

shpory
.docx|
1.Предмет механики. Механика классическая, релятивистская, квантовая: области применимость. Разделы механики. Механика – это часть физики, изучающая механическое движение материальных тел и происходящие при этом взаимодействия м/у ними. Классическая механика является предельным случаем релятивистской механики. Движения тел, скорости которых сравнимы со скоростью света в вакууме, называют релятивистскими. Например, движения планет, спутников, космических кораблей относятся к медленным движениям и полностью описываются классической механикой. На основании теории относительности была создана релятивистская механика, применимая не только к медленным, но и сколь угодно быстрым движениям, сравнимым со скоростью света в вакууме. Успешная работа ускорителей по разгону элементарных частиц подтвердила справедливость выводов релятивистской механики. Например, если гравитационное поле является сверхсильным, то классическая теория тяготения Ньютона к нему не применима. В этом случае используется теория тяготения Эйнштейна. Так, при сжатии тела в точку сила тяготения по теории Ньютона стремится к бесконечности. Механика включает в себя следующие разделы: кинематика (изучает геометрическое свойство движения тел без причин, вызвавших это движение), динамика (изучает движение тел с учетом причин вызвавших это движение), статика (изучает равновесие тел под действием сил). |
2.Способы кинематического описания движения материальной точки. Скорость и ускорение. Естественный способ. Этим способом пользуются, если известна траектория движения точки. Траекторией назыв. совокупность точек пространства, через которые проходит движущаяся материальная частица. Это линия, которую она вычерчивает в пространстве. Координатный способ. Если точка движется, то ее координаты изменяются с течением времени. Т. к. координаты точки зависят от времени, то можно сказать, что они являются ф-ми времени. В зависимости от формы траектории все движения точки делятся на прямолинейные и криволинейные. Если траекторией является прямая линия, движ. т. назыв. прямолинейным, а если кривая - криволинейным. Векторный способ. Положение точки можно задать, как известно, и с помощью радиус-вектора. При движении материальной точки радиус-вектор, определяющий ее положение, с течением времени изменяется, т. е. является функцией времени: r=r(t) (стрелочки над ними нужны). Одна такая ф-ия равняется трем ф-ям. Если ввести единичные векторы i, j, k (i = j = k = 1), направленные соответственно вдоль осей x, y и z то, очевидно, з. движения может быть представлен в виде: r(t) = x(t)i + y(t)j + z(t)k. Средняя скорость – векторная физическая величина, равная отношению вектора перемещения к промежутку времени, за которое оно произошло
Мгновенная скорость – векторная физическая величина, равная |
производной от радиус вектора по времени. Мгновенная скорость всегда направлена по касательной к траектории.
В системе СИ скорость измеряется в метрах в секунду Если тело движется не равномерно и прямолинейно, то у него есть не только скорость, но и ускорение. Ускорение (или мгновенное ускорение) – векторная физическая величина, вторая производная от радиус-вектора по времени, и, соответственно, первая производная от мгновенной скорости
Ускорение показывает, как быстро изменяется скорость тела. В случае прямолинейного движения, направления векторов скорости и ускорения совпадают. В случае же криволинейного движения, вектор ускорения можно разложить на две составляющие: ускорение тангенциальное, и ускорение нормальное. Тангенциальное ускорение показывает, как быстро изменяется скорость тела по модулю и направлено по касательной к траектории
Нормальное же ускорение характеризует быстроту изменения скорости по направлению. Векторынормального и тангенциального ускорения взаимно перпендикулярны, а вектор нормального ускорения направлен к центру окружности, по которой движется точка.
|
||||||||||
|
3.Классификация видов движения материальной точки. Равномерное прямолинейное движение вдоль оси Ox. Начальную координату точки в момент времени t=0 обозначим через x0. При этом виде движения скорость vx (при наличии только одной компоненты скорости v=vx) не меняется ни по величине, ни по направлению, следовательно
Равнопеременное прямолинейное движение вдоль оси Ox. Начальную координату точки в момент времени t=0 обозначим через x0, а начальную скорость через v0. Направление движения не меняется, значит an=0. Величина скорости меняется на одинаковую величину за равные промежутки времени, то есть тангенциальное ускорение постоянно aτ=const. Если направления вектора ускорения и вектора скорости совпадают, то скорость со временем возрастает и движение будет равноускоренным, если вектора направлены в противоположные стороны, то скорость со временем уменьшается и движение будет равнозамедленным. Найдем величину скорости v
Равномерное движение по окружности радиусом R является примером простейшего криволинейного движения. Вектор скорости меняет свое направление an≠0, но не меняет своей величины (aτ=0). Ускорение материальной точки совпадает с вектором нормального ускорения имеющего величину.
|
скорости меняет свое направление an≠0, но не меняет своей величины (aτ=0). Ускорение материальной точки совпадает с вектором нормального ускорения имеющего величину.
Круговая или циклическая частота ω равняется углу, измеряемому в радианах, описываемому радиусом-вектором точки на окружности в единицу времени (размерность радиан в секунду, рад/с). Поскольку за полный оборот радиус-вектор описывает угол равный 2π радиан, то угловая частота равна
|
4.Поступательное и вращательное движение твердого тела. Угол поворота, угловая скорость, угловое ускорение. Поступательным назыв. такое движение твердого тела, при котором любая прямая, неизменно связанная с этим телом, остается параллельной своему начальному положению.
Т.. При поступательном движении твердого тела все его точки описывают одинаковые траектории и в каждый данный момент имеют равные по модулю и направлению скорости и ускорения. Вращательным назыв. такое движение твердого тела, при котором две его точки остаются неподвижными за все время движения. При этом прямая, проходящая через эти две неподвижные точки, назыв. осью вращения.
Каждая точка тела, не лежащая на оси вращения, описывает при таком движении окружность, плоскость которой перпендикулярна к оси вращения, и центр ее лежит на этой оси.
Угловая
скорость так же, как и линейная скорость,
есть величина векторная, и этот
вектор |
||||||||||
|
через
Угловое ускорение Быстрота
изменения угловой скорости тела с
течением времени назыв. угловым
ускорением тела
и обозначается
Угол поворота Во всех уравнения вращательного движения углы задаются в радианах, сокращенно (рад). Если φ — угловое перемещение в радианах, s — длина дуги, заключенной м/у сторонами угла поворота, r — радиус, то по определению радиана
|
5.Связь м/у векторами угловых и линейных кинематических величинами. связь м/у линейными и угловыми величинами выражается следующими формулами:
|
6. Классификация вращательных движений твердого тела. Имеется пять видов движения твердого тела: 1)поступательное, если прямая, соединяющая любые две точки тела, перемещается, оставаясь параллельной своему начальному положению, например движение трамвая на прямом участке пути; 2) вращательное, если все точки лежащие на некоторой прямой, называемой осью вращения, остаются неподвижными, например движение двери при открывании и закрывании; 3) плоское, если все точки тела движутся в плоскостях, параллельных некоторой плоскости, неподвижной в рассматриваемой системе отсчета, например качение колеса на прямом участке пути; 4)сферическое, если одна из точек тела остается все время неподвижной в рассматриваемой системе отсчета, например движение гироскопа с тремя степенями свободы в карданном подвесе; 5)свободное, если нет перечисленных выше четырех ограничений, например движение свободного произвольного брошенного тела вблизи поверхности Земли.
|
||||||||||
|
