

книги / Системы управления исполнительными механизмами
..pdfЗачастую ПИМ комплектуются ручными дублерами с целью обеспечения возможности ручного управления затвором РО, а также позиционерами (усилителями мощности) для повышения быстродействия и точности установки выходного звена ИМ.
К основным параметрам пневматических устройств относятся: условный проход, диапазон давления воздуха, расходная характеристика, параметры управляющего воздействия, параметры выхода, утечки, время срабатывания, допускаемая частота включений, показатели надежности, размер, масса и др.
Рис. 1.11. Классификация ПИМ
ИМ обозначаются следующим образом: тип, вид действия, диаметр заделки мембраны, ход штока, наличие дополнительного устройства.
Пример обозначения: МИМ-ППХ-320-25-10, т.е. мембранный исполнительный механизм прямого действия, прямоходный, диаметр заделки мембраны 320 мм, ход штока 25 мм, дополнительное устройство отсутствует.
Мембранные пневматические исполнительные механизмы
(МПИМ) могут быть одностороннего |
и двойного |
действия. |
В устройствах одностороннего действия |
движение |
мембраны |
в одном направлении производится усилием возрастающего дав-
41

ления газа, а в противоположном – усилием пружины. В устройствах двойного действия движение мембраны в обе стороны осуществляется усилием от давления газа в надмембранную и подмембранную области.
|
Работа наиболее |
распространен- |
|
ных МПИМ одностороннего действия |
|
|
заключается в следующем (рис. 1.12). |
|
|
Под действием давления возду- |
|
|
ха Р, подаваемого |
в герметичную |
|
мембранную «головку» 4 сверху (над- |
|
|
мембранную область), шток 2, пре- |
|
|
одолевая противодействие пружины 3, |
|
|
изменяет положение клапана 1, тем |
|
|
самым изменяя его проходное сече- |
|
Рис. 1.12. Принципиальная |
ние. Степень открытия сечения клапа- |
|
на пропорциональна давлению возду- |
||
схема МПИМ: 1 – клапан; |
ха Р, подаваемого на мембранный ме- |
|
2 – шток; 3 – возвратная |
ханизм. Противодействующее усилие |
|
пружина; 4 – мембрана; |
и возврат штока в исходное положе- |
||
5 – сальник |
|||
ние при отсутствии давления |
в над- |
||
|
|||
мембранной полости осуществляются с помощью пружины 3. Мембрана изготавливается обычно из прорезиненной ткани толщиной 2–4 мм с жестким центром.
Поскольку при снятии давления Р мембрана всегда перемещается вверх, в зависимости от конструкции регулирующего органа различают нормально открытые и нормально закрытые клапаны.
Регулирующие клапаны выпускают двух типов: одно- и двухседельные. Односедельные клапаны (см. рис. 1.12) испытывают одностороннее действие давления регулируемой среды; оно выражается в «сжатии» или «отжатии» самого седла при изменении направления движения среды через регулирующий орган. Такой эффект является нежелательным, так как нарушает процесс регулирования. Для устранения этого эффекта используют двухседельный клапан. Два седла и затворы позволяют потоку регули-
42
руемого газа или жидкости протекать одновременно в противоположных направлениях, в результате чего регулирующий орган является разгруженным.
Односедельные клапаны требуют более мощного исполнительного механизма, так как на шток воздействует силадавления среды.
Вдвухседельном клапане сила, развиваемая исполнительным механизмом, затрачивается только на перемещение регулирующего органа, независимо от давления и скорости протекания регулируемой среды. Однако такие клапаны менее герметичны, чем односедельные.
Регулирующие органы имеют линейные или равнопроцентные пропускные характеристики. Статические характеристики большинства МПИМ близки к линейным, однако они обладают зоной гистерезиса, составляющей 2–15 % от наибольшего значения Р. Эта величина зависит от усилий трения в сальнике 5, перепада давления на регулирующем органе, характеристик пружины и эффективной площади мембраны. Перемещения штока h в среднем достигают 50– 70 мм, и эффективная площадь Р мембраны зависит от h. По мере возрастания Р зона гистерезиса уменьшается до 2–3 % и практически не влияет на качество переходных процессов в СУИМ.
Вдинамическом отношении МПИМ с зоной гистерезиса 2– 3 % можно считать усилительными звеньями при частоте среза до 0,3 рад/с. Если зона гистерезиса составляет 5–8 %, то частота среза уменьшается на порядок. Динамика МПИМ по каналу давление воздуха на входе в камеру – перемещение штока при малых воз-
мущениях приближенно описывается апериодическим звеном. В общем случае постоянная времени МПИМ зависит от перемещения штока h.
Основные технические характеристики мембранных ПИМ представлены в табл. 1.3.
Для уменьшения зоны гистерезиса и улучшения динамических характеристик МПИМ на исполнительный механизм устанавливают дополнительные компенсирующие усилители мощности, называемые позиционерами.
43
Таблица 1.3 Технические характеристики мембранных ПИМ
Эффективная площадь |
250 |
400 |
630 |
1000 |
мембраны, см2 |
|
|
|
|
Диаметр заделки, мм |
200 |
250 |
320 |
400 |
Условный ход штока, мм |
5, 10, 16 |
16, 25 |
25, 40 |
40, 60 |
Вид действия |
НО, НЗ |
НО, НЗ |
НО, НЗ |
НО, НЗ |
Входной сигнал, МПа |
0,02–0,4 |
0,02–0,25 |
||
Наибольшее усилие, необхо- |
12 |
16 |
25 |
32 |
димое для вращения на махо- |
|
|
|
|
вике дублера, кгс |
|
|
|
|
Масса привода без дополни- |
11,0 |
11,5 |
14,0 |
15,0 |
тельных блоков, кг |
|
|
|
|
Различают позиционеры, работающие по схеме компенсации перемещений и схеме компенсации сил. В позиционерах обоих ти-
пов МПИМ охватывается отрицательной обратной связью по положению штока, что исключает влияние на статические характеристики сил трения в сальнике, перепад давления на регулирующем органе и т.п. Одновременно с этим увеличение расхода воздуха, подаваемого в МПИМ, заметно улучшает динамические характеристики последнего.
Принципиальные схемы позиционеров обоих типов показаны на рис. 1.13.
Впозиционере, работающем по принципу компенсации перемещений (см. рис. 1.13, а), сигнал Р подается в сильфон 1, связанный рычажным механизмом 2 со штоком 3. При изменении Р ры-
чаг вращается относительно опоры О1 и перемещает золотник 5, изменяя тем самым подачу воздуха в камеру МПИМа (сигнал Pп). Мембрана МПИМ занимает новое положение, и рычаг 2 начинает
поворачиваться относительно оси О2, т.е. начинает работать отрицательная обратная связь.
Впозиционере, построенном по схеме компенсации сил (см. рис. 1.13, б), функции сильфона выполняет мембрана 1, перемещения которой через золотник 5 влияют на расход и давление
44
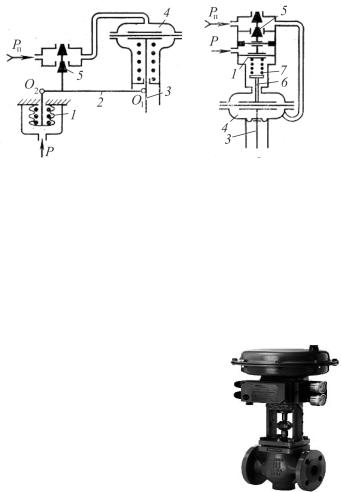
воздуха, подводимого в камеру МПИМ 4. Перемещения мембраны МПИМ через толкатель 6 и пружину отрицательной обратной связи 7 уравновешивают силу, действующую на мембрану со стороны давления Р.
