

teoreticheskaja_mekhanika-konspekt_lekcij
.pdfной в той же плоскости действия и имеющей одинаковый с пер% вой парой алгебраический момент.
По%другому, две пары сил, которые расположены в одной плоскости, эквивалентны, если они имеют одинаковые алгебраи% ческие моменты.
Пару сил как жесткую фигуру можно поворачивать и перено% сить в плоскости ее действия как угодно. У пары сил можно изме% нять плечо и силы, сохраняя при этом алгебраический момент пары и плоскость действия. Эти операции над парами сил не из% меняют их действия на твердое тело.
Теорема о сумме алгебраических моментов пары сил. Пары сил, действующие на твердое тело и расположенные в одной плоскости, можно привести к одной паре сил, алгебраический момент кото% рой равен сумме алгебраических моментов составляющих пар сил:
M= ∑Mi .
i =1n
Пары сил, расположенные в параллельных плоскостях, также складываются, поскольку их предварительно можно перенести в одну плоскость. Если сложение выполнять графически, когда векторные моменты пары сил находятся в одной плоскости, то векторный момент эквивалентной пары сил будет иметь вид за% мыкающей векторного многоугольника, построенного из вектор% ных моментов заданных пар сил.
ЛЕКЦИЯ № 5. Система сил,
произвольно расположенных на плоскости
Приведение силы к заданному центру. Силу можно переносить па% раллельно самой себе в любую точку твердого тела, добавляя при этом пару сил, векторный момент которой равен векторному момен% ту переносимой силы относительно новой точки приложения силы.
Приведение силы к силе и паре.
Теорема Пуансо: любую произвольную систему сил, действую% щих на твердое тело, можно в общем случае привести к силе и па% ре сил. Эта замена системы сил одной силой и парой сил назы% вается приведением системы сил к заданному центру.
Главный вектор системы сил — это вектор, который равен век% торной сумме этих сил. Главный вектор системы сил изображает% ся вектором, замыкающим силовой многоугольник, построен% ный на силах:
R= ∑Fi .
i =1n
Главный момент системы сил относительно точки тела — это сумма векторных моментов всех сил системы относительно этой точки. Он является вектором, который замыкает векторный мно% гоугольник, образованный при сложении векторных моментов сил системы относительно выбранного центра. Главный момент
L0 равняется сумме векторных моментов присоединения пар:
n
L0 = ∑M 0 (Fi ).
i =1
Система сил, линии действия которых лежат в одной плоскости, называется плоской системой сил, приложенных к твердому телу.
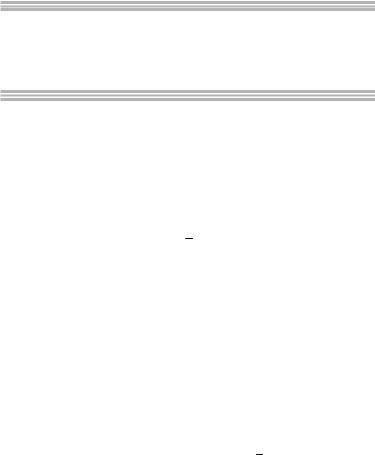
Уравнения равновесия системы сил, произвольно расположенных на плоскости. Пусть каждая из сил расположена в одной плоскости с осями координат ОX, ОY, и потому ее моменты относительно этих осей равны нулю (рис. 3а). Значит, условия равновесия:
12

n
∑M x (Fi ) = 0,
i =1
n
∑M y (Fi ) = 0
i =1
будут тождествами. Моменты силы относительно ОZ, которая перпендикулярна силам, равны алгебраическим моментам этих сил относительно точки О. Следовательно,
n |
|
n |
|
|
∑M z (Fi |
) =∑M 0(Fi ). |
|||
i =1 |
|
i =1 |
||
Отсюда получатся три условия равновесия:
n |
|
|
n |
|
|
∑Fix = 0, |
∑Fiy = 0, |
||||
i =1 |
i =1 |
||||
n
∑M 0 (Fi ) = 0.
i =1
Значит, для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, рас% положенных в плоскости действия этих сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
F2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
O1 |
|
|
|
O |
O2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F3 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
a) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
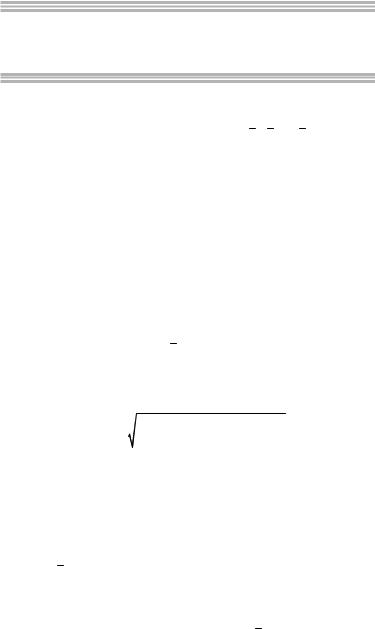
Рис. 3. Силы, произвольно расположенные на плоскости (б), па# раллельные силы на плоскости (а)
Сложение параллельных сил на плоскости. Пусть заданы две па% раллельные силы (F1, F2 ), они направлены в одну (или разные) стороны. Если F1 ≠ − F2 , т. е. они не образуют пару сил, то они
13
приводятся к равнодействующей с некоторым центром приведе% ния О. Положение точки О можно найти, подсчитав относитель% но нее момент равнодействующей, он равен нулю в каждом из приведенных случаев (рис. 3б)
R= ∑Fi .
i =1n
Из формул
M 0 (R ) = F1 ×О1О − F2 ×ОО2,
F1 = ОО2
F2 О1О
следует, что система двух параллельных сил, не образующих пару, имеет равнодействующую, параллельную этим силам. При этом ее модуль равен сумме модулей этих сил, когда силы направлены в одну сторону, и разности модулей составляющих сил, когда они направлены в разные стороны. Линия действия равнодействующей
делит расстояние между точками О1, О2 приложения сил F1, F2 на ча% сти, которые обратно пропорциональны модулям этих сил внутрен% ним образом, если силы направлены в одну сторону, и внешним об% разом, если они направлены в разные стороны.
ЛЕКЦИЯ № 6. Условия равновесия сил,
приложенных к рычагу. Сцепление и трение скольжения
Рычагом называется форма действия плоской системы сил на объект, при которой соблюдаются те же условия равновесия сил, что и для точки, на которую действует сила. Чтобы определить устой% чивость равновесия сил, приложенных к рычагу, нужно составить уравнение моментов относительно точки.
Алгебраический момент относительно точки — это произведе% ние модуля силы на плечо силы относительно этой точки
M 0 (F ) = ±Fh.
Плечо пары h относительно точки — это кратчайшее расстоя% ние между этой точкой и линией действия силы, т. е. длина отрез% ка перпендикуляра, опущенного из точки на линию действия си% лы. Алгебраический момент относительно точки численно равен удвоенной площади треугольника, построенного на силе.
Векторное условие равновесия: для равновесия системы сил, приложенных к точке, необходимо и достаточно, чтобы главный вектор системы сил был равен нулю и главный момент системы сил относительно точки также был равен нулю.
Три условия равновесия:
n |
|
|
n |
|
|
∑Fix = 0, |
∑Fiy = 0, |
||||
i =1 |
i =1 |
||||
n
∑M 0 (Fi ) = 0.
i =1
В случае опрокидывания на устойчивое положение тела или системы тел действует возбуждающая сила, которая стремится опрокинуть (вывести из равновесия) объект. Положение равнове% сия q0 называется устойчивым, если в каждой паре сколь угодно малых положительных фиксированных чисел е для моментов вре% мени t > t0 выполняется неравенство:
/q(t) – q(t0)/ < е.
Потенциальная энергия тела будет иметь минимум или рав% няться нулю, т. е.
15
П = 1/2∑Ciqi = 0,
где Ci — коэффициент устойчивости.
Приближенные законы, препятствующие качению.
1.Наибольший момент пары сил, препятствующий качению, не зависит от радиуса катка.
2.Предельное значение момента пропорционально нор%
мальному давлению, а значит, и равной ему нормальной реак% ции, т. е. Mmax = δ N. Коэффициент трения качения δ при покое
называется коэффициентом трения второго рода.
3. Этот коэффициент устойчивости (сцепления) зависит от ма% териала катка, плоскости и физического состояния поверхности.
