

книги / Электротехника и электроника
..pdf3.2.2. Ток и схема замещения обмотки ротора (одной фазы)
Схема замещения обмотки ротора приведена на рис. 3.18. Ток фазы обмотки ротора
I2 |
= |
E2 |
= |
|
E2 |
|
|
= |
|
E2k S |
|
|
|
= |
|
E2k |
|
|
|
. |
||||
Z2 |
R2 |
+ |
|
|
R2 |
+ ( X |
|
S ) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
X 2 |
|
2 |
2 |
|
R |
2 |
|
|
|
|
|||||||||||
|
|
|
|
2 |
|
2 S |
|
2 |
|
|
|
|
|
+ X 22 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
||
Сопротивление |
|
R2 |
|
разбиваем |
|
на два: |
|
|
R2 |
|
= R2 + |
|||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
||
+R2 1 − S .
S
I2 |
= |
|
E2k |
|
|
|
= |
|
|
|
|
E2k |
|
|
|
. |
|
|
R2 2 |
+ X |
2 |
|
|
|
|
R2 (1 − S ) 2 |
|
2 |
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
2 |
|
|
R |
+ |
|
|
+ X |
2 |
|
|||
|
|
|
|
|
|
||||||||||||
|
|
|
S |
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
Сопротивление |
|
R2 (1 − S ) |
|
учитывает |
преобразование |
||||||||||||
|
|
|
S |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
электрической энергии в механическую. Мощность тепловой энергии, выделяемой в этом сопротивлении, определяет механическую мощность на валу двигателя.
|
R2 |
X 2S |
|
R2 |
X 2 |
|
|
E 2 |
I 2 |
|
E 2k |
I 2 |
R |
2 |
1 − S |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
а |
|
б |
|
|
|
Рис. 3.18. Реальная схема замещения фазы обмотки ротора (а) и эквивалентная схема замещения одной фазы обмотки ротора (б)
81
Изменение I2 при разгоне двигателя: 1. n2 = 0 , S = 1 , I2 = (max ) .
2.n2 ↑ , S ↓ , I2 ↓ .
3.2.3.Уравнениенамагничивающихсил(НС) вАД
Намагничивающие силы статора I1w1m1K01 , соответственно
и ротора – I 2 w2 m2 K02 , где m1 , m2 – число фаз в статоре и роторе. В режиме холостого хода НС = m1 I 0 w1 K01 , под нагрузкой
НС = m1 I1w1K01 + m2 I 2 w2 K02 .
Как и в трансформаторе, магнитный поток Ф практически не зависит от нагрузки, поэтому уравнение намагничивающих сил АД будет иметь вид
m1 I 0 w1K01 = m1 I1w1K01 + m2 I 2 w2 K02 .
Пусть m1 = m2 , K01 = K02 =1 ,
тогда
I 0 w1 = I1w1 + I 2 w2 , |
I1 = I 0 |
− I 2 |
|
w2 |
|
, |
|||
|
w |
||||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
|
|
I '2 = − |
I 2 |
; I 1 = I 0 |
+ I '2 ; |
k = |
E1 |
. |
|||
|
|||||||||
|
|
||||||||
|
k |
|
|
E2k |
|||||
Ток холостого хода в АД I0 |
= 20...50 %Iном |
|
в отличие от I0 |
||||||
трансформатора, равного 5...10 %Iном .
3.2.4. Эквивалентная схема замещения АД (одной фазы)
Для рассмотрения схемы замещения АД воспользуемся Т-образной схемой замещения трансформатора (рис. 3.19).
В отличие от трансформатора здесь цепью R0 – X0 пренебречь нельзя. Поэтому для упрощения расчета используют Г-образ- нуюсхему замещения (рис. 3.20).