7. Сила. Масса. Импульс. З.ы движения Ньютона. Инерциальные системы отсчёта. Масса тела (m)– мера количества вещества – физическая величина, определяющая инерциальные и гравитационные свойства тела. Единица массы à кг (килограмм). Сила (F) – векторная величина, являющаяся мерой механического воздействия на тело со стороны др. тел или полей, в результате которого тело приобретает ускорение (динамическое проявление сил) или деформируется (статическое проявление сил). Импульс
тела (p = mv) – произведение массы тела
на его скорость. Первый з. Ньютона гласит: Существуют такие системы отсчета, называемые инерциальными, в которых тела движутся равномерно и прямолинейно, если на них не действуют никакие силы или действие др. сил скомпенсировано. Второй з. Ньютона Ускорение тела
(материальной точки) в инерциальной
системе отсчета прямо
пропорционально приложенной к нему
силе и обратно пропорционально массе. Третий з. Ньютона Два
тела воздействуют друг на друга с
силами, противоположными по направлению,
но равными по модулю. |
движущаяся по отношению к И. с. о. поступательно, равномерно и прямолинейно, также является И. с. о. Теоретически может существовать любое число равноправных И. с. о., в которых з.ы физики одинаковы (относительности принцип). СО, движущаяся с ускорением по отношению к И. с. о., неинерциальная, и з. инерции в ней не выполняется.
|
8.Преобразование Галилея. Классический з. сложения скоростей. Принцип относительности в классической механике Если системы отсчета движутся относительно друг друга равномерно и прямолинейно и в одной из них справедливы законы динамики Ньютона, то эти системы являются инерциальными. Установлено также, что во всех инерциальных системах отсчета з.ы классической динамики имеют одинаковую форму; в этом суть механического принципа относительности (принципа относительности Галилея). В классической механике абсолютная скорость точки равна векторной сумме её относительной и переносной скоростей: Данное равенство представляет собой содержание утверждения теоремы о сложении скоростей. Простым языком: Скорость движения тела относительно неподвижной системы отсчёта равна векторной сумме скорости этого тела относительно подвижной системы отсчета и скорости (относительно неподвижной системы) той точки подвижной системы отсчёта, в которой в данный момент времени находится тело. «Стержнем» классической механики стал принцип относительности, сформулированный Галилеем. Он заключается в том, что механическое движение должно считаться относительным, поскольку его характер зависим от избираемой системы отсчета. Т. о., механический принцип относительности Галилея выражен так: з. динамики во всех инерциальных СО обладают одинаковой формой. |
||||||||||
|
9.Механич. сист. Т. об изменении импульса механической системы. З. сохранения импульса. Под механической системой в механике понимается совокупность материальных точек (тел), движения которых взаимосвязаны м/у собой. Т.
об изменении импульса системы: полный
импульс системы можно изменить только
действием внешних сил:
З. сохранения импульса — Векторная сумма импульсов двух тел до взаимодействия равна векторной сумме их импульсов после взаимодействия
|
10. Центр масс механической системы. Т. о движении центра масс. Центром масс механической системы назыв. геометрическая точка, радиус-вектор которой в выбранной системе координат определяется формулой
теорему о движении центра масс: центр масс механической системы движется также, как двигалась бы материальная точка, в которой сосредоточена масса всей системы под действием силы, равной главному вектору внешних сил системы.
|
11. Работа силы. Мощность силы. Работа силы при поступательном перемещении и вращении твердого тела Работа силы — это мера действия силы, зависящая от ее модуля и направления, а также от перемещения точки приложения силы. Для постоянной силы и прямолинейного перемещения работа определяется равенством:
где F —
сила, действующая на тело, Мо́щность
— скалярная физическая величина,
равная в общем случае скорости
изменения, преобразования, передачи
или потребления энергии системы. В
более узком смысле мощность равна
отношению работы, выполняемой за
некоторый промежуток времени, к этому
промежутку времени.
Работа
при поступательном движении равна
произведению силы на перемещение и
на косинус угла м/у ними (рис. 1.63): Величина работы завис. от угла м/у направлением силы и перемещением:
Работа при вращательном движении(рис. 1.69) определяется по формуле
|
||||||||||
|
За единицу работы принимается 1Дж: 1Дж =1Нм. Механич. мощность При поступательном и вращательном движении Мощность— это величина, численно равная работе, совершенной за единицу времени:
|
12. Кинетическая энергия. Т. об изменении кинетической энергии. Кинетическая энергия материальной точки, сист. материальных точек и твердого тела при его поступательном и вращательном движении. Кинетической энергией механической системы называют энергию, зависящую от скоростей движения точек этой системы. Выражение для кинетической энергии можно найти, определив работу равнодействующей силы, приложенной к материальной точке. На основании (2.24) запишем формулу для элементарной работы равнодействующей силы:
Данная т. устанавливает количественную взаимосвязь м/у работой силы (причиной) и кинетической энергией материальной точки (следствием). Кинетической энергией материальной точки назыв. скалярная величина, равная половине произведения массы точки на квадрат ее скорости
Кинетическая
энергия материальной точки — скалярная
положительная величина, равная половине
произведения массы точки на квадрат
ее скорости, т. е.
Кинетическая
энергия механической системы — арифметическая
сумма кинетических энергий всех
материальных точек этой системы
Кинетическая энергия системы, состоящей из п связанных м/у собой тел, равна арифметической сумме кинетических энергий всех тел этой системы:
|
13. Силовые поля. Консервативные силы. Потенциальное поле. Потенциальная энергия. Связь м/у силой и потенциальной энергией. Физическое поле — особая форма материи, связывающая частицы вещества и передающая (с конечной скоростью) воздействие одних тел на др.. Каждому типу взаимодействия в природе соответствует свое поле. Силовым полем называют область пространства, в которой на помещенное туда материальное тело действует сила, зависящая (в общем случае) от координат и от времени. В физике консервати́вные си́лы (потенциальные силы) — это силы, работа которых не завис. от вида траектории, точки приложения этих сил и з.а их движения, и определяется только начальным и конечным положением этой точки[1]. Равносильным определением является и следующее: консервативные силы — это такие силы, работа которых по любой замкнутой траектории равна 0. В некоторых источниках потенциальным полем сил считается только поле с потенциалом, не зависящим от времени. Это связано с тем, что потенциал для сил, зависящий от времени, вообще говоря, не является потенциальной энергией тела, движущегося под действием этих сил. Поскольку силы совершают работу не одномоментно, работа сил над телом будет зависеть от его траектории и от скорости прохождения по ней. Потенциальная энергия— скалярная физическая величина, представляющая собой часть полной механической энергии системы, находящейся в поле консервативных сил. Завис. от положения материальных точек, составляющих систему, и характеризует работу, совершаемую полем при их перемещении. Другое определение: потенциальная энергия — это ф-ия координат, являющаяся слагаемым в лагранжиане системы и |
||||||||||
|
описывающая взаимодействие элементов системы. М/у потенциальной энергией системы взаимодействующих тел и консервативной силой, обусловливающей наличие этой энергии, существует вполне определенная связь. Установим эту связь. 1. Если в каждой точке пространства на тело действует консервативная сила, то говорят, что оно находится в потенциальном поле. 2. При изменении положения тела в этом поле потенциальная энергия тела изменяется, при этом консервативная сила совершает вполне определенную работу. Выразим эту работу обычным образом. 3. В общем случае потенциальная энергия может изменяться не только в направлении r, но и в любом др. направлении. Можно рассматривать, например, изменения En вдоль осей x, y, z, ДКСК. Тогда
