

книги / Теория механизмов и машин задания, упражнения и задачи к курсовому проекту
..pdfЗАДАНИЕ № 14
Тема проекта. Кинематическое и динамическое исследование механизмов качающегося грохот-конвейера
Кинематическая схема
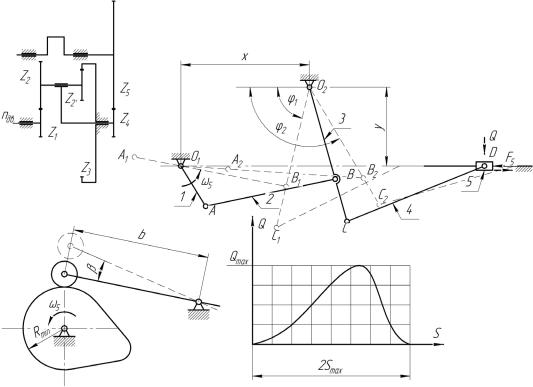
Качающийся грохот предназначен для сортировки кускового материала (руды, угля и т.д.) и может служить также конвейером для перемещения материала в горизонтальном направлении (рисунок к заданию; исходные данные к заданию приведены в таблице).
Кривошип 1 получает движение от электродвигателя через редуктор. От кривошипа через звено 2 коромысло 3 получает колебательное движение относительно 3, через шатун 4 сообщает ползуну 5 возвратно-поступатель- ное движение. С ползуном 5 жестко связан лоток (не показан на рисунке). Материал должен перемещаться по лотку все время в одну сторону. В лоток материал подается специальными питателями с приводом от кулачка, схема которого приведена в задании.
Содержание и последовательность выполнения проекта
I.Структурное и кинематическое исследование рычажного механизма
1.Произвести структурный анализ стержневого механизма, состоящего из звеньев 1, 2, 3, 4, 5.
2.Построить положения звеньев, соответствующие крайнему правому
икрайнему левому положению ползуна 5. Определить графически длины звеньев 1 и 2. Одно из крайних положений, соответствующее началу рабочего хода, взять для дальнейших расчетов в качестве начального.
3.По полученным значениям размеров звеньев механизма проверить существование кривошипно-коромыслового механизма.
4.Построить схему механизма в 12 положениях и определить графически траекторию движения центра тяжести звена 2. Схема механизма должна занимать 1/5 листа формата А1.
5.Определить в полученных положениях построением планов скорости
иускорения всех характерных точек механизма.
6.Определить графическим способом в 12 положениях механизма перемещение, путь, скорость и ускорение звена 5 в функции угла поворота кривошипа или времени. График перемещения и пути построить в одной системе координат. В пояснительной записке необходимо привести значения скоростей и ускорений, определенных как графическим способом, так и из планов.
111
7.Построить графики изменения угловой скорости и ускорения центра тяжести звена 2 по углу поворота кривошипа.
8.Построить годографы скорости и ускорения центра тяжести звена 2.
II.Профилирование кулачка
1.По заданному закону движения (данному в задании в виде графика зависимости ускорения от угла поворота кулачка) определить наименьший радиус дискового кулачка. Максимальный угол давления взять в пределах
40–50°.
2.Построить теоретический и практический профиль кулачка, выбрав радиус ролика толкателя.
3.Построить график изменения угла давления по углу поворота кулачка. III. Проектирование зубчатой передачи
1.По заданному числу оборотов кривошипа и двигателя подобрать числа зубьев шестерен редуктора z4 и z5, показанного на схеме, и подсчитать передаточное число редуктора. Отклонение от заданного nкр до 3 %.
2.Рассчитать размеры эвольвентного зацепления корригированных цилиндрических зубчатых колес z4 и z5. Применить неравносмещенное зацепление. Рассчитать размеры и построить картину зацепления малого колеса z4 в зацеплении с инструментальной рейкой, без смещения и при смещении рейки.
3.Рассчитать размеры и построить картину зацепления колес z4 и z5 при модуле, равном 6 мм.
4.Построить рабочие участки профилей, дугу зацепления и определить коэффициент перекрытия.
5.Построить эпюры относительных скольжений профилей.
IV. Силовой расчет механизма
1.В одном из рабочих положений механизма построением планов сил определить силы реакций во всех кинематических парах и уравновешивающий момент на начальном звене. Положение механизма выбирать по графику так, чтобы сила сопротивления была в этом положении наибольшей.
2.Определить способом жесткого рычага Жуковского уравновешивающий момент на начальном звене рычажного механизма. Расхождение в полученных результатах при определении уравновешивающего момента планом сил и способом жесткого рычага Жуковского не должно превышать 2–3 %.
112
V.Определение момента инерции маховика и его размеров
1.Определить приведенные к валу кривошипа моменты от сил сопротивления с учетом весов звеньев. Построить график изменения приведенного момента по углу поворота кривошипа, значения сил сопротивления при определении брать из графика сил. Приведенный момент инерции редуктора принять 1,5 кг м2.
