

755
.pdfцентр тяжести С может быть смещен относительно оси вращения О на величину rc с дисбалансом D = mrc.
Рис. 8.1. Статическое уравновешивание плоского звена
Цель статической балансировки — переведение центра тяжести С на ось вращения О. Для этого необходимо диамет-
рально противоположно точке С поставить противовес,
отвечающий условию (8.3):
D Dп 0; |
mrc mп |
rп . |
Для уменьшения массы противовеса его устанавливают на максимально возможном расстоянии rп. Условие момент-
ного уравновешивания (8.4) требует постановкивдвухплоскостяхприведения равных, но противоположно лежащих противовесов mп на расстояниях rп c плечом l
(рис. 8.2).
Момент пары сил инерцииэтихпротивовесов должен быть равен
главному моменту дис-
Рис. 8.2. Моментное
балансов, но направлен уравновешивание противоположно. Из те-
ории динамической балансировки известно, что центробежные силы и моменты неуравновешенных элементарных масс можно привести к эквивалентной системе, состоящей из двух скрещивающихся сил, которые расположены в двух произвольно выб-
101
ранныхплоскостях, перпендикулярныхкосивращенияивращающихся вместе с ротором (крест сил).
Задача балансировки ротора решается по-разному в зависимости от того, известна или неизвестна масса, смещенная с оси вращения. В данной работе векторы дисбалансов заданы.
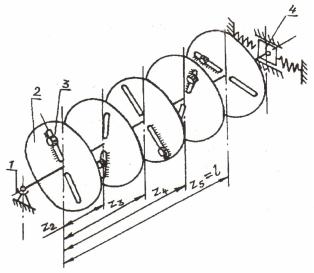
8.2. Описание установки ТММ-35
Вал ротора 1 (рис. 8.3) смонтирован на кронштейнах, закрепленныхначугунномосновании.
Рис. 8.3. Схема установки ТММ-35
На валу ротора установлено пять дисков 2. В крайних дисках закрепляются противовесы, а три средних диска служат для установки неуравновешенных грузов 3. Левый конец вала уста- новленвсферическомшарикоподшипнике,аправый—вкаретке 4, колебания которой при вращении ротора определяют его неуравновешенность.Разгонротораосуществляютэлектродвигателем, закрепленным на рычаге, через фрикционную передачу.
При нажиме на рукоятку рычага вниз двигатель автоматически включается и крутящий момент передается через обрезиненный ролик на шкив, закрепленный на валуротора.
В комплекте установки имеется набор противовесов массой mi = 40, 50, 60 и 70 г. Они могут быть поставлены в пазы дисков
102

на различных расстояниях от оси вращения (ri = 40...90 мм). Углы поворота каждого диска i отсчитываются по шкале на валу ротора. Расстояния между соседними дисками — z2 = 80 мм, между крайними дисками — z5 = 320 мм. При отсутствии на дисках грузов ротор статически и динамически уравновешен.
8.3.Векторные уравнения и их решения
Влабораторной установке (см. рис. 8.3) на дисках 2, 3 и 4 устанавливают неуравновешенные грузы с заданными параметрами m, r и .
Статическое уравновешивание. Искомый противовес с
массой m1 на расстоянии r1 устанавливают на первом диске под углом 1. Параметры противовеса определяют графически из условия(8.3):
|
|
|
|
|
m2 |
r2 m3 |
r3 m4 |
r4 m1 |
r1 0, |
(8.5) |
||||||||
или |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
(8.6) |
|
|
|
|
|
|
|
|
|
D |
D3 D4 D1 0, |
|||||||||
где |
|
2 , |
|
|
|
|
8.4), |
|||||||||||
D |
D3 и D4 – отрезки прямых на графике (рис. |
|||||||||||||||||
изображающие дисбалансы заданных грузов, мм; D1 –отрезок, мм, изображающий параметры искомого противовеса на диске 1.
