

Учебное пособие 1969
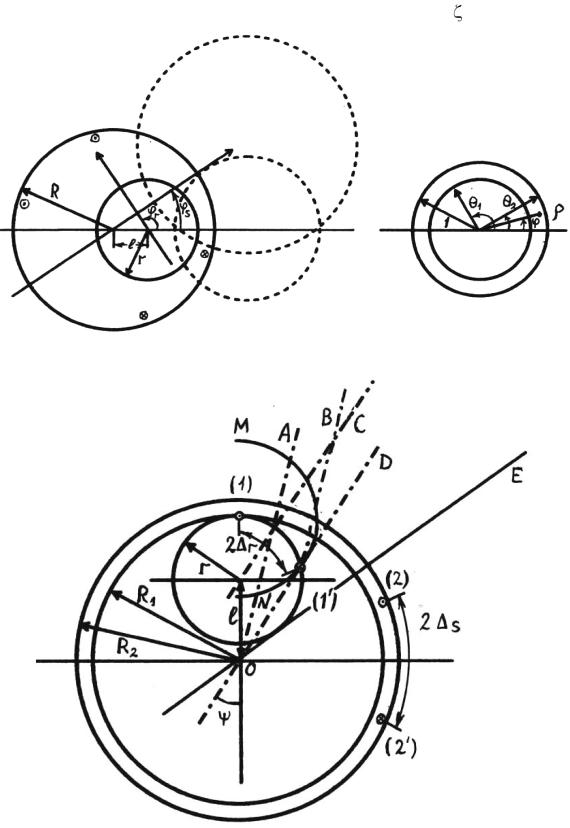
.pdfточке пересечения большого и малого кругов, и угла |
. Очевидно, между |
|||
этими двумя величинами имеется связь. Так, |
при вертикальном положении |
|||
линии OD, величина О1' максимальна и равна R1, при этом =0, а при гори- |
||||
зонтальном положении 2 |
, O1' (R1-r), а |
= /2. Кроме этого, у |
также |
|
существует максимум, обусловленный размером сателлита (луч OE). |
Как |
|||
длина отрезка Ol', так и угол |
зависят от r. |
На рис. |
- приведены данные |
|
зависимости, построенные на основании тригонометрических зависимостей
для сателлитов одного и того же радиуса для четырех случаев: n=2, 3, 4, 6.
Очевидно из соображений получения максимальной взаимоиндукции,
следует максимизировать величину 1. Рассматривая ее как мультиплика-
тивный критерий от величин и O1' можно получить зависимости - см. рис.
, откуда следует вывод о предпочтительности двух сателлитных систем. Од-
нако, не следует забывать, что данные зависимости получены из условия по-
стоянства r, то |
есть величина |
R1 |
- варьируется от 2r(n=2) до 3r(n=6). По- |
||||||
этому такой результат объясняется увеличением радиуса R1 при увеличении |
|||||||||
числа сателлитов. |
|
|
|
|
|
|
|
||
Для учета влияния R1 на рис. приведена зависимость для O1' в едини- |
|||||||||
цах R1, |
а на рис. |
- соответствующие кривые для |
1 |
в единицах R1 /4, ко- |
|||||
торые, |
как видно, |
имеют в принципе такой же характер, как и в единицах |
|||||||
r /4. |
|
|
|
|
|
|
|
|
|
Таким образом, введение |
сегментных |
вставок |
позволяет использо- |
||||||
вать известные |
зависимости, характерные |
для машин обычного исполне- |
|||||||
ния, для орбитальных систем. |
В |
частности, учитываются вышеупомяну- |
|||||||
тые три особенности орбитальных систем: |
|
|
|
|
|||||
- применение |
вставок ведет |
к уменьшению |
разницы |
для тангенци- |
|||||
альной и радиальной составляющих поля, |
|
|
|
|
|||||
- расчет ведется для одного ротора и примыкающего |
к нему участка |
||||||||
статора, |
при этом применение вставок сглаживает влияние полюсности и |
||||||||
61
возможных синхронных моментов,
- появляется возможность расчета коэффициентов взаимоиндукции,
причем для наиболее типичных случаев приведены готовые зависимости,
позволяющие воспользоваться расчетными соотношениями, при этом воз-
можно использование как радиуса сателлита, так и радиуса составного ро-
тора.
62
Z
Рис. 2.1. Конформное отображение плоскости Z на кольцо плоскости 
Рис. 2.2. Взаимное расположение витков с током на поверхности статора и ротора орбитальной системы
63
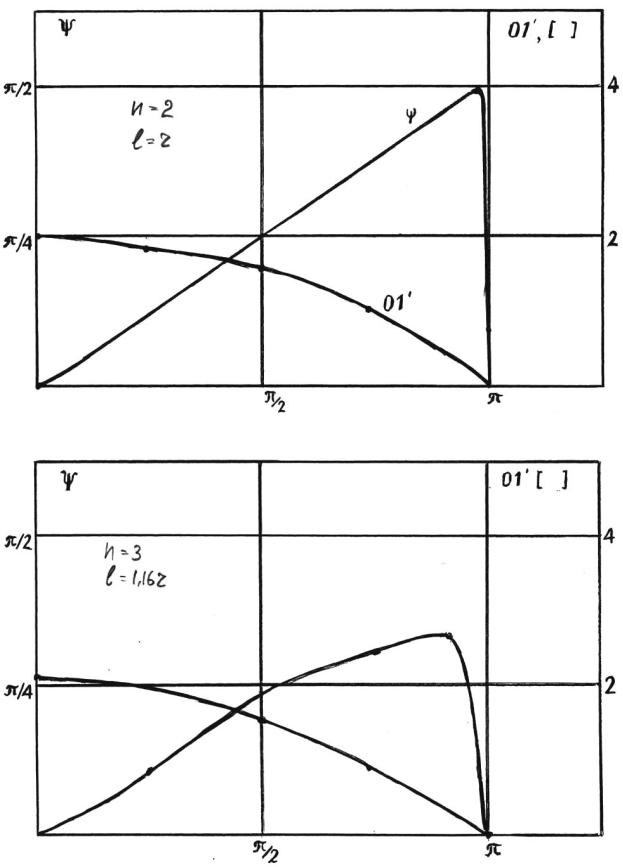
Рис. 2.3.
Рис. 2.4.
64
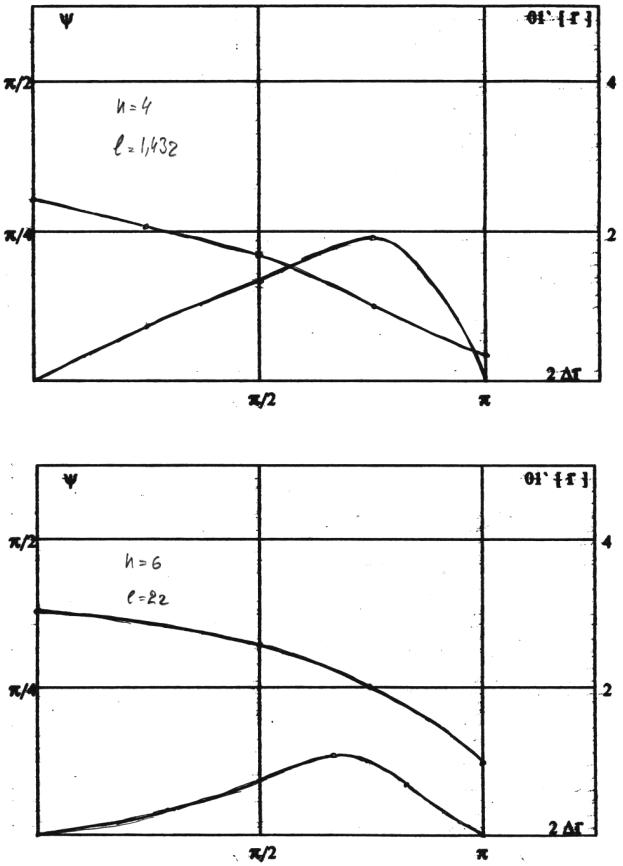
Рис. 2.5.
Рис. 2.6.
65
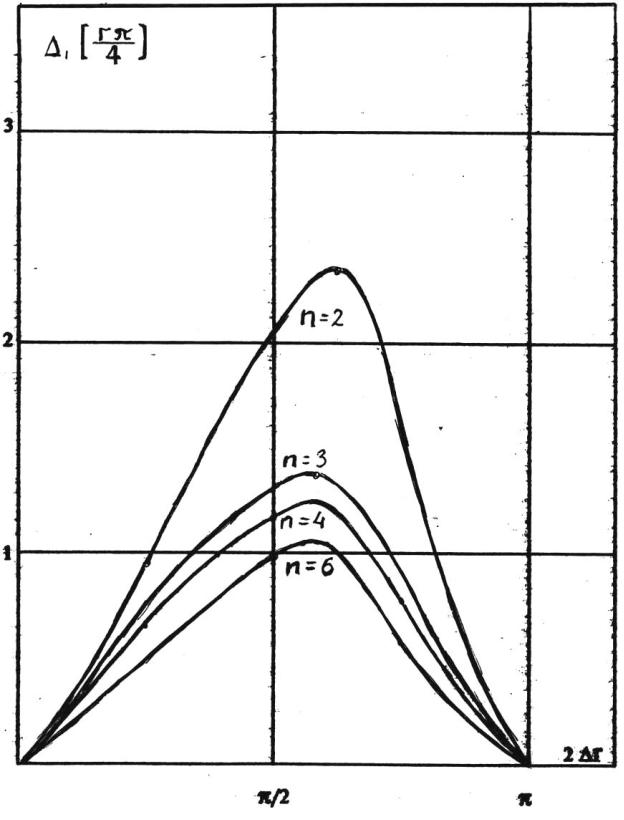
Рис. 2.7.
66
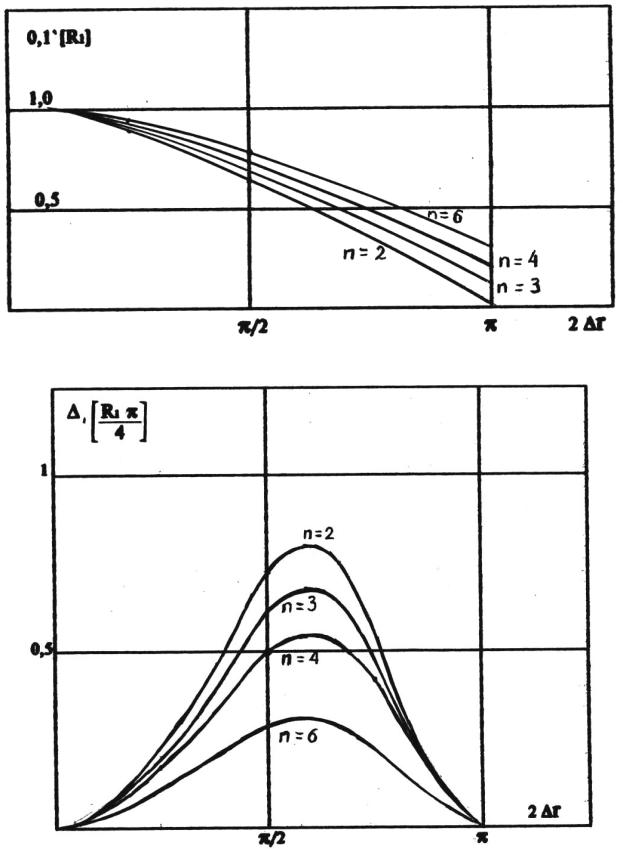
Рис.2.8.
Рис. 2.9.
67

3. ВЫБОР ОПТИМАЛЬНЫХ РОТОРОВ ОРБИТАЛЬНЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ.
Орбитальные электромеханические системы, применяемые в робото-
технике, допускают значительное варьирование числа рабочих роторов Так,
например, для привода выдвижения руки электромеханического робота гру-
зоподъемностью 0,2 кг, при условиях:
idem, M Н idem
возможно использование якорей классической барабанной конструкции (се-
рии ДМП) или полых якорей серии ДПР. В первом случае возможны вари-
анты использования 2, 4, 8, 40 роторов соответственно габаритов 35, 30, 25 и 20. Во втором случае могут быть применены 1, 2, 4, 8, 16 и 40 роторов со-
ответственно габаритов 72, 62, 52, 42, 32 и 22. По конструктивным соображе-
ниям, в частности, в случае применения цилиндрической внешней магнитной системы и реечной передачи выдвижения, варианты с большим (8, 16, 40)
числом роторов затруднительны в исполнении из-за резкого увеличения механических узлов, однако варианты с 2 и 4 роторами практически равно-
значны и требуют дальнейшей мотивации для определенного выбора.
Таким образом, требуется установление некоторого критерия выбора оптимального числа роторов. Такой критерий, очевидно, должен иметь не-
сколько составляющих, характер изменения которых относительно числа ро-
торов должен быть различным с тем расчетом, чтобы можно было опреде-
лить максимум или минимум критерия, которому и соответствует опти-
мальное число роторов. В качестве таких составляющих можно использо-
вать различные параметры. Для получения определенного однозначного решения необходимо остановиться как минимум на двух: один из которых должен быть обратно пропорциональным производительности механизма, а
другой пропорционален стоимости. При этом, если при увеличении числа
68
роторов Ur первый параметр имеет падающий характер, а второй - возрас-
тающий, то исследование их суммы на минимум определит оптимальное число роторов, при котором минимальная стоимость будет соответствовать максимальной производительности.
В качестве параметра, обратно пропорционального производительно-
сти, целесообразно использовать, момент инерции ротора, электромеханиче-
скую постоянную времени, а та в свою очередь, время разгона и торможе-
ния. Очевидно, что минимизация этого времени для привода робота, ра-
ботающего исключительно в повторно-кратковременном режиме, повысит производительность в течении цикла. В качестве второго параметра целесо-
образно выбрать суммарную массу якорей, поскольку она однозначно связа-
на со стоимостью, и габаритами, что важно как по экономическим, так и по компоновочным соображениям.
Таким образом, зададим аддитивный критерий качества I в виде ли-
нейной свертки:
I |
П |
max |
TM |
(Ur ) mE (Ur ) |
1 J a (nr ) r mE (nr ) min |
|
C |
min |
|||||
|
|
|
|
где П - производительность, С - стоимость,
Тм - электромеханическая постоянная,
Jа - момент инерции, mE - суммарная масса, nr - число роторов.
1, 2 - весовые коэффициенты, рассматриваемые как показатели отно-
сительной значимости отдельных критериев;
J a (nr ) min mE (nr ) min
На рис. приведены полученные на основании обработки данных дви-
гателей серим ДПМ зависимости Ja(nr) и mE(nr), на рис. - аналогичные кри-
вые для серии ДПР. Предположим, что данные кривые можно аппроксими-
69
ровать экспонентами вида;
m |
E |
( n |
|
r |
) m(1 e nr / T1 |
) |
||||
|
|
|
|
|
|
|
|
|||
J |
|
|
(n |
|
) |
J a0 |
e nr / T2 |
|
||
a |
r |
T2 |
|
|||||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
где m, Ja0, Т1 и Т2 - соответствующее показатели экспонент, при этом линейная свертка будет иметь вид:
причем здесь и далее нулевые индексы относятся к одному ротору.
I m(1 e nr / T1 ) |
J a0 |
e nr / T2 |
|
T2 |
|||
|
|
Дифференцируя данное выражение по nr и приравнивая далее к нулю,
находим:
|
T T ln(J 0T / T 2 m) |
||
n2 |
1 2 |
a 1 2 |
|
T1 |
T2 |
||
|
|||
Данное условие справедливо при полной идентичности моментов и мощности, что справедливо для многодвигательных соединений, но для ор-
битальных систем возможно ослабление поля, поэтому для них это условие справедливо при условии идентичности интенсивности поля, и соответствен-
но, силовых соотношений.
Для двигателей с барабанным якорем обычного типа зависимость сум-
марной массы от числа роторов выражается обычно не возрастающей экспо-
нентой, а прямой линией:
mE m  nr ,
nr ,
где - некоторый коэффициент.
Для данного случая линейная свертка имеет вид:
I m nr |
J a0 |
e nr / T2 , |
|
T2 |
|||
|
|
далее, находя экстремум обычным способом, имеем:
70