

ТПКС_Лаб1(семестр2)
.docxМИНИСТЕРТСВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра КИТАМ
ОТЧЁТ
по лабораторной работе №1
по дисциплине «Технологии программирования компьютерных систем»
Выполнил: Проверил:
ст. гр. АКТСІу-17-1 ассистент каф. КИТАМ
Черкашин В.А. Гурин Д. В.
Харьков 2019
1 ПОСТРОЕНИЕ 3D МОДЕЛЕЙ РОБОТОВ
-
Цель: Построить 3D – модель робота с помощью средств OpenGL.
-
Ход работы
#include <glad/glad.h>
#include <GLFW/glfw3.h>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
#include <shader_m.h>
#include <camera.h>
#include <assimp/Importer.hpp>
#include <assimp/scene.h>
#include <assimp/postprocess.h>
#include <SOIL/SOIL.h>
#include <iostream>
using namespace std;
void framebuffer_size_callback(GLFWwindow* window, int width, int height);
void mouse_callback(GLFWwindow* window, double xpos, double ypos);
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset);
void processInput(GLFWwindow* window);
const unsigned int SCR_WIDTH = 800;
const unsigned int SCR_HEIGHT = 600;
Camera camera(glm::vec3(0.0f, 0.0f, 3.0f));
float lastX = SCR_WIDTH / 2.0f;
float lastY = SCR_HEIGHT / 2.0f;
bool firstMouse = true;
float deltaTime = 0.0f;
float lastFrame = 0.0f;
int main()
{
glfwInit();
glfwWindowHint(GLFW_CONTEXT_VERSION_MAJOR, 3);
glfwWindowHint(GLFW_CONTEXT_VERSION_MINOR, 3);
glfwWindowHint(GLFW_OPENGL_PROFILE, GLFW_OPENGL_CORE_PROFILE);
#ifdef __APPLE__
glfwWindowHint(GLFW_OPENGL_FORWARD_COMPAT, GL_TRUE);
#endif
GLFWwindow* window = glfwCreateWindow(SCR_WIDTH, SCR_HEIGHT, "LearnOpenGL", NULL, NULL);
if (window == NULL)
{
std::cout << "Failed to create GLFW window" << std::endl;
glfwTerminate();
return -1;
}
glfwMakeContextCurrent(window);
glfwSetFramebufferSizeCallback(window, framebuffer_size_callback);
glfwSetCursorPosCallback(window, mouse_callback);
glfwSetScrollCallback(window, scroll_callback);
glfwSetInputMode(window, GLFW_CURSOR, GLFW_CURSOR_DISABLED);
if (!gladLoadGLLoader((GLADloadproc)glfwGetProcAddress))
{
std::cout << "Failed to initialize GLAD" << std::endl;
return -1;
}
glEnable(GL_DEPTH_TEST);
Shader ourShader("7.4.camera.vs", "7.4.camera.fs");
Assimp::Importer importer;
const aiScene* scene = importer.ReadFile("models/robotic_arm.obj", aiProcess_Triangulate | aiProcess_FlipUVs | aiProcess_CalcTangentSpace);
if (!scene || scene->mFlags & AI_SCENE_FLAGS_INCOMPLETE || !scene->mRootNode)
{
cout << "ERROR::ASSIMP:: " << importer.GetErrorString() << endl;
return 0;
}
vector<float> vertices;
for (unsigned int i = 0; i < scene->mNumMeshes; i++)
{
for (unsigned int j = 0; j < scene->mMeshes[i]->mNumVertices; j++) {
vertices.push_back(scene->mMeshes[i]->mVertices[j].x);
vertices.push_back(scene->mMeshes[i]->mVertices[j].y);
vertices.push_back(scene->mMeshes[i]->mVertices[j].z);
vertices.push_back(0.0f);
vertices.push_back(0.0f);
}
}
unsigned int VBO, VAO;
glGenVertexArrays(1, &VAO);
glGenBuffers(1, &VBO);
glBindVertexArray(VAO);
glBindBuffer(GL_ARRAY_BUFFER, VBO);
glBufferData(GL_ARRAY_BUFFER, vertices.size() * sizeof(float), &vertices[0], GL_STATIC_DRAW);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 5 * sizeof(float), (void*)0);
glEnableVertexAttribArray(0);
glVertexAttribPointer(1, 2, GL_FLOAT, GL_FALSE, 5 * sizeof(float), (float*)(2 * sizeof(float)));
glEnableVertexAttribArray(1);
glBindBuffer(GL_ARRAY_BUFFER, 0);
glBindVertexArray(0);
GLuint texture1;
glGenTextures(1, &texture1);
glBindTexture(GL_TEXTURE_2D, texture1);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
int width, height;
unsigned char* image = SOIL_load_image("container.jpg", &width, &height, 0, SOIL_LOAD_RGB);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB, width, height, 0, GL_RGB, GL_UNSIGNED_BYTE, image);
glGenerateMipmap(GL_TEXTURE_2D);
SOIL_free_image_data(image);
glBindTexture(GL_TEXTURE_2D, 0);
while (!glfwWindowShouldClose(window))
{
float currentFrame = glfwGetTime();
deltaTime = currentFrame - lastFrame;
lastFrame = currentFrame;
processInput(window);
glClearColor(0.2f, 0.3f, 0.3f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
ourShader.use();
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, texture1);
glUniform1i(glGetUniformLocation(ourShader.ID, "ourTexture;"), 1);
glm::mat4 projection = glm::perspective(glm::radians(camera.Zoom), (float)SCR_WIDTH / (float)SCR_HEIGHT, 0.1f, 100.0f);
glm::mat4 view = camera.GetViewMatrix();
ourShader.setMat4("projection", projection);
ourShader.setMat4("view", view);
glm::mat4 model = glm::mat4(1.0f);
model = glm::translate(model, glm::vec3(0.0f, 0.0f, 0.0f));
model = glm::scale(model, glm::vec3(0.001f, 0.001f, 0.001f));
ourShader.setMat4("model", model);
glBindVertexArray(VAO);
glDrawArrays(GL_TRIANGLES, 0, vertices.size());
glfwSwapBuffers(window);
glfwPollEvents();
}
glfwTerminate();
return 0;
}
void processInput(GLFWwindow * window)
{
if (glfwGetKey(window, GLFW_KEY_ESCAPE) == GLFW_PRESS)
glfwSetWindowShouldClose(window, true);
if (glfwGetKey(window, GLFW_KEY_W) == GLFW_PRESS)
camera.ProcessKeyboard(FORWARD, deltaTime);
if (glfwGetKey(window, GLFW_KEY_S) == GLFW_PRESS)
camera.ProcessKeyboard(BACKWARD, deltaTime);
if (glfwGetKey(window, GLFW_KEY_A) == GLFW_PRESS)
camera.ProcessKeyboard(LEFT, deltaTime);
if (glfwGetKey(window, GLFW_KEY_D) == GLFW_PRESS)
camera.ProcessKeyboard(RIGHT, deltaTime);
}
void framebuffer_size_callback(GLFWwindow * window, int width, int height)
{
glViewport(0, 0, width, height);
}
void mouse_callback(GLFWwindow * window, double xpos, double ypos)
{
if (firstMouse)
{
lastX = xpos;
lastY = ypos;
firstMouse = false;
}
float xoffset = xpos - lastX;
float yoffset = lastY - ypos;
lastX = xpos;
lastY = ypos;
camera.ProcessMouseMovement(xoffset, yoffset);
}
void scroll_callback(GLFWwindow * window, double xoffset, double yoffset)
{
camera.ProcessMouseScroll(yoffset);
}
#version 330 core
in vec2 TexCoord;
out vec4 color;
uniform sampler2D ourTexture;
void main()
{
color = texture(ourTexture, TexCoord);
}
Фрагментный шейдер
#version 330 core
layout (location = 0) in vec3 aPos;
layout (location = 1) in vec2 texCoord;
uniform mat4 model;
uniform mat4 view;
uniform mat4 projection;
out vec2 TexCoord;
void main()
{
TexCoord = texCoord;
gl_Position = projection * view * model * vec4(aPos, 1.0f);
}
Вершинный шейдер
ВЫВОДЫ
В ходе выполнения лабораторной работы была построена 3D модель промышленного робота средствами OpenGL 3.3. Для этого были рассмотрены следующие библиотеки
-
Glad
-
GLFW
-
Glm
-
SOIL
Были написаны вершинный и фрагментный шейдер для вывода робота на экран.
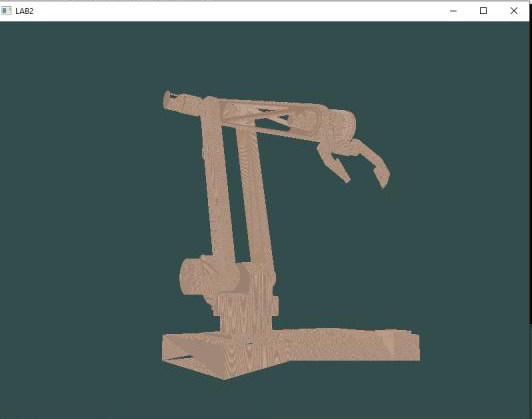
Рис 1.1 – Результат работы программы.