Для построения векторного многоугольника выбирают масштаб дисбаланса в мм/(г · мм):
D |
D2 |
|
. |
(8.7) |
m r |
||||
2 |
2 |
|
|
|
Углы откладывают в направлении против часовой стрел-
ки относительно положительного направления оси х. Начало следующеговектора прикладываюткконцупредыдущего. Искомый вектор — замыкающий, проводимый из конца вектора D4
в начало вектора D2. Направление радиуса-вектора противо-
веса определяется углом 1, измеряемым по чертежу таким образом, чтобы начало вектора находилось в начале коорди-
нат. Уравновешивающий дисбаланс D1, г· мм:
D |
D1 |
. |
(8.8) |
|
|
||||
1 |
|
D |
||
|
|
|
||
103
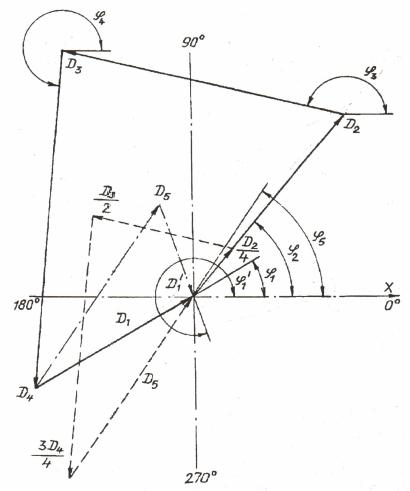
Рис. 8.4. Векторные многоугольники
Задаваясьмассойm1 изнаборагрузов,рассчитываютвеличину радиуса-вектора r1, мм:
r1 D1 /m. |
(8.9) |
Угол расположения противовеса 1 определяют из векторногомногоугольника.
Моментное уравновешивание. Для приведения к нулю главного момента дисбалансов на первом и пятом дисках
104
устанавливают два противовеса противоположно друг дру-
гу. Параметры груза на пятом диске определяют по уравнению
(8.4):
m2 |
r2z2 m3 |
r3z3 m4 |
r4z4 m5 |
r5z5 0, |
(8.10) |
где z2 ...z5 — расстояния от плоскости приведения (первого диска) до остальных дисков.
Вуравнении(8.10)отсутствуетпроизведение,таккак m1r1z1 = 0. Расстояния z2 = l/ 4, z3 = l/ 2, z4 = 3l/ 4, отсюда, после деления
уравнения (8.10)на l, получают: |
|
||||||||||||||||
|
1 |
|
|
2 |
|
1 |
|
|
|
|
3 |
|
|
4 |
|
|
(8.11) |
|
D |
D3 |
D |
D5 0. |
|||||||||||||
4 |
|
|
|||||||||||||||
|
|
|
2 |
|
|
|
4 |
|
|
|
|
|
|
||||
Векторный многоугольник по уравнению (8.11) строят в мас-
штабе D на графике статического уравновешивания (штри-
ховые линии на рис. 8.4). Искомый уравновешивающий дисбаланс D5 = D5 / D. Радиус-вектор r5 = D5 / m5. Угол расположения противовеса 5 определяют из векторного многоугольника. Для моментного уравновешивания один груз с параметрами m5, r5 и5 устанавливают на диске 5. Второй груз с параметрами m5, r5
и 1 5 180 следует установить на первом диске.
Полное (динамическое) уравновешивание. Для полного уравновешивания два груза, которые должны быть установлены на диске 1, заменяют эквивалентным грузом, так как в установке не предусмотрена возможность размещения двух гру-
зов на одном диске. Полное уравновешивание ротора предполагает одновременно статическое и моментное уравновешивание. Параметры эквивалентного груза находят из условия статического уравновешивания:
(8.12)
Построения ведут на графике (см. рис. 8.4), где из конца вектора D4 проводят вектор D5 , найденный из моментного уравновешивания, а замыкающий векторбудет искомым(последние два вектора проводят штрихпунктирными линиями).
Установленный ранее на первый диск противовес снимают,
устанавливая вместо него противовес с параметрами 1,m1,r1r1 D1 /m1 . На диск 5 устанавливают противовес с параметра-
ми 5,m5,r5 .
105

8.4.Порядок выполнения работы
Меры предосторожности:
Электродвигатель установки включать только после раз-
решения преподавателя, предварительно выполнив построения графиков и расчетыпополномууравновешиванию. Включатель
«Сеть» должен быть отключен.
Запрещено касаться руками вращающихся частей. Ротор разгонять до зарезонансных скоростей и тормозить только фрикционной передачей! Торможение выполнять при выключенном двигателе!
Порядок выполнения работы следующий.