|
14.Кинетическая и потенциальная энергии. З. сохранения механической энергии.
З. сохранения механической энергии: Сумма ЕК и ЕП тел, составляющих замкнутую систему и взаимодействующих м/у собой силами тяготения и силами упругости, остаётся неизменной.
|
15. Момент силы. Момент импульса материальной точки и системы материальных точек. Уравнение моментов. Момент силы- произведение модуля силы, вращательного тела на её плечо. Скалярная величина. M=FL (Н*м). Момент импульса: Различают момент импульса материальной точки относительно точки и относительно оси. Момент
импульса материальной точки относительно
некоторой точки назыв. величина, равная
векторному произведению радиус-вектора,
проведённого из точки вращения к
данной материальной точке, на вектор
импульса этой материальной точки:
Т.
о., получаем уравнение моментов:
|
||||||||||
|
16. Момент импульса материальной точки, системы материальных точек и тела. Т. об изменении момента импульса механической системы. З. сохранения момента импульса Различают момент импульса материальной точки относительно точки и относительно оси. Момент
импульса материальной точки относительно
некоторой точки назыв. величина, равная
векторному произведению радиус-вектора,
проведённого из точки вращения к
данной материальной точке, на вектор
импульса этой материальной точки:
Т.
о., получаем уравнение моментов:
З. сохранения момента импульса: Момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени. Момент импульса механической системы не изменяется с течением времени, если суммарный момент внешних сил, действующих на систему, равен нулю:
Это один из фундаментальных з. природы. Аналогично для замкнутой системы, вращающейся вокруг Oz:
|
17.Уравнение динамики вращательного движения твердого тела относительно неподвижной оси. Производная момента импульса твёрдого тела относительно оси равна моменту сил относительно той же оси:
Где
|
18. Момент инерции материальной точки, системы материальных точек и тела. Расчет моментов инерции твердых тел. Момент
инерции материальной точки относительно
оси вращения- произведение массы этой
точки на квадрат кратчайшего расстояния
от оси:
Момент
инерции системы (тела) относительно
оси вращения- физическая величин,
равная сумме произведений масс n
материальных точек системы на квадраты
их расстояний до рассматриваемой оси:
В
случае непрерывного распределения
масс эта сумма сводится к интегралу:
Главный
момент инерции- момент инерции
относительно главной оси вращения,
проходящей через центр масс:
Момент инерции тела завис. от того, относительно какой оси оно вращается, как распределена масса тела по объему. Сист.
материальных точек: Рассмотрим систему,
состоящую из n
материальных точек с заданными массами
m,
где i=1,
2, …, n-
номер частицы. Состояние системы
материальных точек задаётся путём
определения состояния всех материальных
точек, входящих в данную систему: Центр масс (или центр инерции) системы материальных точек- это воображаемая точка С, которая характеризует движение системы этих точек как некого целого, и положение которой характеризуется распределением массы этой системы Ее радиус-вектор равен:
|
||||||||||
|
Момент
инерции твёрдого тела относительно
Oz:
Поскольку
любое реальное твёрдое тело плотности
|
19.Аддитивность момента инерции. Т. Штейнера. Применение свойства аддитивности и теорем Штейнера для расчета моментов инерции твердых тел. Моменты
инерции системы материальных точек
и твёрдого тела определяются
соотношениеми:
Если вычислить сумму первого или второго выражения, томомент инерции юбого тела можно выразить через массу тела, его геометричесие размеры и положение относительно оси вращения. Во многих случаях расчёты существенно упрощаются при использовании двух свойствмомента инерции, которые слдуют из определения этой величины. Первое
свойство (свойство аддиативности).
Момент инерции системы относительно
некоторой оси равен сумме моментов
инерции тел или всех частей системы
относительно этой оси:
Второе
свойство (т. Штейнера). Момент инерции
тела относительно произвольной Oz,
параллельной данной и проходящей
через центр масс тела С, и призведения
массы тела на квадрат расстояния d2
м/у осями:
Эта т. сводит вычисление момента инерции относительно произвольной оси к вычислению момента инерии относительно оси, проходящей через центр масс тела.
|
20. Упругий и неупругий удары твердых тел. З. сохранения энергии, импульса и момента импульса при ударах. Абсолютно
неупругий удар –
столкновение двух тел, в результате
которого они соединяются и далее
двигаются как одно целое. По
з. сохранения импульса Кинетические
энергии до и после удара: Абсолютно упругий удар – столкновение двух тел, в результате которого механич. энергия системы остается прежней. По
з. сохранения импульса и энергии: З. сохранения импульса Сопротивление, которое оказывает тело при попытке привести его в движение или изменить его скорость, назыв. инертностью. Мера инертности – масса. Чем больше масса тела, тем большее оно оказывает сопротивление силам, которые пытаются вывести его из состояния покоя. Чем больше масса тела, тем большее оно оказывает сопротивление силам, которые пытаются изменить его скорость в случае, если тело движется равномерно. Замкнутая сист. (изолированная) – сист. тел, на которую не оказывают влияние др. тела не входящие в эту систему. Тела в такой системе взаимодействуют только м/у собой. Если хотя бы одно из двух условий выше не выполняется, то систему замкнутой назвать нельзя. |
||||||||||
|
Отношение масс двух материальных точек равно отношению приращений скоростей этих материальных точек в результате взаимодействия м/у ними. Импульс
(количество энергии материальной
точки) –
вектор равный произведению массы
материальной точки на вектор ее
скорости — Импульс
системы (количество движения системы
материальных точек) –
векторная сумма импульсов материальных
точек, из которых эта сист. состоит
— Импульс изолированной системы остается постоянным во времени, независимо от взаимодействия м/у ними. З. сохранения энергии Консервативные силы – силы, работа которых не завис. от траектории, а обусловлена только начальными и конечными координатами точки. Формулировка з.а сохранения энергии: В системе, в которой действуют только консервативные силы, полная энергия системы остается неизменной. Возможны лишь превращения потенциальной энергии в кинетическую и обратно. Преобразуем
и получим выражение доказывающее з.
сохранения энергии.
|
21. Деформация твердого тела. Силы упругости. З. Гука. Упругие постоянные Под воздействием внешних сил твёрдые тела меняют свою форму и объем. Это явление называют деформацией. Если после прекращения действия силы тело возвращает свою первоначальную форму и объём, то такая деформация назыв. упругой, или обратимой. Если после прекращения воздействия, тело не приобретает свою первоначальную форму, то деформацию называют пластичной, или необратимой. Типы деформации Деформация
растяжения-сжатия-
вызывается силами, которые приложены
к концам бруса параллельно его
продольной оси и направлены в разные
стороны. Силы, препятствующие деформации,
называются силами
упругости. Деформация
сдвига- если
приложить внешнюю силу по касательной
к поверхности бруска, нижняя часть
которого закреплена, то возникает деформация
сдвига.
В этом случае параллельные слои тела
как бы сдвигаются относительно друг
друга. Деформация
изгиба- такая
деформация возникает, если концы бруса
или стержня лежат на двух опорах. В
этом случае на него действуют нагрузки,
перпендикулярные его продольной оси. Деформация
кручения- Кручение
возникает в теле, если приложить пару
сил к его поперечному сечению. В этом
случае поперечные сечения будут
поворачиваться вокруг оси тела и
относительно друг друга. Формулировка з.а Гука: сила упругости, которая появляется в момент деформации тела, пропорциональна удлинению тела и |
направлена
противоположно движению частиц этого
тела относительно др. частиц при
деформации.