2.Методом графического интегрирования графика приведенного момента сил сопротивления построить график работы сил сопротивления.
3.Построить график работы движущих сил, считая момент движущих сил постоянным для данного периода установившегося движения.
4.Построить график избыточных работ (кинетической энергии) по углу поворота кривошипа.
5.Определить приведенные к валу кривошипа моменты инерции для 12 положений механизма и построить график.
6.Построить диаграмму избыточных работ в функции приведенного момента инерции (диаграмма энергомасс). С помощью этой диаграммы определить момент инерции маховика, который должен быть посажен на вал
кривошипа для обеспечения заданной неравномерности хода машины .
7.Определить основные размеры маховика.
8.Определить потребную мощность электродвигателя для привода машины, если коэффициент полезного действия принять 0,5–0,6.
Рис. Схема для исследования механизмов
113
Исходные данные к заданию № 14
|
Параметр |
Обозна- |
|
|
|
|
|
|
Вариант |
|
|
|
|
|
|
|
|
|
||
|
чение |
|
1 |
2 |
|
3 |
4 |
5 |
6 |
7 |
|
8 |
9 |
|
|
10 |
||||
|
|
|
|
|
|
|
|
|||||||||||||
|
Число оборо- |
nдв |
|
1440 |
1440 |
|
1440 |
1440 |
1440 |
1440 |
1440 |
|
1440 |
1440 |
|
|
1440 |
|||
|
тов, об/мин |
nOА |
|
70 |
80 |
|
85 |
75 |
90 |
65 |
80 |
|
70 |
85 |
|
|
90 |
|||
|
|
|
Х, мм |
|
270 |
290 |
|
310 |
320 |
350 |
330 |
280 |
|
360 |
270 |
|
|
320 |
||
|
Размеры |
Y, мм |
|
210 |
225 |
|
230 |
250 |
220 |
240 |
200 |
|
230 |
220 |
|
|
250 |
|||
|
O2С, мм |
|
320 |
340 |
|
360 |
370 |
400 |
375 |
330 |
|
390 |
350 |
|
|
380 |
||||
|
звеньев |
|
|
|
|
|
||||||||||||||
|
О2В: О2С |
|
0,8 |
0,75 |
|
0,8 |
0,85 |
0,75 |
0,7 |
0,85 |
|
0,7 |
0,75 |
|
|
0,8 |
||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
СD: О2С |
|
2,5 |
2,8 |
|
2,7 |
2,6 |
2,5 |
2,3 |
3,0 |
|
2,5 |
2,8 |
|
|
2,4 |
||
|
Углы, опреде- |
1 |
|
60 |
70 |
|
65 |
60 |
55 |
70 |
55 |
|
75 |
50 |
|
|
65 |
|||
|
ляющие край- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ние положения |
2 |
|
120 |
110 |
|
115 |
120 |
125 |
130 |
110 |
|
130 |
115 |
|
|
125 |
||||
|
коромысла, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон движе- |
= f ( ) |
|
параб. |
cos |
параб. |
cos |
параб. |
sin |
cos |
sin |
параб. |
|
cos |
||||||
|
ния коромысла |
|
|
|||||||||||||||||
|
Длина и угол |
l, мм |
|
120 |
120 |
|
130 |
130 |
140 |
130 |
140 |
|
130 |
150 |
|
|
150 |
|||
|
качания коро- |
max, |
|
14 |
16 |
|
14 |
16 |
15 |
15 |
14 |
|
16 |
18 |
|
|
20 |
|||
|
|
мысла |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фазовые |
у + дс + |
|
220 |
230 |
|
240 |
250 |
210 |
290 |
270 |
|
230 |
260 |
|
|
280 |
|||
|
|
углы, |
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у: дс: п |
|
5:3:4 |
5:1:4 |
|
4:2:3 |
4:4:5 |
5:2:3 |
3:4:3 |
6:2:5 |
|
4:3:3 |
3:2:5 |
|
|
4:1:3 |
|||
|
|
|
|
|
|
|
|
|||||||||||||
|
Число зубьев |
z1 |
|
12 |
12 |
|
13 |
11 |
15 |
14 |
13 |
|
11 |
12 |
|
|
13 |
|||
|
z2 |
|
18 |
19 |
|
20 |
18 |
19 |
20 |
17 |
|
20 |
20 |
|
|
19 |
||||
|
и модули |
z2 |
|
14 |
11 |
|
|
11 |
14 |
12 |
11 |
|
12 |
13 |
|
|
14 |
|||
|
|
|
z3 |
|
44 |
42 |
|
45 |
40 |
48 |
46 |
41 |
|
43 |
45 |
|
|
46 |
||
|
|
Для z4 и z5 m2, мм |
|
13 |
12 |
|
10 |
11 |
14 |
11 |
10 |
|
13 |
12 |
|
|
11 |
|||
|
Угол зацепле- |
, |
|
20 |
20 |
|
20 |
20 |
20 |
20 |
20 |
|
20 |
20 |
|
|
20 |
|||
|
ния рейки |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Коэффициент |
С* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
радиального |
|
0,3 |
0,3 |
|
0,3 |
0,3 |
0,3 |
0,3 |
0,3 |
|
0,3 |
0,3 |
|
|
0,3 |
||||
|
|
зазора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нагрузка, Н |
F |
|
4500 |
4000 |
4300 |
3500 |
4500 |
4200 |
3200 |
|
4000 |
3500 |
|
|
4200 |
||||
|
Моменты |
I2 |
|
0,065 |
0,055 |
0,078 |
0,094 |
0,092 |
0,063 |
0,068 |
|
0,057 |
0,058 |
|
0,094 |
|||||
|
I3 |
|
0,135 |
0,170 |
0,205 |
0,210 |
0,204 |
0,202 |
0,132 |
|
0,204 |
0,182 |
|
0,185 |
||||||
|
инерции, кг м2 |
|
|
|
||||||||||||||||
I4 |
|
1,60 |
|
2,40 |
2,52 |
2,30 |
1,90 |
2,36 |
|
2,48 |
2,60 |
|
|
2,05 |
||||||
|
|
|
|
2,20 |
|
|
|
|
||||||||||||
|
Коэффициент |
f |
|
0,25 |
0,3 |
|
0,28 |
0,35 |
0,25 |
0,2 |
0,3 |
|
0,35 |
0,28 |
|
|
0,35 |
|||
|
|
трения |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G1 |
|
40 |
30 |
|
35 |
50 |
50 |
40 |
45 |
|
45 |
35 |
|
|
30 |
||
|
|
Веса |
G2 |
|
95 |
100 |
|
110 |
110 |
100 |
110 |
100 |
|
90 |
100 |
|
|
120 |
||
|
|
G3 |
|
160 |
175 |
|
180 |
180 |
150 |
170 |
150 |
|
160 |
175 |
|
|
150 |
|||
|
звеньев, Н |
|
|
|
|
|
||||||||||||||
|
G4 |
|
290 |
290 |
|
300 |
320 |
280 |
300 |
280 |
|
310 |
320 |
|
|
280 |
||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
G5 |
|
460 |
420 |
|
520 |
600 |
440 |
480 |
500 |
|
450 |
420 |
|
|
460 |
||
|
Коэффициент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
неравно- |
|
|
1/20 |
1/15 |
|
1/15 |
1/20 |
1/10 |
1/15 |
1/20 |
|
1/10 |
1/10 |
|
|
1/14 |
|||
|
мерности хода |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П р и м е ч а н и е . |
Для всех |
вариантов: |
– O1S 0,65; |
|
AS2 |
|
0,6; |
|
O2S3 |
|
0,7; |
|||||||
|
|
|
|
|||||||||||||||||
|
AB |
|
O C |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
O A |
|
|
|
|
|
|
||||
|
CS4 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
0,6. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
114
СПИСОК ЛИТЕРАТУРЫ
1.Теория механизмов и механика машин: учеб. для вузов / К.В. Фролов, С.А. Попов, А.К. Мусатов [и др.]; под ред. К.В. Фролова. – М.: Высш. шк., 2002. – 662 с.
2.Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин. – М.: Высш. шк., 2004. – 458 с.
3.Теория механизмов и машин. Курсовое проектирование: учеб. пособие для вузов / В.В. Кузенков [и др.]. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2012. – 170 с.
4.Кобитянский А.Е. Анализ и синтез плоских кулачковых механизмов: учеб. пособие. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2012. – 119 с.
5.Кобитянский А.Е., Шафранов А.В. Теория механизмов и машин: консп. лекций. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2017. –
Ч. 1. – 137 с.
6.Кобитянский А.Е., Шафранов А.В. Теория механизмов и машин: консп. лекций. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2018. –
Ч. 2. – 232 с.
7.Шафранов А.В. Структурный анализ механизмов: учеб. пособие. − Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2017. − 69 с.
8.Кобитянский А.Е., Шафранов А.В. Теория механизмов и машин: лабораторный практикум. – Пермь: Изд-во Перм. нац. исслед. политех. ун-та, 2020. – 144 с.
115

Учебное издание
Кобитянский Алексей Ефимович, Шафранов Алексей Владимирович
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН: ЗАДАНИЯ, УПРАЖНЕНИЯ И ЗАДАЧИ К КУРСОВОМУ ПРОЕКТУ
Учебно-методическое пособие
Редактор и корректор М.Н. Афанасьева
Подписано в печать 31.07.2020. Формат 60 90/8. Усл. печ. л. 14,5. Тираж 38 экз. Заказ 31б/2020.
Издательство Пермского национального исследовательского
политехнического университета.
Адрес: 614990, г. Пермь, Комсомольский пр., 29, к. 113.
Тел.: + 7 (342) 219-80-33.