При движении или стремлении двигать одно тело по поверхно% сти другого в касательной плоскости поверхности соприкоснове% ния возникает сила трения. На тело действует система сил, и тело находится в равновесии, соприкасаясь с поверхностью другого тела. Если поверхности абсолютно гладкие, то реакция поверхности свя% зи направлена по нормали к общей касательной в точке соприкос% новения. Если силу реакции R шероховатой поверхности разложить на составляющие, одна из которых N направлена по общей норма% ли к поверхности соприкосновения, а другая F находится в каса% тельной плоскости к этим поверхностям, то будет иметь место реак% ция силы трения скольжения. Как правило, рассматривают сухое трение между поверхностями, когда между ними нет смазывающе% го вещества. При покое сила трения зависит только от активных сил. При выбранном направлении касательной в точке соприкос% новения поверхностей тел сила трения находится по формуле:
F= ∑Fi ,
ауже отсюда выражают реакцию:
−N = ∑Fi .
ЛЕКЦИЯ № 7. Графическая статика.
Диаграмма Максвелла5Кремона
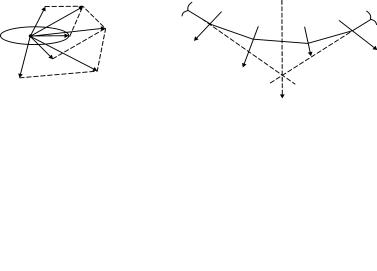
Пусть дана произвольная система сходящихся сил F1, F2, ..., Fn, приложенных к твердому телу. Эти силы как скользящие векторы перенесем в точку пересечения линий их действия, тогда, пользу% ясь аксиомой о параллелограмме сил, можно найти равнодей% ствующую этих сил, которая может быть определена графически и аналитически. Графически сложение двух сходящихся сил осу% ществляется по правилу параллелограмма, при этом
R12 = F1 + F2.
После этого по правилу параллелограмма складывают силы
R12 и F3 и получают их равнодействующую
R123 = R12 + F3 = F1 + F2 + F3.
Врезультате можно получить
R= ∑Fi
i =1n
(рис. 4 а).
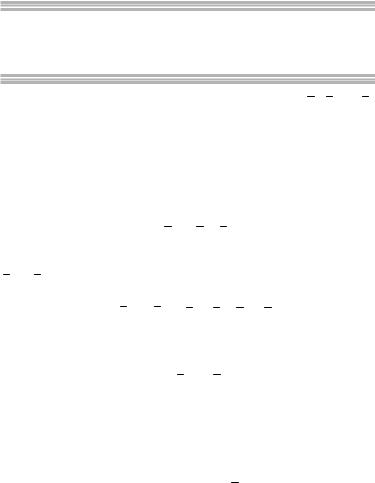
Процесс последовательного применения правила параллело% грамма приводит к построению многоугольника из заданных сил. В таком силовом многоугольнике конец одной из сил служит на%
чалом другой. Равнодействующая сила R в силовом многоуголь% нике соединяет начало первой силы с концом последней, иначе говоря, изображается замыкающей силового многоугольника. Для пространственной системы сходящихся сил силовой много% угольник является пространственной фигурой, для плоской — плоской. Для равновесия системы сходящихся сил, приложенных к твердому телу, замыкающая силового многоугольника (равно% действующая сила) должна обратиться в точку. Другими словами, конец последней силы в многоугольнике должен совпадать с на% чалом первой силы. Этот силовой многоугольник называется
17
замкнутым. Условие (геометрическое) равновесия системы схо% дящихся сил: для равновесия системы сходящихся сил необхо% димо и достаточно, чтобы равнодействующая сила равнялась ну% лю R = 0.Для случая трех сходящихся сил при равновесии должен быть замкнутым силовой треугольник, построенный из трех сил.
В основе построения веревочного многоугольника лежит пред% ставление о многоугольнике, образованном осью, закрепленной по концам невесомой нити (веревки), натянутой действующими на нее силами (рис. 4б). Его построение совместно с силовым много% угольником применяется и для определения геометрических ха% рактеристик плоских сечений, решения некоторых задач инженер% ной гидравлики, экономики и др.
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R123 |
12 |
23 |
34 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Fn |
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
a) |
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
||||
Рис. 4. Построение многоугольника из заданных сил (а), построение веревочного многоугольника (б)
Уравнения равновесия системы сил, произвольно расположен5 ных на плоскости.
