

5 курс / Хирургия детская / Повреждения_грудной_клетки_тупыми_предметами_биомеханика,_диагностика
.pdf42 |
Глава 3. Теоретические аспекты биомеханического |
|
|
|
моделирования грудной клетки |
РСЬРО
Рис. 3.6. Разложение вектора внешней нагрузки на составляющие. Кроме того, составляющую внешней нагрузки и плоскости
реберной дуги Р также необходимо разложить на силы Рх и Ру (рис. 3.7).
Рис. 3.7. Разложение внешней нагрузки в плоскости реберной дуги.
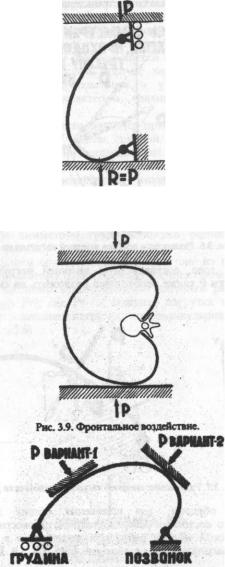
Таким образом, для выявления обших закономерностей напряженного состояния ребер достаточно провести силовой расчет биомеханической модели ребра для воздействия в передне-заднем, боковом и диагональном направлениях (рис. 3.8,3.9, ЗЛО).
Глава 3. Теоретические аспекты биомеханичесхого моделирования грудной клетки
Рис. 3.8. Сагиттальное воздействие.
Рис. ЗЛО. Различные варианты диагонального внешнего воздействия.

44 |
Глава 3. Теоретические аспекты биомеханического |
|
|
|
моделирования грудной клетки |
3.5. |
С и л о в о й р а с ч е т ребра |
|
Силовой расчет ребра заключается в определении опорных реакции для выбранной расчетной схемы и варианта нагружения, и построения вдоль оси жесткости ребра эпюр силовых факторов: нормальных и секущих сил, изгибающих и крутящих моментов. В науке о сопротивлении материалов осью жесткости называется линия, соединяющая центры жесткости поперечных сечений балок. Под центром жесткости или центром изгиба сечения понимается точка, при условном приложении в которую секущей силы не происходит закручивания сечения (1), В дальнейшем; с целью упрощения математических и графических построений под осью жесткости принимается линия, схематично изображающая реберную дугу.
J . 5 . J . Общие принципы силового расчета ребра
При выборе расчетной схемы было показано, что ребро представляет собой криволинейную плоскую раму, опирающуюся на грудину и позвоночник. Основным вариантом нагружения ребра является сосредоточенная ударная нагрузка, которую схематично можно изобразить вектором силы общего направления. В общем случае расчетная схема ребра является несколько раз статически неопределимой, но, учитывая особенности строения грудной клетки в детском возрасте, расчетную схему можно привести, как было показано выше, к статически определимой.
Расчетная статически определимая схема ребра изображена на рис, ЗЛК
Данная схема имеет 6 неизвестных реакций опор: R*»R J'RI'RI-M I"M J и нагружена силой Р, имеющей вектор
общего направления, с проекциями Рх, Ру и Pz вдоль осей координат: оощегоВеличинынаправления,неизвестныхпроекциямреакцийгх, гу ви rzстатическивдоль осей-определимыхкоординат: схемахВеличинвы сляютсяы неизвестныхпутем решенияреакцийсистемыв статическиуравнений-определимыхравновесия. Длясхемахданнойвычисляютсясистемыпутеможнорешениясоставитьсистемы6 уравненийй равновесия:. Дляравенствданнонулюй систвсехмысилможнп осямсоставитьX,Y,Z и равенство6 ура ненийнулю равновесиямоментоот: равенстввсех сил вокругнулютехвсехжесилосейпо. осям X,Y,Z и равенство нулю моментов от
всех сил вокруг тех же осей.
ХХ* 0;