1. Записать в отчет параметры неуравновешенных грузов из табл. 8.1 в соответствии с заданным вариантом.
|
|
Исходные данные |
Таблица 8.1 |
|
|
|
|
||
|
|
|
|
|
№ диска |
№ варианта |
Масса т, г |
Расстояние r, мм |
Угол , град |
|
1 |
50 |
50 |
300 |
|
2 |
40 |
70 |
60 |
|
3 |
50 |
40 |
10 |
|
4 |
40 |
50 |
330 |
2 |
5 |
50 |
50 |
115 |
|
6 |
50 |
50 |
300 |
|
7 |
50 |
60 |
30 |
|
8 |
60 |
60 |
10 |
|
9 |
40 |
60 |
80 |
|
10 |
40 |
40 |
260 |
|
1 |
60 |
60 |
50 |
|
2 |
60 |
50 |
330 |
|
3 |
60 |
70 |
200 |
|
4 |
50 |
70 |
210 |
3 |
5 |
50 |
60 |
250 |
|
6 |
50 |
70 |
50 |
|
7 |
70 |
70 |
150 |
|
8 |
40 |
70 |
60 |
|
9 |
60 |
70 |
300 |
|
10 |
50 |
70 |
325 |
|
1 |
70 |
50 |
120 |
4 |
2 |
70 |
60 |
240 |
|
3 |
70 |
90 |
320 |
|
4 |
60 |
40 |
150 |
106
Окончание табл. 8.1
№ диска |
№ варианта |
Масса т, г |
Расстояние r, мм |
Угол , град |
4 |
5 |
60 |
50 |
180 |
|
6 |
60 |
50 |
130 |
|
7 |
60 |
60 |
240 |
|
8 |
50 |
80 |
180 |
|
9 |
70 |
50 |
250 |
|
10 |
50 |
80 |
80 |
2.Проверить статическую балансировку ротора, задавая ему от руки вращение с незначительной скоростью. Статически уравновешенныйроторостанавливаетсявлюбомположенииине имеет колебательного движения.
3.Рассчитать произведения Di = mi ri , выбрать масштаб D и построитьвекторныймногоугольникпоуравнению(8.5)—лини- ямисплошнымиосновными.
4.Определить из графика статической балансировки угол
установки противовеса 1 и длину отрезка D1 . Задаваясь массой противовеса m1 (40, 50, 60, 70 г), определить по формуле (8.9) величину расстояния r1, которое должно находиться в пределах
r= 40…90 мм.
5.Установить грузы с заданными параметрами на дисках 2, 3 и 4 и убедиться, чторотор неуравновешен:при сообщении ему вращения рукой он останавливается в положении устойчивого равновесия (в одном и том же положении).
6.Рассчитанный в п. 4 противовес установить на диске 1 и проверить статическую уравновешенность ротора (см. п. 2).
7.Выполнитьмоментноеуравновешивание. Построитьв мас-
штабе D векторный многоугольник по уравнению (8.11) — штриховыми линиями (см. рис. 8.4). Определить параметры m5, r5 и 5 и установить противовес на пятом диске.
8.Выполнить полное, или динамическое, уравновешивание. Построить векторный многоугольник по уравнению (8.12) — штрихпунктирными линиями (см. рис. 8.4) и определить дисба-
ланс D1 . Рассчитать противовес m1 и установить его вместо снятого противовеса m1.
9.Проверить статическую уравновешенность ротора (см. п. 2), так как полная уравновешенность предполагает и статическую уравновешенность.
107

10.Проверить динамическую уравновешенность. Для этого перевести включатель в положение «Сеть». Нажимая на рычаг
ивключая фрикционную передачу, разогнать ротор до высокой скорости. Выключить «Сеть» и, периодически подтормаживая двигатель рычагом, дать возможность поработать ротору при различных угловых скоростях, отмечая состояние резонанса, при котором свободный конец ротора будет совершать колебания с наибольшей амплитудой. При динамической уравнове-
шенности свободный конец ротора не будет совершать колебаний.
11.Вычертить схему установки (см. рис. 8.3).
8.5.Компьютерныерасчеты
Для определения параметров противовесов используют программу ТММ-8 в компьютерной системе Quick Basic. Для этого в папке«ТММ»активизируют файл qb.exe. Затем активизируют верхнее меню нажатием клавиши ALT. В опции верхнего меню FILE выбирают опцию OPEN (открыть), опускают курсор в список файлов клавишей TAB и стрелкой находят файл ТММ8, вызвавегоклавишейENTERилищелкнувлевойклавишеймыши на ОК.