Сила упругости - это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости: 1. действует м/у соседними слоями деформированного тела и приложена к каждому слою;2. действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример - сила реакции опоры).
|
||||||||||
|
22. Силы упругости. Работа сил упругости. Потенциальная энергия упруго деформированного тела. Сила упругости - это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости: 1. действует м/у соседними слоями деформированного тела и приложена к каждому слою;2. действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример - сила реакции опоры). Работа
силы упругости: Работа силы упругости не завис. т траектории движения тела. Сила пругости является консерваивной. Консервативная сила- сила, работа которой в замкнутом контуре равна нулю. ЕП
упруго деформированного тела:
|
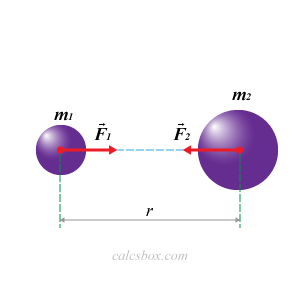
23. З. всемирного тяготения. Гравитационное поле. Напряженность гравитационного поля. З.
всемирного тяготения м/у
любыми материальными точками существует
сила взаимного притяжения, прямо
пропорциональная произведению их
масс и обратно пропорциональная
квадрату расстояния м/у ними, действующая
по линии, соединяющей эти точки.
Гравитационное
поле,
или поле
тяготения –
одно из физических
полей,
через которое осуществляется
гравитационное взаимодействие
объектов, как и гравитационное
воздействие на др. объекты. Напряжённость
гравитацио́нного по́ля — векторная
величина, характеризующая гравитационное
поле в данной точке и численно равная
отношению силы тяготения, действующей
на тело, помещённое в данную точку
поля, к гравитационной массе этого
тела: Если
источником гравитационного поля
является некое гравитирующее тело,
то согласно з.у всемирного тяготения: G — гравитационная постоянная; MG — гравитационная масса тела-источника поля; R — расстояние от исследуемой точки пространства до центра масс тела-источника поля. |
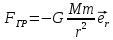
24. Гравитационное поле. Работа сил гравитационного поля. Потенциальная энергия тела в гравитационном поле. Потенциал гравитационного поля Гравитационное поле, или поле тяготения – одно из физических полей, через которое осуществляется гравитационное взаимодействие объектов, как и гравитационное воздействие на др. объекты. Работа
гравитационной силы: Пусть в точке О
пространства находится неподвижное
тело (материальная точка) массы М,
которое действует на частицу А массы
m
с силой Fгр.:
Здесь r- проведённый из точки О, к частице А радиус-вектор, r- его модуль, еr- сонаправленный с r единичный вектор, G- гравитационная постоянная. Энергия частицы в гравитационном поле: Гравитационное
поле является потенциальным, и в нем
выполняется, наряду с з.ом сохранения
импульса, з. сохранения энергии:
|
||||||||||
|
Гравитационный
потенциал поля точечной (или сферически
симметричной) массы М на расстоянии
r
от нее равен работе, которую необходимо
затратить, чтобы принести единичную
массу с бесконечности в данную точку.
Т. к. гравитационные силы м/у двумя
массами- это силы притяжения, то эта
работа отрицательна:
Напряжённость
гравитационного поля
|
25.Гравитационное поле земли. Космические скорости. Сила тяжести. Вес тела. Невесомость Гравитационное поле, или поле тяготения – одно из физических полей, через которое осуществляется гравитационное взаимодействие объектов, как и гравитационное воздействие на др. объекты. Космическая скорость: Первая
космическая- скорость кругового
движения на около земной орбите:
Вторая
космическая скорость необходима для
преодоления земного тяготения: Третья
космическая скорость космического
аппарата, необходимая для преодоления
гравитации Солнца:
Сила
тяжести- это гравитационная сила, с
которой тела притягиваются к Земле.
g=9,8 м/с2- ускорение свободного падения; m- масса тела. Вес тела- это сила упругости, с которой деформированное тело действует на горизонтальную опору (или вертикальный подвес). Приложен к опоре (или подвесу); Направлен против силы упругости; Рассчитывается
по формуле:
Невесомость- это отсутствие веса при наличии массы тела. В невесомости тело не действует на опору или подвес. Р=0.
|
26.Явление трения покоя, скольжения и качения. Явление вязкого трения. Виды трения: Трение покоя (тело покоится на поверхности другого тела); Трение скольжения (скольжение одного тела по поверхности другого тела);Трение качения (если одно тело катится по поверхности другого тела). Вязкость.
Явление внутреннего трения описывается
формулой Ньютона:
|
||||||||||
|
27.Гармонические колебания и их харки. Диф уравнение свободных гармонических колебаний. Энергия гармонических колебаний. Гармонические колебания. Гармоническими колебаниями называются колебания, в которых физ. Величина x(отклонение маятника от состояния равновесия) изменяется по гармоническому закону. Наибольшее абсолютное значение величины называется амплитудой колебания – А. Текущее отклонение маятника от состояния равновесия Ф (текущий угол отклонения) называется фазой колебания. Начальное
отклонения маятника
Дифференциальное уравнение гармонических колебаний.
Сила пропорциональна смещению(квазиупругая, возвращающая)
Энергия колебаний.
|
Материальная точка, совершающая прямолинейные гармонические колебания, обладает энергией. Кинетическая
энергия.
Потенциальная
энергия.
Полная
энергия. Закон сохранения энергии.
|
28. Пружинный, физический и математический маятник. Виды маятников. Пружинный
маятник – груз, прикрепленный к
пружине, массой которой можно пренебречь.
Математический
маятник – материальная точка,
подвешенная на тонкой нерастяжимой
и невесомой нити.
Физический
маятник – твердое тело, совершающее
колебания в поле каких-либо сил
относительно точки, не являющейся
центром масс этого тела, или неподвижной
горизонтальной оси, не проходящей
через центр масс этого тела.
|
||||||||||
|
29. Затухающие колебания. Диф уравнение затухающих колебаний. Амплитуда затухающих колебаний. Логарифмический декремент затухания. Затухающие колебания. Затухающими
колебаниями называются колебания,
энергия которых уменьшается со
временем. Амплитуда затухающих
колебаний уменьшается со временем в
зависимости от коэффициента затухания
Уравнение затухающих колебаний
Логарифмический
декремент затухания – величина,
являющаяся мерой снижения амплитуды
колебаний за один период, натуральный
логарифм отношения амплитуд двух
последовательных колебаний:
|
30. Вынужденные колебания. Диф уравнение вынужденых колебаний. Вынуждеными колебаниями называются колебания, происходящие под действием внешней переменной (периодической) силы, работа которой компенсирует потери энергии на преодоление трения(в механических колебательных системах) и на преодоление электрического сопротивления(в электрических колебательных системах). Дифференциальное
уравнение вынужденных колеюаний
пружинного маятника:
|
31.Амплитуда и фаза вынужденных колебаний. Резонанс. Амплитуда вынужденных колебаний (А) зависит от многих параметров:
Амплитуда
будет максимальна, если частота
При
этом наблюдается явление резонанса.
Резонанс- это резкое возрастание
амплитуды А вынужденных колебаний
при совпадении частоты действия
вынуждающей силы
Если
бы затухание в системе отсутствовало
(
Фаза
вынужденных колебаний:
|
||||||||||
|
32. Сложение гармонических колебаний одного направления. Биение. Биение- это колебания с периодически уменьшающейся и увеличивающейся амплитудой, возникающие при сложении двух колебаний одного направления с близкими, но не кратными частотами. Частота изменения амплитуды суммарного сигнала равна разности частот двух исходных сигналов. Сложим
2 гармонических колебания с равными
амплитудами и начальными фазами
равными нулю, учитывая, что
Получившееся
выражение является произведением
двух колебаний и описывает гармоническое
колебание с частотой
|
33. Сложение взаимно-перпендикулярных гармонических колебаний. Пусть
частица участвует одновременно в двух
взаимно перпендикулярных колебаниях
одной частоты. Пусть колебания вдоль
оси Х происходят с нулевой начальной
фазой, а вдоль оси У со сдвигом по фазе
на
Чтобы
получить уравнение траектории в явном
виде, исключим время. Из первого
уравнения следует, что
Подставим
синус и косинус в формулу У, получим:
Возведём
уравнение в квадрат и получим уравнение
элипса. Полуоси этого элипса, в общем
случае, не совпадают с осями координат:
|
34. Распространение колебаний в упругой среде. Уравнение плоской и сферической волны. Фазовая скорость волны. Длина волны. Волновой вектор. Процесс распространения колебаний в упругой среде называется волной. При распространении волны частицы не движутся вместе с волной, а колеблются около своих положений равновесия. Основное свойство волн- перенос энергии без переноса вещества. Уравнение бегущей волны: Плоская
волна:
Сферическая
волна:
Фазовая скорость волны. Фазовая
скорость Связь
длины волны ʎ, фазовой скорости Учитывая,
что . Для волнового процесса характерна периодичность по времени и по пространству. Т
– период колебаний точек среды. Роль
пространственного периода играет
длина волны |
||||||||||
|
формулой: еще
одно уравнение для фазовой скорости:
Длина
волны- это расстояние, за которое
распространяется влна за время, авное
периоду колебаний.
Волновой
вектор:
|
35. Волновое уравнение. Фазовая скорость волн в твёрдых телах, жидкостях и газе. Волновое
уравнение: Распространение вон в
однородной изотропной среде, в общем
случае записывается ВОЛНОВЫМ УРАВНЕНИЕМ-
специальным дифференцированным
уравнением в частных производных.
Фазовая
скорость волны, т.е. скорость, с которой
перемещается в пространстве данная
фаз волны, зависит от среды, в которой
распространяется волна:
Фазовая
скорость упругой волны в газе, где
Фазовая
скорость продольной упругой волны в
твёрдом теле, где Е- модуль Юнга,
Фазовая скорость поперечной упругой волны в твёрдом теле, где G- модуль сдвига.
|
36.Энергия упругой волны. Плотность энергии. Вектор Умова. Энергия упругой волны. Рассмотрим продольную плоскую волну в твёрдой среде: Деформация
среды в плоскости Х:
Нормальное
напряжение пропорционально деформации
(для малых деформаций):
Вектор
Умова указывает направление, вдоль
которого переносится энергия волнс
определённой скоростью:
37. Волновой пакет. Групповая скорость. Дисперсия упругих волн. Формула Релея. Волновой пакет (группа волн)- суперпозиция волн, мало отличающихся друг от друга по частоте. Групповая
скорость- скорость распространения
центра волнового пакета (точка с
максимальным значением А):
Скорость
перемещения пакета
Дисперсия
волны- зависимость фазовой скорости
волны в среде от его частоты. Групповая
скорость зависит от фазовых скоростей
различных волн, входязих в волновой
пакет. Зависимость между фазовой и
групповой скоростями и длиной волны
была получена Рэллем и имеет вид:
Формула
Рэлея-Джинса: Рэлей и Джинс сделали
попытк определить равновесную плотность
излучения абсолютно чёрного тела из
теоремы классической статистики о
равномерном распределении энергии
по степеням свободы. На каждую степень
свободы приходится в среднем Kt.
В резльтате они получили:
|
||||||||||
|
38. Постулаты специальной теории относительности. Преоброзование Лоренца. Постулаты специальной теории относительности (СТО): Принцип относительности. Все инерциальные системы отсчёта равноправны. Во всех инерциальных СО не только механические, но и другие явления природы протекают одинаково. Принцип
постоянства скорости света (порождает
принцип причинности). Во всех инерциальных
СО скорость света в вакууме одинакова
и равна
Далее
найдём преобразования времени для
системы К и К’.
Для этого в полученные преобразования
координат подставим t
и t’
из выражений
|
39.Следствия частной (специальной) теории относительности. Относительность расстояния и промежутков времени. Следствия из постулатов теории относительности: Относительность расстояний- расстояние не является абсолютной величиной, оно зависит от скорости движения тела относительно данной СО. Длина
тела зависит от скорости, чем больше
скорость, тем меньше длина тела в
направлении движения:
Релятивистское сокращение размеров: При движении с околосветными скоростями длина тела зависит от скорости, чем больше скорость, тем меньше дина тела в направлении движения. Относительность промежутков времени. Интервал
времени между двумя событиями ПСО
меньше, чем интерва времени между
этими же событиями в НСО:
|
40.Преобразование Лоренца. Релятивистский закон сложения скоростей. Далее
найдём преобразования времени для
системы К и К’.
Для этого в полученные преобразования
координат подставим t
и t’
из выражений
Найдём
отношение
|
||||||||||
|
41. Релятивисткая масса. Релятивистский импульс. Релятивистское уравнение динамики. Релятивистские выражения для кинетической энергии. Релятивистская
масса:
Релятивистский
импульс:
Релятивистское
уравнение динамики:
Релятивистское
выражение для кинетической энергии:
При
малых скоростях:
|
42. Связь между массой и энергией. Энергия покоя. Релятивистское выражение для кинетической энергии. Релятивистское соотношение между полной энергией и импульсом частицы. Релятивистское
выражение для кинетической энергии:
При
малых скоростях:
Энергия
покоя: при
Связь
между массой и энергией:
Релятивистское
соотношение между полной энергией и
импульсом частицы:
|
43. Идеальный газ. Уравнение состояния идеального газа. Законы идеально газа Идеальный
газ- это газ, взаимодействие между
молекулами которого пренебрежимо
мало. Многие газы при нормальных
условиях хорошо описываются такой
моделью. Уравнение состояния идеального
газа:
Менделеев
объединил известные законы Бойля-Мариотта,
Гей-Люсака и Шарля с законом Авогадро:
Законы идеальных газов: Адиабатический процесс (изоэнтропийный). Адиабатический процесс- термодинамический процесс, происходящий без теплообмена с окружающей средой. Политропический процесс. Процесс, при котором теплоёмкость газа остаётся постоянной. Закон Авогадро. При одинаковых давлениях и одинаковых температурах, в равных объёмах различных идеальных газов содержится одинаковое число молекул.
|
||||||||||
|
44.Термодинамический метод. Внутренняя энергия термодинамической системы. Работа и теплота. Первое начало термодинамики. Теплоемкость. Термодинамический метод: Термодинамика- теория описания процессов в молекулярной системе с помощью макропараметров. Классическая термодинамика изучает только равновесные состояния и прцессы. Термодинамическое равновесие- состояние системы, когда во всех ее частях значения макропараметров одинаковы. Связь макропараметров системы называется уравнением состояния. Уравнение
состояния идеального газа
Менделеева-Клапейрона:
Классическая термодинамика представляет собой теорию динамического типа. Внутренняя
энергия термодинамической системы:
Энергия системы:
Теплота и работа: Теплота- процесс передачи внутренней энергии обусловленный наличием неоднородного температурного поля. Работа- процесс передачи внутренней энергии, обусловленный изменением объёма газообразного рабочего тела. Теплота и работа- есть способы взаимодействия системы с окружающей средой и зависят от графика термодинамического процесса. Первое
начало термодинамики- это закон
сохранения энергии, учитывающий обмен
энергией между системой и окружающей
средой по разным каналам: Количество
теплоты, сообщенное системе, идёт на
приращение внутренней энергии и
совершение системой работы над внешними
телами:
Теплоёмкость
тела- величина, равная количеству
теплоты, которую надо сообщить телу,
чтобы повысить его температуру на 1
градус для нагревания этого тела на
один градус:
|
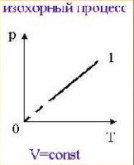
45.Идеальный газ. Изохорный, изобарный и изотермический процессы идеального газа. Идеальный
газ- это газ, взаимодействие между
молекулами которого пренебрежимо
мало. Многие газы при нормальных
условиях хорошо описываются такой
моделью. Уравнение состояния идеального
газа:
Изотермический
Изобарный
Изохорный
|
46. Идеальный газ. Адиабатный процесс идеального газа. Идеальный
газ- это газ, взаимодействие между
молекулами которого пренебрежимо
мало. Многие газы при нормальных
условиях хорошо описываются такой
моделью. Уравнение состояния идеального
газа:
Адиабатный процесс- процесс, который происходит без теплообмена с внешней средой.
В ходе адиабатного процесса газ совершает работу за счёт изменения внутренней энергии.
|
||||||||||
|
|
|
|
||||||||||






