

книги / Автоматизация в электроэнергетике и электротехнике
..pdfдва участка транспортных систем пол- |
креплением 7 на грузовой платформе. |
номасштабных типоразмеров (в нату- |
Для фиксации тележки в направлении, |
ральную величину в соответствии с тех- |
поперечном движению, один рельс пути |
ническим заданием заказчика). Участки |
8 выполнен треугольной формы. |
систем созданы на массу тележек с гру- |
|
зом до 500 кг («большая» система) и до |
|
50 кг («малая» система). |
|
Для наглядности внешний вид уча- |
|
стков транспортных систем с грузовыми |
|
платформами схематично изображен на |
|
рис. 2. |
|
а б
Рис. 2. Схематичный внешний вид опытных образцов участков транспортных систем на основе комбинированных линейных асинхронных двигателей: 1 – грузовая платформа; 2 – короткое рабочее тело; 3 – двигательные блоки; 4 – тормозные блоки; 5 – рельсовые пути; 6 – элементы
для позиционирования тележек
Поперечный разрез «большой» транспортной системы схематично представлен на рис. 3. Рельсовый путь, тормозные блоки и элементы крепления индукторов ЛАД и тормозных блоков на рис. 3 не показаны.
Поперечный разрез «малой» транспортной системы изображен на рис. 4, где грузонесущая поверхность тележки 6 с помощью болтовых соединений 1–3 сочленяется со стойками 9, 11 и с опорными подшипниками качения 10. Болтыстойки индукторов 4 служат для крепления их в путевой структуре и для регулировки воздушного зазора между неподвижными индукторами 5 и подвижным рабочим телом, закрепленным
Рис. 3. Схематичный вид поперечного разреза транспортной тележки на суммарный груз массой до 500 кг: 1 – неподвижные индукторы ЛАД; 2 – биметаллическое рабочее тело ЛАД; 3 – стойка для крепления рабочего тела к тележке; 4–6 – конструктивные элементы для крепления рабочего тела и регулирования воздушного зазора; 7, 8 – конструктивные элементы тележки;
9 – опорные катки
Рис. 4. Схематичный вид поперечного разреза транспортной системы на груз массой до 50 кг
На тележки также крепятся демпфированные захваты позиционирующих устройств оригинальной конструкции, фиксирующие штоки которых подаются индукторами цилиндрических ЛАД, не-
131
подвижно установленными на точках остановки. Конструкция этих ЛАД здесь не приводится, так как представляет предмет отдельного рассмотрения.
Между индукторными модулями 3 ЛАД (см. рис. 2) установлены тормозные блоки 4, выполненные на основе постоянных магнитов. Тележки 1 имеют короткие биметаллические (или иной конструкции) вторичные рабочие тела ЛАД.
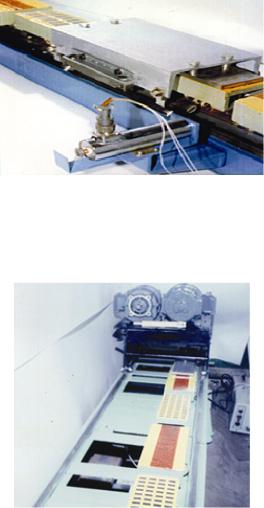
Внешний вид лабораторных участков транспортных систем на основе изготовленных для экспериментальной проверки полномасштабных индукторов и тормозных блоков КЛАД показан на рис. 5, 6.
Рис. 5. Полноразмерная экспериментальная установка на основе комбинированных асинхронных двигателей для роботизированных комплексов в герметичных камерах («малая» транспортная система) с позиционирующим устройством
Рис. 6. Лабораторная полномасштабная установка для исследования комбинированных линейных двигателей роботизированных комплексов в герметичных камерах («большая» транспортная система)
132
Экспериментальные исследования линейных электроприводов перемещения и фиксации тележек транспортных систем в герметичных камерах
Проведенные электромеханические и тепловые экспериментальные исследования опытных полномасштабных участков транспортных систем на основе разработанных КЛАД, показанных на рис. 5, 6, полностью подтвердили их работоспособность и соответствие поставленным техническим требованиям по тяговым и энергетическим характеристикам.
С целью определения эффективности тормозных блоков, выполненных на базе постоянных магнитов, проведены замеры скоростей тележки транспортных систем как с тормозными блоками, установленными вдоль экспериментальной трассы, так и без них. На тележки помещались грузы массой, указанной в техническом задании. Время прохождения выбранного участка пути фиксировалось с помощью точного ручного секундомера.
Для повышения точности измерения время прохождения отрезка трассы, как при прямом, так и при обратном направлении движения тележек, замерялось три раза (что исключало влияние на параметры движения возможной асимметрии путевой структуры), а затем определялись средние значения времени.
В качестве примера в таблице представлены результаты измерений и обработки данных эксперимента для «большой» транспортной системы.
Анализ этих результатов показывает, что уменьшение скорости тележки за счет тормозных блоков составило в среднем 40 %, что доказывает высокую эффективность их действия.
На рис. 7 представлены результаты экспериментальных исследований влия-
Результаты экспериментальных исследований КЛАД
Движение |
|
|
Время прохождения трассы, с |
Средняя |
|||
|
|
|
Среднее при |
|
Усредненное |
||
1-й |
2-й |
3-й |
|
скорость |
|||
тележки |
движении в одном |
|
для обоих направле- |
тележки, м/с |
|||
|
замер |
замер |
замер |
направлении |
|
ний движения |
|
С тормозными |
|
|
|
|
|
|
|
блоками: |
|
|
|
|
|
|
|
вперед |
4,3 |
4,3 |
4,4 |
4,33 |
|
4,08 |
0,26 |
назад |
3,8 |
3,9 |
3,8 |
3,83 |
|
|
|
Без тормозных |
|
|
|
|
|
|
|
блоков: |
|
|
|
|
|
|
|
вперед |
2,8 |
2,8 |
2,8 |
2,80 |
|
2,74 |
0,36 |
назад |
2,6 |
2,8 |
2,6 |
2,67 |
|
|
|
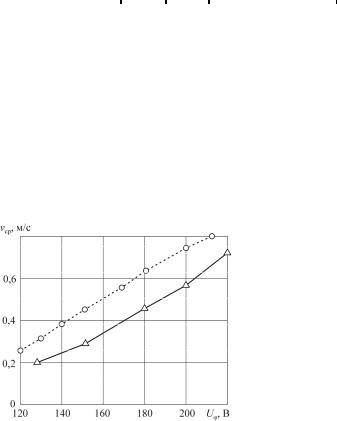
Рис. 7. Зависимости скоростей движения тележек v (м/с) транспортных систем от величины питающего индукторы КЛАД напряжения U(B):
— – «большая» система; ---- – «малая» система
ния величины напряжения питания, подводимого к индукторам тяговых ЛАД «малой» и «большой» транспортных систем, на скорость движения тележек с грузом
Из анализа кривой v = f(U) для «большой» системы следует, что зависимость эта нелинейна, особенно на начальном участке при небольших напряжениях. Эта нелинейность обусловлена тем, что при трогании с места (и малых скоростях движения) на тележку воздействует дополнительное усилие сопротивления трения при начале движения. На покрытие этого усилия требуется дополнительное тяговое усилие линейного двигателя, т.е. необходимо дополнительное увеличение питающего напря-
жения для увеличения тока индукторов двигательных блоков ЛАД.
Для «малой» системы явление нелинейности скоростной характеристики практически не наблюдается, так как качество технологического исполнения путевых рельсов и опор качения тележки значительно меньшей массы в этой системе были значительно выше, а следовательно, силы трения существенно меньше.