82
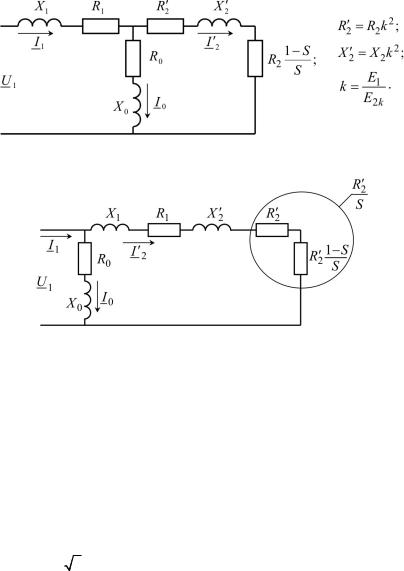
Рис. 3.19. Т-образная схема замещения фазы АД
Рис. 3.20. Г-образная схема замещения одной фазы АД
3.2.5. Потери мощности и КПД АД
Для определения КПД воспользуемся энергетической диа-
граммой передачи энергии в АД (рис. 3.21), где ∆ P = |
3I 2 R – |
||||||||||
потери на нагрев обмотки статора; ∆ |
|
об1 |
1 1 |
||||||||
Pст1 – потери в сердечнике |
|||||||||||
статора; ∆ P |
= |
3I 2 R |
– |
потери |
на |
нагрев обмотки |
ротора; |
||||
|
|
об |
2 |
2 2 |
|
|
|
|
|
|
|
∆ Pст2≈ 0 – потери в сердечнике ротора (очень малы, так как час- |
|||||||||||
тота тока в роторе мала); |
∆ Pмех – механические потери на трение |
||||||||||
и вентиляцию. |
|
|
|
|
|
|
|
||||
P1 = |
3U1I1 cos φ1 |
– мощность, подведенная к АД. |
|
||||||||
η= |
P2 |
= |
|
|
|
|
P2 |
|
|
; η = 70...90 %. |
|
|
|
|
+ ∆ P |
+ ∆ |
P + ∆ |
P+ ∆ |
|
||||
|
P P |
P |
|
||||||||
1 |
|
2 |
об1 |
ст1 |
об2 |
мех |
|
||||
|
|
|
|
|
|
|
|
|
|
|
83 |

Рис. 3.21. Энергетическая диаграмма
3.2.6. Момент, развиваемый АД
P = Mω. Электромагнитная мощность, создаваемая вращающимся магнитным полем, Pэл.м. = Mω0 ( ω0 – круговая частота вращения поля).
Развиваемая двигателем механическая мощность Pмех = Mω2 ( ω2 – круговая частотавращениявала двигателя).
Из энергетической диаграммы, пренебрегая ∆ Pст2 , имеем
P |
− P = ∆ P = |
3I 2 R . |
|
|
|
|
|
|
|
эл.м |
мех |
об2 |
2 2 |
|
|
|
|
|
|
|
M (ω0 − ω2 ) = 3I22 R2 ; M = |
3I22 R2 |
= |
3I22 R2 |
= |
∆ Pоб2 |
. |
||
|
|
|
|
||||||
|
|
|
|
ω0 − ω2 ω0 S |
ω0 S |
||||
Преобразуем формулу для момента, чтобы показать связь с законом электромагнитных сил:
∆ Pоб2= |
3I |
2 |
R2= |
3E2 I |
|
|
|
|
2 |
2 cos E2 I |
2 |
; |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3E2 I2 cos E2 I2 |
|
|
3E2k SI2 cos ψ2 |
|
3 4,44w2 f1K02 |
ФтI2 cos ψ2 |
|
|
M = |
|
|
|
= |
= |
; |
|||
ω0 S |
|
|
ω0 S |
ω0 |
|
||||
|
|
|
|
|
|
|
|||
84 |
|
|
|
|
|
|
|
|
|

M = CФтI2 cos ψ2 ,
где С – постоянный коэффициент, |
C = |
(3 4, 44 f1w2 K02 ) |
. Полу- |
|
|||
|
|
ω0 |
|
ченное выражение согласуется с законом Ампера.
3.2.7. Связь потерь вобмоткероторасоскольжением
|
M = |
|
∆ Pоб2 |
; |
Mω0 = |
∆ Pоб2 |
; |
|
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
ω0 S |
|
|
|
S |
|
|
|
|||
|
P |
∆ Pоб2 |
; |
∆ P = P |
S ; |
|
||||||||
|
|
|
||||||||||||
|
|
эл.м |
|
S |
|
|
|
об2 |
эл.м |
|
|
|
||
∆ Pоб2= |
Pэл.м− |
Pмех→ |
Pмех = Pэл.м (1 − S ). |
|||||||||||
Пусть n2 |
= 0 , |
тогда S =1, |
∆ Pоб2= |
Pэл.м , |
Pмех= 0 . Вся мощ- |
|||||||||
ность расходуется на нагрев обмоток. |
|
|
|
|
||||||||||
Если n ↑ |
S ↓ |
|
, ∆ |
P ↓ |
, |
P↑ . |
|
|
|
|||||
2 |
|
|
|
|
|
|
об2 |
|
мех |
|
|
|
|
|
Если S = 5 % , это |
значит, |
что |
5 % |
электромагнитной |
||||||||||
мощности расходуется на нагрев обмоток, а 95 % – на создание механической энергии.