а |
б |
Рис. 1.13. Принципиальные схемы позиционеров: а – с компенсацией перемещений; б – с компенсацией усилий; 1 – чувствительный элемент (сильфон, мембрана); 2 – рычаг; 3 – шток МИМ; 4 – надмембранная камера; 5 – золотник; 6 – толкатель; 7 – пружина обратной связи
Позиционеры первого типа используют в МПИМ с большими перемещениями штока (40–70 мм), позиционеры с компенсацией усилий – в МПИМ с малыми перемещениями (10–40 мм).
Управление современными ПИМ, в том числе МПИМ, осуществляют маломощными электрическими сигналами (преимущественно током в пределах 0–20 или 4–20 мА или напряжением в пределах 0–10 В). При этом часто такие ИМ относят к комбинированным и обозначают как
электропневматические исполнительные механизмы – ЭПИМ. Внеш-
ний вид конструкции мембранного ЭПИМ приведен на рис. 1.14.
45
ЭПИМ подразделяют на электропневматические позиционеры и электропневматические преобразователи.
Электропневматический позиционер является регулятором положения подвижной системы регулирующего клапана. Как в любой замкнутой системе, здесь присутствует объект регулирования (исполнительный механизм регулирующего клапана), регулятор (электропневматический позиционер), регулируемый параметр (положение штока клапана), сигнал действующего рассогласования (разница между заданным и действительным положением штока). Выходным сигналом регулятора (сигналом управления) является давление сжатого воздуха, поступающее в рабочую полость исполнительного механизма, или изменяющееся усилие тарированной пружины. Изменяя выходное давление или усилие тарированной пружины, позиционер обеспечивает соответствие положения штока клапана задающему сигналу, компенсируя усилия, действующие на подвижную систему клапана (трение в подвижных соединениях, статическое и динамическое воздействие регулируемой среды).
Если применяется регулирующий клапан с пневматическим позиционером, но имеется необходимость интегрировать этот клапан в электронную систему управления, то можно установить между системой и пневматическим позиционером электропневматический преобразователь.
Электропневматический преобразователь осуществляет по-
следовательное преобразование по схеме ток управления – расход воздуха – давление воздуха – перемещение РО без контроля действительного положения штока ИМ. Такие преобразователи проще, надежнее, дешевле и по совокупности критериев практически не уступают электропневматическим позиционерам, если зона гистерезиса ничтожно мала. Электропневматический преобразователь преобразует, как правило, стандартный токовый сигнал 4–20 мА в пневматический сигнал 0,2–1,0 бар или в сигнал любого другого диапазона в соответствии с имеющимся давлением сжатого воздуха.
46
Применение электропневматического преобразователя может быть целесообразно для малоинерционных систем управления, в которых применение довольно инерционных позиционеров является нежелательным. Например, регулирование расхода жидкости с применением позиционеров часто ведет к колебательности регулируемого расхода.
Поршневые пневматические исполнительные механизмы
(ППИМ) применяют в тех случаях, когда требуется перемещать шток ИМ на большое расстояние h (0 < h < 300 мм) и/или с большим перестановочным усилием.
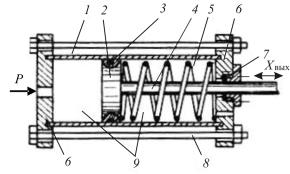
Принципиальная схема ППИМ приведена на рис. 1.15.
Рис. 1.15. Принципиальная схема ППИМ: 1 – цилиндр; 2 – поршень; 3 – уплотнительные кольца; 4 – шток; 5 – возвратная пружина; 6 – крышки; 7 – уплотнения; 8 – шпильки; 9 – полости цилиндра
РаботаППИМ аналогична работеМПИМ и понятна изрисунка. Исполнительный механизм, не имеющий возвратной пружины, где возврат поршня в исходное положение осуществляется подачей воздушной среды в противоположную полость, называется двухходовым. Пневмоцилиндры этого типа нашли наибольшее
применение в промышленности.
Для повышения точности и улучшения динамических характеристик поршневые приводы по аналогии с мембранными снаб-
47

жают пневматическими позиционерами (электропневматическими позиционерами), а сами приводы называют следящими.