Заключение
В целом проведенные лабораторные исследования (которые были подтверждены при внедрении системы в производственных условиях) убедительно доказали, что предложенные транспортные системы на основе КЛАД позволили получить необходимые по техническому заданию низкие скорости движения тележек (0,2–0,8 м/с) при питании индукторов от стандартной трехфазной питающей сети 380/220/127 В частотой 50 Гц. При этом ЛЭП системы получается очень простым, недорогим и надежным в эксплуатации, так как не требуется какаялибо сложная система управления двигателем или преобразователь частоты.
Нужен только простейший пускатель «вперед–стоп–назад», что в исключительной степени упрощает систему
133
и повышает надежность робототехниче- |
жен авторский слайд-курс лекций на |
|||||||||||||
ских комплексов, при работе, например, |
русском или английском языке объемом |
|||||||||||||
в условиях вакуума, токсичных, радио- |
8–16 ч (лектор В.В. Тиунов). Данный |
|||||||||||||
активных или иных подобных сред, а |
курс содержит более 600 страниц и ил- |
|||||||||||||
также при работе в обычных условиях, |
люстраций в виде PPt-презентаций и |
|||||||||||||
когда от электропривода перемещения |
может быть эффективно использован как |
|||||||||||||
тележек требуется максимальная про- |
спецкурс для |
студентов, магистрантов |
||||||||||||
стота управления и особо высокая на- |
и аспирантов соответствующих специ- |
|||||||||||||
дежность. |
|
|
|
|
|
альностей, а также для слушателей сис- |
||||||||
В соответствии с изложенным автор |
темы повышения квалификации. Курс |
|||||||||||||
готов рассмотреть предложения заинте- |
или его фрагменты по приглашению чи- |
|||||||||||||
ресованных организаций и лиц о разра- |
тались |
автором |
на |
английском языке |
||||||||||
ботке подобных или других линейных |
и получили одобрение в Австрии (Вена, |
|||||||||||||
или иных электроприводов. Возможна |
Линц), в Испании (Валлодолид), Китае |
|||||||||||||
также передача на договорной основе по |
(Пекин, Харбин, Фушунь, Шеньян), |
|||||||||||||
принципу «как есть» уже разработанных |
США (Лос-Анджелес, Нотридж, Фул- |
|||||||||||||
образцов двигателей для транспортных |
лертон, Помона, |
Лонг |
Бич), |
а также |
||||||||||
или иных систем с индукционными |
в России. |
|
|
|
|
|
|
|||||||
электрическими машинами |
нетрадици- |
Для магистрантов, аспирантов и |
||||||||||||
онной конструкции и исполнения. |
|
всех желающих могут быть также про- |
||||||||||||
В частности, могут быть рассмотре- |
ведены занятия по авторскому учебному |
|||||||||||||
ны предложения о разработке и поставке |
курсу: «Профессиональный технический |
|||||||||||||
плоских, цилиндрических, седлообраз- |
английский язык» (со специализацией |
|||||||||||||
ных, дугостаторных, торцевых или иных |
для электромехаников) с выдачей слу- |
|||||||||||||
двигателей с вторичными |
элементами |
шателям обширного электронного кейса |
||||||||||||
различных конструкций, в том числе |
обучающей документации, в том числе |
|||||||||||||
сочлененных |
с |
рабочими |
органами |
подготовленной по эффективной билин- |
||||||||||
приводимых в движение установок и |
гвальной технологии и с использованием |
|||||||||||||
систем. Часть из этих двигателей разра- |
весьма удобного для самообучения ви- |
|||||||||||||
ботаны для питания от однофазной или |
деозвукового компьютерного сопровож- |
|||||||||||||
двухфазной |
сети |
переменного |
тока, |
дения в режиме «Караоке» [3–6]. |
||||||||||
в отличие от традиционного питания |
|
Список литературы |
|
|||||||||||
двигателей от трехфазной сети. Краткое |
|
|
||||||||||||
описание и |
параметры разработанных |
1. Тиунов |
В.В. |
Электромагнитные |
||||||||||
двигателей представлены в информаци- |
||||||||||||||
поля, характеристики и практические |
||||||||||||||
онном листке1. |
|
|
|
|
||||||||||
Для тех, кто заинтересован в более |
структуры линейных асинхронных ма- |
|||||||||||||
шин с коротким рабочим телом // Акта |
||||||||||||||
детальной информации по теории, мето- |
Техника: тр. Чеш. |
академии |
наук. – |
|||||||||||
дикам расчетов и конструкциям разрабо- |
2014. – Т. 59, № 2. – С. 115–134. |
|
||||||||||||
танных двигателей, может быть предло- |
|
|||||||||||||
2. Tiunov |
V.V. |
Technical |
English: |
|||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
E-learning slide-course (Based on the text- |
|||||||||||
1 Тиунов |
В.В. Индукционные электриче- |
|||||||||||||
ские машины с разомкнутым магнитопроводом |
books by D. Bonami, 2008, Pearson Educa- |
|||||||||||||
(линейные и другие специальные типы электро- |
tion Limited, UK, |
parts |
1-4), |
Manuscript, |
||||||||||
двигателей). Информационный листок. |
Руко- |
Electronic Resource. – |
Perm: Perm Na- |
|||||||||||
пись. 2 с. Пермский национальный исследова- |
||||||||||||||
tional |
Research |
Polytechnic |
University, |
|||||||||||
тельский политехнический университет, |
Пермь, |
|||||||||||||
июнь 2014.
134
2009 (with a newly developed video-sound |
сберегающих |
электротехнологий |
– |
|||||
application as “Karaoke” and with many |
AПЭЭТ-2014: сб. науч. тр. III Междунар. |
|||||||
other newly developed video applications). |
науч.-техн. конф., Екатеринбург, 17– |
|||||||
3. Тиунов В.В. Практическая реали- |
20 марта 2014 г. – Екатеринбург: Изд-во |
|||||||
зация англоязычной |
профессиональной |
Урал. федер. ун-та им. первого Прези- |
||||||
подготовки |
магистрантов-электроме- |
дента |
России |
Б.Н. Ельцина, |
2014. |
– |
||
хаников |
// |
Актуальные проблемы |
С. 262–265. |
|
|
|
||
энергосберегающих |
электротехнологий |
5. Тиунов |
В.В. Прогрессивная анг- |
|||||
AПЭЭТ–2014: сб. науч. тр. III Между- |
лоязычная профессиональная подготовка |
|||||||
нар. науч.-техн. конф., Екатеринбург, |
магистрантов по направлению «Элек- |
|||||||
17–20 марта 2014 г. – Екатеринбург: |
троэнергетика и электротехника» (на |
|||||||
Изд-во Урал. федер. ун-та им. первого |
англ. языке) // Инновационная энергети- |
|||||||
Президента России Б.Н. Ельцина, 2014. – |
ка: сб. науч. тр. Рос.-Китайск. науч.-техн. |
|||||||
С. 259–262. |
|
|
конф. Ассоциации техн. ун-тов России и |
|||||
4. Тиунов В.В., Чикаренко С.К. Анг- |
Китая – АТУРК-2015, Пермь, 29 июня – |
|||||||
ло-русский тезаурус и электронный |
03 июля 2015. – Пермь: Изд-во Перм. |
|||||||
интерактивный словарь по электромеха- |
нац. |
исслед. |
политехн. ун-та, |
2015. – |
||||
нике // |
Актуальные |
проблемы энерго- |
С. 134–138. |
|
|
|
||
135
УДК 621.313
АНАЛИЗ ПУСКОВЫХ РЕЖИМОВ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА НАГНЕТАТЕЛЯ RC 4A-3N-95
А.М. Зюзев1, В.П. Метельков1, Д.А. Яшин2
1 Уральский федеральный университет им. первого Президента России Б.Н. Ельцина, Екатеринбург
2 ОАО «Соликамскбумпром», Соликамск
Посвящено исследованию пусковых режимов высокоинерционного асинхронного электропривода с тиристорным преобразователем напряжения. Для таких приводов процесс пуска может сопровождаться перегревом обмоток двигателя. В работе оцениваются возможности снижения перегрева обмоток. Показано, что посредством подбора величины уставки токоограничения проблема перегрева обмотки ротора не может быть решена.