3.2.8. Механическая характеристика АД (n = f (М))
Из схемы замещения (см. рис. 3.20) имеем
I2′ = |
|
|
|
U1ф |
|
|
|
; X1 + X 2′ = X k ; |
|
|
R′ 2 |
( X1 + X |
2′ ) |
2 |
|||
|
|
|
||||||
|
R1 |
+ |
2 |
+ |
|
|
||
|
|
|
||||||
|
|
|
S |
|
|
|
|
|
M = |
3I 2 R |
= |
3I ′2 R′ |
= |
|
2 2 |
2 2 |
||||
ω0 S |
ω0 S |
||||
|
|
|
|
3U 2 |
R′ |
|
|
|
||||
|
|
|
1ф |
2 |
|
|
. |
||
|
|
|
R′ 2 |
|
|||||
ω0 S R1 |
+ |
|
|
2 |
|
+ X k2 |
|
||
|
|
|
|||||||
|
|
|
|
S |
|
|
|||
|
|
|
|
|
|
|
|
|
|
85
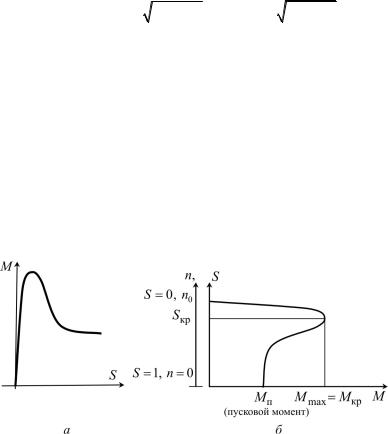
По полученной зависимости можно построить график
M = f (S ) |
(рис. 3.22, а) и график механической характеристики |
||||||||||||||||||||||
(рис. 3.22, б). Из условия |
dM |
= 0 |
получаем координату экстре- |
||||||||||||||||||||
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dS |
|
|
|
|
|
|
|
|
||
мальной (критической) точки |
|
|
|
|
|
|
|
|
|||||||||||||||
|
M кр = |
|
|
|
|
|
|
3U12ф |
|
|
|
; Sкр = ± |
|
R2′ |
|||||||||
|
|
|
|
|
|
|
|
. |
|||||||||||||||
|
2ω0 (R1 ± R12 + X k2 ) |
|
R12 + X k2 |
||||||||||||||||||||
Так как R1 |
|
мало, то им можно пренебречь. |
|||||||||||||||||||||
|
|
|
|
|
|
|
3U 2 |
R′ |
|
|
|
|
|
|
|
|
|
|
|
||||
M = |
|
|
|
|
|
|
|
|
1ф 2 |
|
, |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
R′ |
2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
ω0 S |
|
2 |
|
+ X k2 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
S |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R′ |
|
|
|
|
|
|
|
M = |
2M |
кр |
|
|
||||||
Sкр = ± |
2 |
, |
|
|
|
|
|
|
|
|
– формулаКлосса. |
||||||||||||
|
|
|
|
|
|
|
Sкр |
|
|
S |
|||||||||||||
|
|
|
|
|
X k |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
||||
|
|
|
|
|
3U |
2 |
|
|
|
|
|
|
|
|
S |
|
Sкр |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
M |
|
= |
|
1ф |
, |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
кр |
|
|
2ω0 X k |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.22. Механическая характеристика АД
86
Анализ механической характеристики. Анализ выражения для определения момента показывает, что момент пропорционален квадрату приложенного напряжения, поэтому асинхронный двигатель очень критичен к изменению напряжения питания. Критический момент Мкр не зависит от сопротивления обмотки ротора R2 ,
а критическое скольжение Sкр – от величины приложенного напряжения U1ф. Асинхронный двигатель имеет малый пусковой момент Мп, что создает проблемыпризапускедвигателя поднагрузкой.
Изменения напряжения питания U и активного сопротивленияR2 влияют намеханические характеристики АД(рис. 3.23).
S |
|
|
S |
|
|
|
0 |
U1 |
|
0 |
R21 |
|
|
S |
кр |
U1′ |
|
Sкр |
|
|
|
|
|
R22 |
|
||
|
|
U1 > U1′ |
|
|
||
|
1 |
|
|
1 |
R21 < R22 |
|
|
|
M |
|
M |
||
|
|
M кр |
|
M кр |
||
|
|
а |
|
|
б |
|
|
|
Рис. 3.23. Влияние U (а) и R2 (б) на механическую |
||||
|
|
|
характеристику АД |
|
|
|
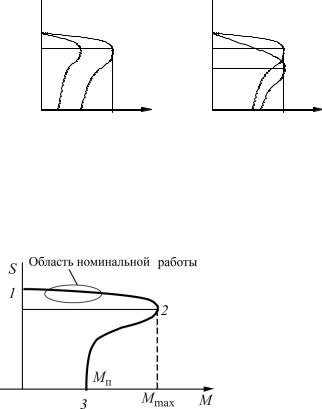
Области работы АД. На механической характеристике можновыделитьдве области работы: область устойчивой работы двигателя 1–2 и неус-
|
тойчивой |
работы |
2–3 |
|
(рис. 3.24). В области |
||
|
устойчивой работы про- |
||
|
является свойство само- |
||
|
регуляции скорости. |
||
|
При |
попадании |
|
|
в область неустойчивой |
||
|
работы двигатель |
оста- |
|
Рис. 3.24. Области работы АД |
навливается. |
|
|
87

Для оценки перегрузочной способности двигателя вводится коэффициент перегрузки
λ = M кр .