Поворотные пневматические приводы типа ППР предназна-
чены для управления трубопроводной арматурой (краны шаровые и пробковые, затворы дисковые и шиберные и т.п.) при аналоговом или дискретном управлении положением запорного элемента, когда управляющее воздействие на шток запорного элемента требует поворотного воздействия или приложения к нему вращательного момента.
Поворотные пневматические приводы для ЗРА могут рассматриваться как некоторая разновидность поршневого пневматического привода, где поршень, выполненный в виде лепестка, перемещается под давлением управляющего воздуха в специальной камере. Движение силового элемента (лепестка) пневмопривода непосредственно передается на вал запорного элемента трубопроводной арматуры, обеспечивая его требуемое положение. Применяются также в автоматических манипуляторах и загрузочных устройствах с углом поворота до 360° и крутящим моментом до
20 кН·м.
Внешний вид поворотного пневматического привода представлен на рис. 1.16.
Рис. 1.16. Пневмопривод лопастной типа ППР
48
Основные технические характеристики поворотного пневматического привода следующие:
–давление сжатого воздуха питания пневмопривода 0,25– 0,6 МПа;
–расход воздуха в установившемся режиме при давлении
сжатого воздуха питания 0,6 МПа и температуре сжатого воздуха
10–40 °С – не более 0,5 м3/ч;
–время поворота выходного вала из одного крайнего положения в другое при номинальной нагрузке – не более 3 с.
Поворотные пневматические приводы могут оснащаться дополнительными блоками, обеспечивающими аналоговое или дискретное управление, а также сигнализацию положения вала. Взрывозащищенные блоки имеют взрывозащиту вида «взрывонепроницаемая оболочка».
1.2.4. Гидравлические исполнительные механизмы
Гидравлические исполнительные механизмы (ГИМ) являются неотъемлемой и основной конструктивной частью гидравлического привода (гидропривода), включающего помимо ГИМ гидробак, гидронасос, гидрораспределитель и другие устройства. Приводным двигателем гидронасоса могут быть электродвигатель, дизель
идругие двигатели, поэтому иногда гидропривод называют соответственно электронасосным, дизельнасосным и т.д.
Основное назначение гидропривода – преобразование гидравлической энергии в соответствии с требованиями нагрузки (величины статической нагрузки, преобразование вида движения выходного звена ГИМ и др.), а также регулирование, защита от перегрузок и т.п.
Гидроприводы могут быть двух типов: гидродинамические
иобъемные. В гидродинамических приводах используется в основном кинетическая энергия потока жидкости. В объемных гидроприводах используется потенциальная энергия давления рабочей жидкости.
49
Широкое распространение в настоящее время получил объемный гидропривод. Под объемным гидроприводом понимается совокупность объемных гидромашин, гидроаппаратуры и других устройств, предназначенных для передачи механической энергии и преобразования движения посредством рабочей жидкости.
Объемной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении ее из рабочей камеры. К объемным машинам относят, например, поршневые насосы, аксиально-поршневые, ра- диально-поршневые, шестеренные гидромашины и др.
Одна из особенностей, отличающая объемный гидропривод от гидродинамического, – высокие значения давления в гидросистемах. Так, номинальные значения давления в гидросистемах экскаваторов могут достигать 32 МПа, а в некоторых случаях рабочее давление может быть более 300 МПа. Объемный гидропривод применяется преимущественно в горных и строительно-дорожных машинах.
В зависимости от конструкции и типа входящих в состав гидропередачи элементов объемные гидроприводы можно классифицировать по следующим признакам.
По характеру движения выходного звена ГИМ:
–гидропривод вращательного движения, когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус ГИМ) совершает неограниченное вращательное движение;
–гидропривод поступательного движения, у которого в каче-
стве ГИМ применяется гидроцилиндр – двигатель с возвратнопоступательным движением ведомого звена (штока поршня, плунжера или корпуса);
–гидропривод поворотного движения, когда в качестве ГИМ применен поворотный гидроцилиндр, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 360°.
50