Глава 3. Теоретические аспекты биомеханического |
45 |
|
|
моделирования грудной клетки |
|
Рис. 3.11. Расчетная схема ребра (пояснения в тексте)
Пояснения к расчетной схеме (рис. 3.11)
-опора Г - грудина;
-опора П - позвоночник;
-плоскость XOY системы координат совпадает с плоскостью реберной дуги;
-Р,Рх,Ру ,Р2 - внешняя нагрузка и ее проекции на оси координат;
-р - точка приложения внешней нагрузки Р с координатами X и
Y;
-i- текущая точка на реберной дуге с координатами X иY;
-L - расстояние между опорами Г н П (принимаем, что опоры Г
иП расположены на оси X);
-а ,, аР - углы между касательной к реберной дуге в точках a * и аР и осью X;
-R *'R*'R!'R*'M*h M у -неизвестные реакции опор. Представим подробно левую часть системы 1. В уравнениях
моментов принимаем, что расчет проводится относительно опоры IL Для расчетной схемы и варианта нагружения, изображенных на
рис. 3.11 система уравнений равновесия имеет вид:
KSL+P.*Y,+P,iLXH*

46 |
Глава Э. Теоретические аспекты биомеханического |
|
моделировании грудной клетки |
При формировании систем уравнений в общем виде, подобных системе 2, как правило, принимается, что вектора всех сил и реакций совпадают с положительным направлением соответствующих осей координат/ При численном решении необходимо в уравнениях и формулах величины внешних нагрузок подставлять с соответствующими знаками. Например, при численном решении расчетной схемы, изображенной на рис. 3.11 в ург гениях системы 2 внешние силы Рх и Pz представляются со знаком " + а сила Ру - со знаком" - V
Результатом решения системы уравнений 2 является определение неизвестных сил и моментов. Ввиду тривиальности и стандартности решения системы 2 приводим окончательные результаты:
3
4
5
6
7
8
После вычисления опорных реакций по формулам 3-8 появляется возможность построения эпюр силовых факторов вдоль реберной дуги.
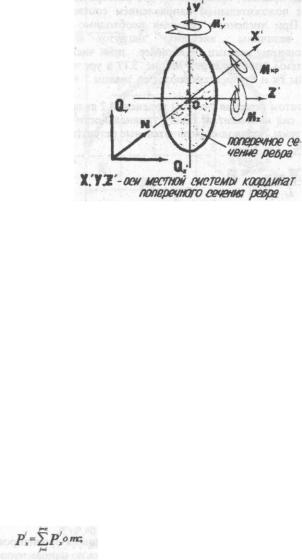
В каждом поперечном сечении ребра при внешней нагрузке общего направления действуют 6 силовых факторов: нормальная сила N, секущие силы Qy' и Qz\ крутящий момент М«р., изгибающие моменты Му' и Mz' (рис. 3.12).
Каждое поперечное сечение имеет свою ориентацию в пространстве из-за криволинейной формы ребра. Свяжем местную систему координат X Y T любого сечения с общей, системой координат X YZ расчетной модели следующими правилами:
-местная система координат сечения и общая система координат модели являются правой ортогональной системой координат;
-плоскость X'OV местной системы совпадает с плоскостью XOY общей системы координат;
-ось Y' направлена кнаружи от ребра;
-ось X' перпендикулярна поперечному сечению и ориентирована вдоль касательной к реберной дуге в данной точке по направлению от
грудины к ПОЗВОНОЧНИКУ .
Глава 3. Теоретические аспекты биомеханического |
47 |
||
|
моделирования грудной клетки |
|
|
|
|
|
|
Х/УЗГ- оси иеспюй системы коорлннат поперечного сечет ребра
Рис. 3.12. Силовые факторы в поперечном сечении ребра.
При вычислении силовых факторов в сечениях и построении эпюр принимаем следующие правила:
-построение эпюр силовых факторов выполняется в направлении от грудины к позвоночнику;
-нормальная сила N имеет положительное значение, если она растягивает участок dS реберной дуги, расположенный между сечениями "i + i +1";
-силовые факторы Qy', Qz\MKp.,My\Mz' имеют положительное значение, если их векторы совпадают с положительным направлением соответствующих осей местной системы координат сечений.
Данные правила обеспечивают возможность сравнения силовых факторов в любом поперечном сечении реберной дуги для разнообразных вариантов внешних воздействий.
Вычисление силовых факторов в любом сечении реберной дуги рационально выполнять в следующем порядке:
-от нагрузок на отсеченную часть в общей системе координат модели определяются силы и моменты в рассматриваемом сечении;
-вычисленные силы и моменты переводятся из общей системы в местную систему координат сечения.
Go стороны отсеченной части на i - ое сечение реберной дуги действуют силы и моменты, определяемые в общей системе модели по
следующим формулам: |
|
РЛР1^ |
9 |