В начале расчета необходимо ввести погрешность дисбаланса в пределах 20…50 г · мм. Затем ввести последовательно для
2, 3 и 4-го дисков m2, мм, r2, мм, 2, град; m3, r3, 3; m4, r4, 4.
Машина рассчитывает дисбалансыдисков Di = miri и решаеттри
векторныхуравнения.Векторы Di проецируютнакоординатные оси и производят их алгебраическое сложение.
На каждом из трех этапов на экране дисплея изображается векторный многоугольник и приводятся параметры противовесов. Полученные результаты занести в отчет. Студенту необходимо определить ошибку (в процентах) в расчетах дисбалансов, произведенных графоаналитическим и аналитическим способами. Максимальная ошибка не должна превышать 5%.
Вопросыкзащитеработы
1.В чем состоит цель работы?
2.Каково условие статического уравновешивания звена?
3.Как определяют дисбаланс звена?
4.Как определяют главный вектор дисбалансов звена?
108
5.В чем состоит физический смысл статического уравновешивания?
6.Каково условие моментного уравновешивания звена?
7.Как определяют главный момент дисбалансов звена?
8.Чем уравновешивается главный момент дисбалансов?
9.Что собой представляет полное уравновешивание?
10.Как определяют искомый вектор по известным векторам?
Лабораторная работа№9
БАЛАНСИРОВКАРОТОРА
Цель работы: динамическая балансировка ротора при неизвестном расположении неуравновешенных масс.
Оборудование: лабораторная установка ТММ-1К (балансировочный станок системы Б.В. Шитикова).
9.1.Общие положения
Спроектированный и изготовленный ротор, как правило, неуравновешен вследствие неоднородности материала, погрешности изготовления и т.п. Кроме того, в практике случаи, когда известны величины и положения неуравновешенных масс (см. лаб. работу № 8), встречаются редко. Поэтому любой быстроходный ротор должен быть подвергнут динамической ба-
лансировке на специальных станках (машинах).
9.2. Описание установки ТММ-1К
Балансировочный станок конструкции Б.В. Шитикова предназначен для динамической балансировки роторов. Неуравновешенный ротор 1 (рис. 9.1) с двумя симметрично расположенными дисками 2 и 3 установлен на подшипники 4 маятниковой рамы 5.
Конструкция подвеса рамы удерживает ее от продольных и поперечных перемещений и позволяет ей свободно поворачиваться вокруг оси О в вертикальной плоскости. Подвес маятниковой рамы рассчитан на ее колебания вместе с ротором при угловой амплитуде около 3°. Рама удерживается консольной стержневой пружиной 6. Рама подвешенана стойках, закрепленных на массивной плите.
Ротор приводится во вращение электродвигателем 7 через фрикционную передачу 8. Разгон ротора осуществляется рыча-
109
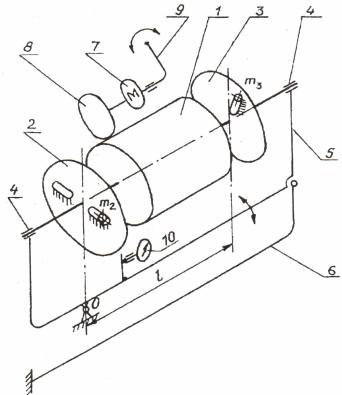
гом 9. Амплитуда колебаний рамы измеряется с помощью индикатора часового типа 10.
Рис. 9.1. Схема установки ТММ-1К
9.3. Краткие теоретические сведения
Динамическая неуравновешенность ротора может быть устранена с помощью двух корректирующих масс, располо-
женныхвдвухпроизвольновыбранныхплоскостях,перпендикулярных к оси вращения. В лабораторной установке ТММ-1К плоскости коррекции конструктивно совпадают с дисками 2 и 3 (см. рис. 9.1). Диск 2 располагают в плоскости, проходящей через ось качания О рамы 5. В этом случае вектор дисбаланса диска 2 не создает момента относительно оси О и на вынужденные колебания системы ротор – рама влияния не оказывает.
110