M ном
3.2.9. Способы пуска АД
Проблемы пуска: большой пусковой ток, малый пусковой момент.
Ток ротора I2 определяется из соотношения
|
|
= |
|
E2k S |
|
|||||
I |
2 |
|
|
|
|
|
|
. |
|
|
|
R22 |
+ |
|
|
|
|
||||
|
|
|
|
( X 2 S )2 |
|
|||||
При пуске S = 1 , |
I |
2п = |
|
E2k |
|
= (5...7) I |
2н , где I2п и I2н – |
|||
R22 |
+ |
|
||||||||
|
|
|
|
X 22 |
|
|||||
соответственно пусковой и номинальный токи ротора.
|
|
|
3U 2 |
|
R′ |
|
|
|
|||
M = |
|
|
|
1ф |
|
2 |
|
; |
|||
|
|
R′ |
2 |
|
|
||||||
|
ω0 S |
2 |
|
+ |
X k2 |
||||||
|
S |
||||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
3U |
2 R′ |
|
|
|
|||
M п = |
|
|
|
|
1ф |
2 |
|
|
; |
||
ω0 |
( R2′ )2 |
+ |
X k2 |
||||||||
|
|
|
|
|
|
|
|
|
|
||
M п < M max .
Применяются следующие способы пуска: прямой пуск, пуск при пониженном напряжении, пуск при введении в цепь ротора добавочных активных сопротивлений.
Прямой пуск. Применяется при пуске двигателей в мощных сетях. Никаких мер по повышению пускового момента и понижению пускового тока не предусмотрено.
Пуск при пониженном напряжении. С целью понижения пускового тока на время пуска понижают напряжение питания в слабых сетях.
88
Рассмотрим два варианта пуска двигателя при пониженном напряжении. Вариант I – пуск при введении в цепь статора добавочных сопротивлений (рис. 3.25). На время пуска К разомкнуты, после пуска – замкнуты. При разомкнутых К ↑ R→↓ Iп .
Рис. 3.25. Схема пуска двигателя (а)
и механические характеристики АД (б). Вариант I (1 – К разомкнуты; 2 – Rд = 0, К замкнуты)
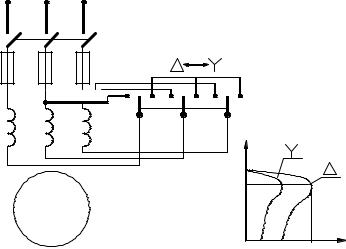
Вариант II – пуск двигателя при переключении обмоток статора на время пуска с соединения треугольником на соединение звездой (рис. 3.26).
В момент пуска переключатель находится в правом положении и обмотки статора соединяются в звезду. После пуска переключатель устанавливают в левое положение и обмотки статора соединяются в треугольник. Анализ трехфазной цепи показывает, что при соединении обмоток статора в звезду потребляемый из сети ток будет в 3 раза меньше, чем при соединении в треугольник.
89
≈ U
C1 

C2 C3
C4 C5 C6
n
M
а |
б |
Рис. 3.26. Схема пуска двигателя (а)
и механические характеристики АД (б). Вариант II
Недостатком обоих методов является уменьшение пускового момента за счет понижения напряжения на статоре.
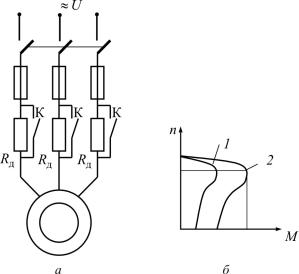
Пуск при введении в цепь ротора добавочных активных со-
противлений. На время пуска в цепь ротора вводятся добавочные сопротивления, которые помереразгонавыводятся (рис. 3.27).
Процесс пуска происходит при изменении вращающего момента в пределах [M1…M2]. Переключение контактов «К» происходит в точке М = М1.
Метод позволяет решить обе проблемы пуска, т.е. уменьшить пусковой ток за счет повышения сопротивления цепи и повысить пусковой момент. Такой способ пуска возможен только для двигателя с фазным ротором.
90