Ключевые слова: асинхронный двигатель, обмотка ротора, тепловая схема, термодинамическая модель, тиристорный преобразователь напряжения.
ANALYSIS OF START-UP MODES OF ASYNCHRONOUS ELECTRIC DRIVE
FOR SUPERCHARGER RC4A-3N-95
A.M. Ziuzev1, V.P. Metelkov1, D.A. Yashin2
1 Ural Federal University named after the first President of Russia B.N. Yeltsin, Yekaterinburg 2 JSC Solikamskbumprom, Solikamsk
Paper is devoted to research of start-up modes of high inertia asynchronous drive with thyristor voltage converter. For such drives the start-up mode can be accompanied by overheating of the motor windings. In this paper we evaluated the possibility of reducing the rotor winding overheating. It has been shown that by adjusting the value of the current limit setting during starting the problem of the rotor winding overheating in the considered drive as a whole can not be solved.
Keywords: asynchronous motor, rotor winding, thermal lumped circuit, thermodynamic model, thyristor voltage converter.
Введение
Прямой пуск высоковольтного асинхронного двигателя сопровождается пусковыми токами, превышающими номинальный ток в 6–7 раз. Это вызывает просадки напряжения сети более допустимой величины и ударные моменты, снижающие надежность механической части привода. Частичное решение этих проблем может быть достигнуто за счет использования устройств плавного пуска (УПП) на основе тиристорных преобразователей напряжения (ТПН), однако их применение может приводить к перегреву обмоток машины и выходу ее из строя.
Предметом исследования является асинхронный электропривод многосту-
пенчатого нагнетателя типа RC 4A-3N-95 фирмы MAN TURBO AG, работающего на производстве ОАО «Соликамскбумпром». Нагнетатель оснащен асинхронным двигателем АДЧР-1600 (1600 кВт, 1500 об/мин). Запуск двигателя осуществляется от ТПН с последующим переключением на сеть. Электропривод имеет значительный момент инерции, что приводит к достаточно длительной работе (порядка 35 с) при больших скольжениях во время пуска и сильному нагреву роторной обмотки, в результате которого может происходить ее повреждение. На рис. 1 показаны последствия перегрева ротора этого двигателя (фото предоставлены ОАО «Соликамскбумпром»).
136
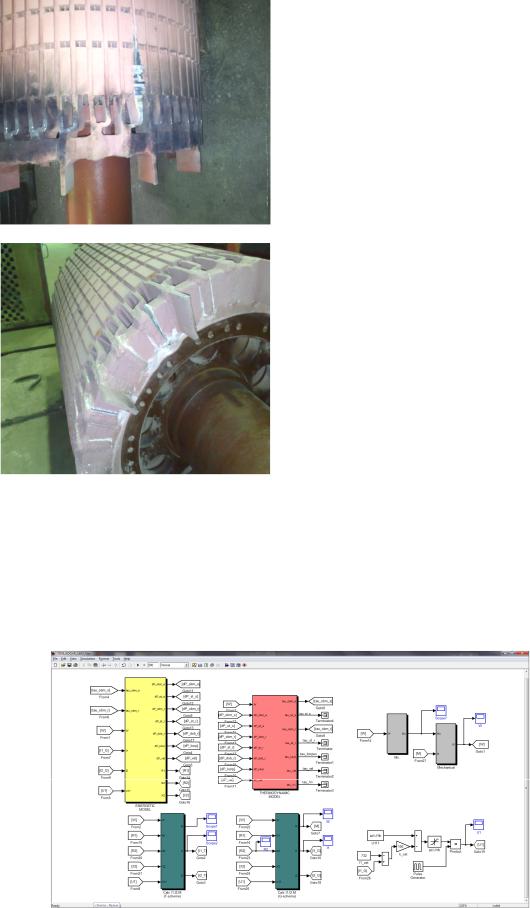
Рис. 1. Выход стержня ротора двигателя АДЧР-1600 из паза (слева) и повреждение короткозамыкающего кольца (справа)
В работе ставятся следующие задачи:
– создание комплексной модели асинхронного электропривода нагнетателя, учитывающей особенности нагрева
двигателя и особенности взаимовлияния элементов силового канала – двигателя, ТПН с системой управления и сети;
–исследование нагрева обмотки ротора двигателя при пуске от УПП и возможностей его снижения;
–исследование влияния пусковых процессов на просадку напряжения сети
ипути его снижения.
Оценка влияния пусковых процессов на просадку напряжения сети с помощью комплексной модели электропривода рассматривалась в работе [1], поэтому здесь затронем только термодинамический аспект проблемы.
Комплексная модель электропривода
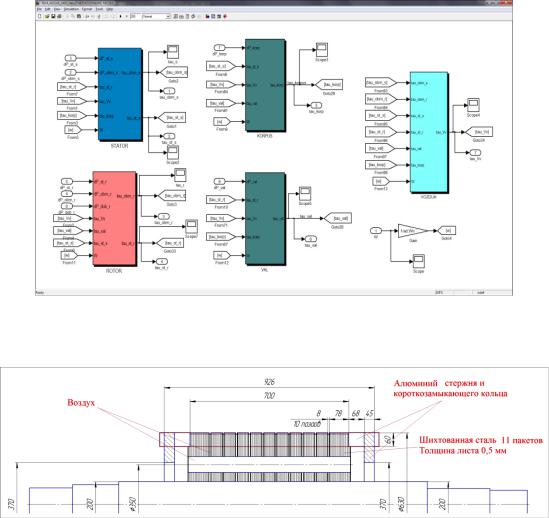
Исследования проводились с помощью одной из модификаций комплексной модели асинхронного электропривода в MatLab/Simulink, созданной на кафедре ЭАПУ Уральского федерального университета [2]. Здесь под комплексной моделью понимается модель, включающая в себя подмодели всех элементов силового канала электропривода, системы автоматического управления и термодинамическую модель двигателя [3, 4]. На рис. 2 показан общий вид комплексной модели электропривода нагне-
тателя в MatLab/Simulink.
Рис. 2. Комплексная модель электропривода нагнетателя в MatLab/Simulink
137
Термодинамическая модель |
двига- |
в ней учитываются температурные зави- |
||
теля (рис. 3) построена на основе тепло- |
симости теплоемкости обмотки ротора и |
|||
вых схем с сосредоточенными парамет- |
сопротивлений обмоток статора и рото- |
|||
рами и содержит в общей сложности |
ра [5]. |
|||
71 узел. Сюда входят 23 узла, соответст- |
На рис. 4 и 5 изображены чертеж |
|||
вующие |
элементам обмотки |
ротора |
ротора и его термодинамическая модель. |
|
(11 участков, находящихся в пазах паке- |
В общем случае комплексная мо- |
|||
тов стали ротора, 10 участков в радиаль- |
дель предполагает использование пол- |
|||
ных воздушных каналах и два коротко- |
ной электродинамической модели двига- |
|||
замыкающих кольца) и 23 аналогичных |
теля, ТПН и сети. Однако в задачах, |
|||
узла обмотки статора, включая лобовые |
связанных c оценкой нагрева двигателя, |
|||
части. Также модель содержит 25 узлов, |
может быть использована более простая |
|||
соответствующих |
другим элементам |
и быстрая модель на основе регули- |
||
двигателя. Принимая во внимание зна- |
руемых по амплитуде источников сину- |
|||
чительный диапазон изменения темпе- |
соидальной ЭДС в фазах статора двига- |
|||
ратуры |
некоторых |
элементов |
модели, |
теля. |
Рис. 3. Термодинамическая модель двигателя АДЧР-1600
Рис. 4. Чертеж ротора
138
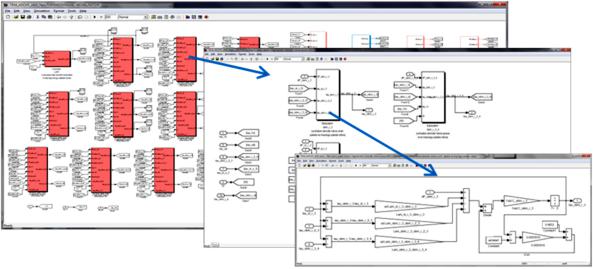
Рис. 5. Термодинамическая модель ротора
Результаты моделирования
Для верификации модели использовались результаты экспериментов, предоставленные ОАО «Соликамскбумпром» (рис. 6). На рис. 7 показаны процессы изменения температуры 23 узлов обмотки ротора и 23 узлов обмотки статора при пуске двигателя из холодного состояния. Моделирование выполнено для токов фаз двигателя, соответствующих экспериментальным значениям (см. рис. 6). Из рис. 7 следует, что для рассматриваемого двигателя нагрев обмотки статора не является критичным в пусковых режимах.
Отметим, что возможности экспериментально определить температуру наиболее нагретых участков обмотки ротора практически нет. Моделирование позволяет получить такую информацию. На рис. 8 представлено распределение максимумов температуры обмоток статора и ротора в аксиальном направлении (L) при пуске с уставкой токоограничения, соответствующей экспериментальным данным. Видно, что температура
распределена вдоль обмотки весьма неравномерно.
На рис. 9 показаны зависимости температуры наиболее нагретых точек
статора (θs max), ротора (θr max) и времени разгона (tstart), соответствующих разным величинам уставки ограничения тока (i*) в системе регулирования. Видно, что максимум температуры обмотки ротора слабо зависит от темпа разгона. Из этого следует, что вариацией длительности пуска проблему перегрева обмотки ротора двигателя рассматриваемого привода решить невозможно.
На рис. 10 и 11 показаны температуры узлов обмоток ротора (a) и статора (б) при повторном пуске. Здесь видно, что при пуске из нагретого состояния максимум температуры ротора превышает примерно на 50 °С максимум температуры при пуске из холодного состояния. Таким образом, выбор интервала ожидания для повторного пуска машины создает некоторые возможности для снижения влияния термического воздействия на обмотку ротора.
139
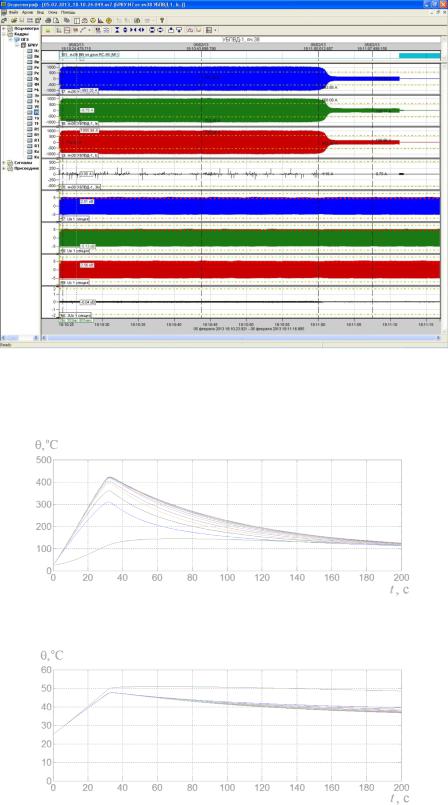
Рис. 6. Результаты эксперимента (вверху − токи фаз A, B, C;
внизу − напряжения фаз A, B, C)
а
б
Рис. 7. Температура узлов обмоток ротора (a) и статора (б) при пуске из холодного состояния
140