Пусть каждая из сил расположена в одной плоскости с осями координат ОX, ОY, и потому ее моменты относительно этих осей равны нулю. Следовательно, условия равновесия
n |
|
|
n |
|
|
∑M x (Fi |
) = 0, |
∑M y (Fi |
) = 0 |
||
i =1 |
i =1 |
||||
становятся тождествами. Моменты силы относительно ОZ, пер% пендикулярной силам, равны алгебраическим моментам этих сил относительно точки О.
Диаграмма Максвелла5Кремона. Построение диаграммы Максвелла%Кремона заключается в соединении силовых мно% гоугольников, построенных для всех узлов фермы, в один чер%
18
теж таким образом, чтобы ни одно из усилий не повторялось дважды. Существуют определенные правила и последователь% ность действий:
1)определяют из условий равновесия всей фермы как твердо% го тела опорные реакции. Осуществляется это аналитически, при помощи уравнений равновесия;
2)отбрасывают опоры и изображают все приложенные к фер% ме силы;
3)части плоскости, ограниченные контуром фермы и линиями действия внешних сил, обозначают буквами; обозначают бу% квами также части плоскости, ограниченные стержнями фер% мы; узлы фермы обозначают римскими цифрами; стержни ну% меруют арабскими цифрами;
4)строят замкнутый многоугольник внешних сил, отклады% вая силы в том порядке, в котором они встречаются при об% ходе фермы;
5)последовательно строят на этом же рисунке замкнутые сило% вые многоугольники для каждого узла; при этом узлы выбирают% ся в таком порядке, чтобы каждый раз число неизвестных усилий в стержнях равнялось двум; обход каждого узла производится в том же направлении, которое было избрано для внешних сил;
6)для определения того, сжат или растянут стержень, в каждом замкнутом многоугольнике мысленно представляют стрелки в одном направлении, указанном известными силами, и пере% носят найденное усилие на стержень; стержень сжат, если уси% лие направлено к узлу, и растянут, если усилие идет от узла;
7)измеряют на диаграмме отрезки, изображающие искомые усилия в стержнях фермы, и находят усилия.
ЛЕКЦИЯ № 8. Система сходящихся сил
в пространстве. Уравнение равновесия сил
Система сходящихся сил — это такая система сил, линии дей% ствия которых пересекаются в одной точке — центре пучка. Если за%
дана произвольная система сходящихся сил F1, F2, .., Fn, приложен% ных к твердому телу, то обычно переносят эти силы как скользящие векторы в точку пересечения линий их действия. После этого, поль% зуясь аксиомой о параллелограмме сил, находят равнодействующую этих сил. Ее можно найти как графически, так и аналитически. Для аналитического определения равнодействующей силы выби% рают систему прямоугольных осей координат и ссылаются на тео% рему из геометрии о том, что проекция замыкающей любого много% угольника на какую%либо ось равна алгебраической сумме проекций составляющих его сторон на ту же ось. Проецируя векторы вектор% ного равенства на прямоугольные оси координат, в соответствии с теоремой о проекции замыкающей получают
|
|
n |
|
|
n |
|
|
|
|
n |
|
|
Rx = ∑Fix , R |
y = ∑Fiy , R |
z |
= ∑Fiz . |
|||||||||
|
|
i =1 |
i =1 |
i =1 |
||||||||
По проекциям определяют модуль равнодействующей силы и косинусы углов ее с осями координат по формулам
|
|
n |
|
|
n |
|
|
n |
|
|
R |
= (∑F )2 |
+ (∑F )2 |
+ (∑F )2 |
|||||||
|
|
|
ix |
|
iy |
|
iz |
|||
|
|
i =1 |
i =1 |
i =1 |
||||||
и
cos (Rx, x ) = Rx / R, cos (Ry, y ) = Ry / R, cos (Rz, z ) = Rz / R.
Следовательно, система n сходящихся сил эквивалентна од%
ной силе R , которая и является равнодействующей этой системы
сил. Процесс последовательного применения правила паралле% лограмма приводит к построению многоугольника из заданных
сил. В силовом многоугольнике конец одной из сил является на% чалом другой, а равнодействующая сила R соединяет начало
20