48 |
Глава 3. Теоретические аспекты биомеханического |
||
|
моделирования грудной клетки |
|
|
Формулы 9-14 составлены в общем виде для любых вариантов нагружения.
Силовые факторы в сечении определяются пересчетом сил и моментов 9-14 из общей в местную систему координат сечения по формулам:
В формулах 15-20 учтены принятые правила знаков для силовых
факторов.
На рис.3.13 показана графическая иллюстрация пересчета сил и моментов из одной системы координат в другую.
Рассмотрим более подробно процесс силового расчета и
построение эпюр силовых факторов для основных случаев нагружения ребра.
1. Наиболее типичным является случай нагружения ребра, изображенный на рис. 3.11 Опорные реакции в этом варианте
нагружения рассчитываются по формулам 3-8.
Для вычисления силовых факторов в сечениях реберную дугу удобно разбить на 2 участка:
-Г-Р - от грудины до точки приложения внешней нагрузки;
-Р-П - от точки приложения внешней нагрузки до позвоночника.

Глава 3. Теоретические аспекты биомеханического |
49 |
|||
|
моделирования трудной клетки |
|
|
|
Рис. 3.13. Схема пересчета силовых факторов из одной системы
координат в другую (пояснение в тексте).
В этом случае на участке Г-Р в качестве нагрузок на отсеченную часть фигурируют реакции опор Ry. Силовые факторы в сечениях на участке Г-Р определяются по формулам:
FT'—R',*B*H |
21 |
22
50 |
Глава 3. Теоретические аспекты биомеханического |
|
моделирования грудной клетки |
Конкретные примеры построения эпюр силовых факторов вдоль ребра в различных вариантах нагружения, а также расчет напряженного состояния ребра приведены в приложении №1
3.6.Определение скорости движения внешнего объекта, при которой может произойти разрушение ребра
Практический интерес представляет возможность теоретического определения скорости движения внешнего объекта (например, автомобиля), при которой происходит разрушение ребра.
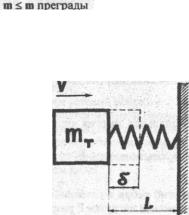
Для лучшего физического понимания процесса решения данной задачи представим, что тело массой m движется со скоростью V и наталкивается на неподвижную преграду, масса которой во много раз превышает массу движущегося тела.
Причем взаимодействие тел происходит через некую упругую связь ( в данном случае ребро), имеющую линейную зависимость между перемещением и силой сопротивления. Схематично этот процесс можно иллюстрировать следующей схемой (рис. 3.14).
Рис. 3.14. Схема взаимодействия движущегося тела
с неподвижной преградой.
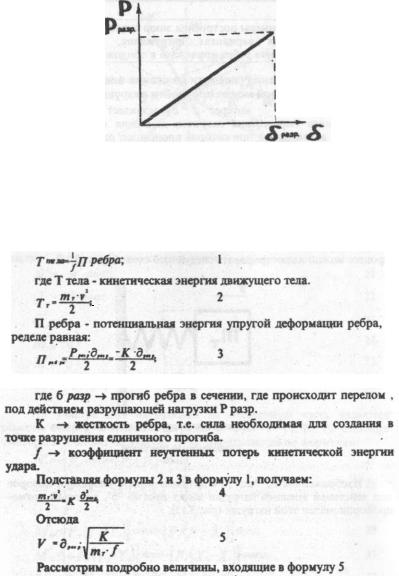
Изображенная на рис 3.14 пружина имитирует ребро, которое под действием внешнее нагрузки имеет прогиб "б", который прямопропорционален этой нагрузке (рис.3.15).
Глава 3. Теоретические аспекты биомеханического |
51 |
|
|
моделирования грудной клетки |
|
Рис. 3.15. Зависимость прогиба ребра в точке приложения внешней
нагрузки от величины этой нагрузки.
Скорость тела, при которой произойдет разрушение ребра, можно вычислить из условия равенства кинетической энергии движущегося тела и потенциальной энергии упругой деформации ребра, которую это ребро может накопить.
где Т тела - кинетическая энергия движущего тела.
X г |
• |
2 |
П ребра - потенциальная энергия упругой деформации ребра, в пределе равная: