямбдообразный механизмы описывают точкой М одинаковые траектории.
109
4.3.5.4. Теорема Робертса
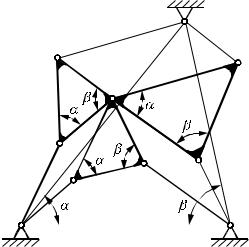
При синтезе приближенных направляющих механизмов необходимо учитывать дополнительные условия синтеза: ограничения на угол давления, на скорости и ускорения точек некоторых звеньев, а также другие условия. Поэтому очень важной и широко используемой при синтезе приближенных направляющих механизмов является теорема Робертса: любая шатунная кривая шарнирного четырехзвенника может быть воспроизведена в общем случае тремя различными шарнирными четырехзвенниками.
Эта теорема допускает преобразования шарнирных четырехзвенников при сохранении их способности к воспроизведению заданной кривой. Значение этих преобразований для практики велико, потому что, имея один из механизмов, воспроизводящих заданную кривую, можно создать два других механизма, воспроизводящих ту же кривую, и из них выбрать лучший по дополнительным условиям синтеза.
Пусть имеется четырехзвенник А1B1C1D1, воспроизводящий точкой М шатуна некоторую кривую (рис. 4.58).
|
|
D2 |
|
A |
||
|
|
|
3 |
|
|
|
|
|
C2 |
|
|
|
B3 |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
B2 |
|
|
|
|
|
|
C1 |
C3 |
|||
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
|
A2 |
|
|
|
|
|
D3 |
|
A1 |
|
D1 |
|||
|
|
|
|
|
||
Рис. 4.58
110