 - з.
вращательного движения тела.
- з.
вращательного движения тела.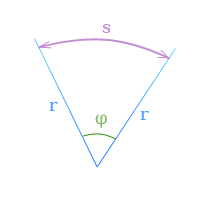





 ИНЕРЦИА́ЛЬНАЯ
СИСТЕ́МА ОТСЧЁТА, СО,
в которой справедлив з. инерции:
материальная точка, если на неё не
действуют никакие силы (или действуют
взаимно уравновешенные силы), находится
в состоянии покоя или равномерного
прямолинейного движения. Всякая СО,
ИНЕРЦИА́ЛЬНАЯ
СИСТЕ́МА ОТСЧЁТА, СО,
в которой справедлив з. инерции:
материальная точка, если на неё не
действуют никакие силы (или действуют
взаимно уравновешенные силы), находится
в состоянии покоя или равномерного
прямолинейного движения. Всякая СО, (1),
т.е. производная импульса системы по
времени равна векторной сумме
всехвнешних сил, действующих на частицы
системы. Как и в случае одной частицы,
из выражения (1) следует, что приращение
импульса системы равно импульсу
результирующей всех внешних сил за
соответствующий промежуток времени:
(1),
т.е. производная импульса системы по
времени равна векторной сумме
всехвнешних сил, действующих на частицы
системы. Как и в случае одной частицы,
из выражения (1) следует, что приращение
импульса системы равно импульсу
результирующей всех внешних сил за
соответствующий промежуток времени:

 где n -
число материальных точек системы, mk
- массаk-й
точки,
где n -
число материальных точек системы, mk
- массаk-й
точки,  -
ее радиус-вектор,
-
ее радиус-вектор,
масса всей системы.
масса всей системы.
 — перемещение,
— перемещение,  —
угол м/у силой и перемещением.
—
угол м/у силой и перемещением.








 .
.



 .
Это уравнение показывает, что производная
по времени момента импульса частично
равна моменту действующей на неё силы.
.
Это уравнение показывает, что производная
по времени момента импульса частично
равна моменту действующей на неё силы.
 .
Это уравнение показывает, что производная
по времени момента импульса частично
равна моменту действующей на неё силы.
.
Это уравнение показывает, что производная
по времени момента импульса частично
равна моменту действующей на неё силы.










 и объёмом V
есть совокупность бесконечно большого
числа частиц, то
и объёмом V
есть совокупность бесконечно большого
числа частиц, то




 .
.
 и
и  .
.
 ,
,  .
.
 .
.




 ,
где Fупр –
соответственно сила упругости, x –
удлинение тела (расстояние, на которое
изменяется исходная длина тела), а k –
коэффициент жёсткости.
,
где Fупр –
соответственно сила упругости, x –
удлинение тела (расстояние, на которое
изменяется исходная длина тела), а k –
коэффициент жёсткости.




 (+ рисунок из 23 вопр.:
(+ рисунок из 23 вопр.:
 )
)
 часто называют ускорением свободного
падения g,
где
часто называют ускорением свободного
падения g,
где





 ,
где ŋ – коэффициент динамической
вязкости [Па*с]. При увеличении
температуры вязкость у жидкостей
уменьшается, а у газов увеличивается.
,
где ŋ – коэффициент динамической
вязкости [Па*с]. При увеличении
температуры вязкость у жидкостей
уменьшается, а у газов увеличивается. (угол
отклонения) от состояния равновесия
называется начальной фазой.
(угол
отклонения) от состояния равновесия
называется начальной фазой.


 =>
=>


 )=>
)=> – решение этого дифференциального
уравнения – гармоническая функция:
если вторая производная по времени
какой-либо физической величины
пропорциональна самой величине с
противоположным знаком, то данная
физическая величина изменяется со
временем по гармоническому закону.
– решение этого дифференциального
уравнения – гармоническая функция:
если вторая производная по времени
какой-либо физической величины
пропорциональна самой величине с
противоположным знаком, то данная
физическая величина изменяется со
временем по гармоническому закону.
 ,
,

 ,
,
 . Чем больше m
– тем больше период колебаний. Чем
больше k
– тем меньше период и амплитуда
колебаний.
. Чем больше m
– тем больше период колебаний. Чем
больше k
– тем меньше период и амплитуда
колебаний. .
.
 .
Затухающие колебания являются
непереодическими, т.к. в них никогда
не повторяются значения физических
величин. Условным периодом колебаний
называется промежуток времени, через
который физические величины принимают
аналогичные значения. Циклическая
частота затухающий колебаний показывает,
сколько раз за
.
Затухающие колебания являются
непереодическими, т.к. в них никогда
не повторяются значения физических
величин. Условным периодом колебаний
называется промежуток времени, через
который физические величины принимают
аналогичные значения. Циклическая
частота затухающий колебаний показывает,
сколько раз за
 секунд маятник проходит положение.
секунд маятник проходит положение. ,
,
 ,
, ,
, ,
,
 – однородное
линейное дифференциальное уравнение
второго порядка.
– однородное
линейное дифференциальное уравнение
второго порядка.
 ,
можно представить в виде:
,
можно представить в виде:
 ;
; ;
; ;
; ;
; действия вынуждающей силы определяется
формулой:
действия вынуждающей силы определяется
формулой:

 с частотой системы
с частотой системы
 ,
т.е.:
,
т.е.:

 ),
то резонанс наступал бы при условии:
),
то резонанс наступал бы при условии:
 ,
где
,
где
 -
собственная частота колебания. При
этом амплитуда достигала бы бесконечно
большого значения.
-
собственная частота колебания. При
этом амплитуда достигала бы бесконечно
большого значения.
 :
:

 и амплитудой
и амплитудой
 ,
изменяющейся по периодическому закону:
,
изменяющейся по периодическому закону:
 .
. .
Тогда уравнения колебаний примут вид:
.
Тогда уравнения колебаний примут вид:


 -
это скорость распространения данной
фазы колебаний, т.е. скорость волны.
-
это скорость распространения данной
фазы колебаний, т.е. скорость волны. и
периода колебаний Т задается
соотношением:
и
периода колебаний Т задается
соотношением:
 ,
где
,
где  - линейная
частота волны, T -
период, а циклическая
частота волны
- линейная
частота волны, T -
период, а циклическая
частота волны  ,
получим разные формулы для фазовой
скорости:
,
получим разные формулы для фазовой
скорости:


 .
Волнвой сектор направлен в сторону
распространения волны и численно
равен отношению циклической частоты
распространяющихся колебаний к фазовой
скорости. Модуль волнового вектора
называют волновым числом:
.
Волнвой сектор направлен в сторону
распространения волны и численно
равен отношению циклической частоты
распространяющихся колебаний к фазовой
скорости. Модуль волнового вектора
называют волновым числом:



 -
коэффициент Пуассона,
-
коэффициент Пуассона,
 -
молярная масса газа, Т- температура,
R-
универсальная газовая постоянная:
-
молярная масса газа, Т- температура,
R-
универсальная газовая постоянная:
 .
. -
плтность вещества:
-
плтность вещества:
 .
. (взят символ частной производной, т.к.
S=S(t))
(взят символ частной производной, т.к.
S=S(t)) ,
где Е- модуль Юнга среды.
,
где Е- модуль Юнга среды.
 .
. совпадает с фазовой скоростью
совпадает с фазовой скоростью
 ,
если нет зависимости в среде фазовой
скорости от частоты.
,
если нет зависимости в среде фазовой
скорости от частоты. .
.
 .
. и x=ct,
откуда
и x=ct,
откуда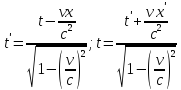 .Полученные
преобразования координат и времени
называются преобразованиями Лоренца.
В отличии от преобразований Галилея,
данные преобразования справедливы
также и для движения тел со скоростями,
близкими к скорости света.
.Полученные
преобразования координат и времени
называются преобразованиями Лоренца.
В отличии от преобразований Галилея,
данные преобразования справедливы
также и для движения тел со скоростями,
близкими к скорости света.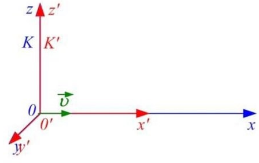

 ,
где
,
где
 промежуток
времени между двумя событиями в СО,
движущейся относительно НСО со
скоростью
промежуток
времени между двумя событиями в СО,
движущейся относительно НСО со
скоростью
 (собственное
время); t-промежуток
времени между двумя событиями в НСО;
c-
скорость света в вакууме.
(собственное
время); t-промежуток
времени между двумя событиями в НСО;
c-
скорость света в вакууме. и x=ct,
откуда
и x=ct,
откуда .Полученные
преобразования координат и времени
называются преобразованиями Лоренца.
В отличии от преобразований Галилея,
данные преобразования справедливы
также и для движения тел со скоростями,
близкими к скорости света.
.Полученные
преобразования координат и времени
называются преобразованиями Лоренца.
В отличии от преобразований Галилея,
данные преобразования справедливы
также и для движения тел со скоростями,
близкими к скорости света.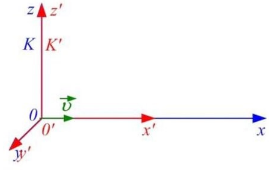
 ,
которое имеет смысл скорости перемещения
тела
,
которое имеет смысл скорости перемещения
тела
 в СО К:
в СО К:
 .
Полученное соотношение и есть формула
релятивистского закона сложения
скоростей. Видно, что даже если обе
скорости
.
Полученное соотношение и есть формула
релятивистского закона сложения
скоростей. Видно, что даже если обе
скорости
 равны скорости света с, то U
равны скорости света с, то U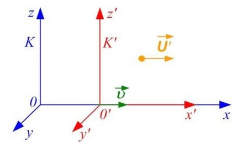
 ,
,
 -
релятивистская масса тела. Она зависит
от того, в какой СО её определяют. Масса
тела не зависит от скорости движения
тела.
-
релятивистская масса тела. Она зависит
от того, в какой СО её определяют. Масса
тела не зависит от скорости движения
тела. ,
по мере увеличения скорости движения
масса тела, определяющая его инертные
свойства, увеличивается.
,
по мере увеличения скорости движения
масса тела, определяющая его инертные
свойства, увеличивается. .
Из этого уравнения следует, чт вектор
ускорения частицы, в общем случае, не
совпадает по направлению с вектором
силы.
.
Из этого уравнения следует, чт вектор
ускорения частицы, в общем случае, не
совпадает по направлению с вектором
силы.


 ,
,
 ,
эта величина называется энергией
покоя и имеет чисто релятивистское
происхождение. В классической механике
такой энергии нет.
,
эта величина называется энергией
покоя и имеет чисто релятивистское
происхождение. В классической механике
такой энергии нет. .
Энергия и масса- это две взаимосвязанные
характеристики любого физического
объекта. Энергия тела или системы тел
равна массе, умноженной на квадрат
скорости света. Любое тело обладает
энергией, которая пропорциональна
массе покоя
.
Энергия и масса- это две взаимосвязанные
характеристики любого физического
объекта. Энергия тела или системы тел
равна массе, умноженной на квадрат
скорости света. Любое тело обладает
энергией, которая пропорциональна
массе покоя
 .
. .
Фотон обладает импульсом, при соударении
с поверхностью, фотон отдаёт ей свой
импульс. Следовательно, свет, падающий
на тело, оказывает на неё давление.
Давление света на поверхность равно
импульсу, который передаёт N
фотонов в одну секунду:
.
Фотон обладает импульсом, при соударении
с поверхностью, фотон отдаёт ей свой
импульс. Следовательно, свет, падающий
на тело, оказывает на неё давление.
Давление света на поверхность равно
импульсу, который передаёт N
фотонов в одну секунду:

 .
.
 .
.
 .
.
 .
. -
это уравнение Менделеева-Клапейрона
для смеси газов.
-
это уравнение Менделеева-Клапейрона
для смеси газов. .
. ,где
,где
 -кинетическая
энергия поступательного движения
системы как целого;
-кинетическая
энергия поступательного движения
системы как целого;
 -
потенциальная энергия системы во
внешнем поле; U-
внутренняя энергия системы.
-
потенциальная энергия системы во
внешнем поле; U-
внутренняя энергия системы. .
.
 .
. или
или
 Закон Бойля-Мариотта.
Закон Бойля-Мариотта. или
или
 Закон Гей-Люссака.
Закон Гей-Люссака. или
или
 Закон Шарля.
Закон Шарля.

 .
.