

Міністерство освіти і науки України
Сумський державний університет
Кафедра комп'ютерних наук
Секція комп'ютеризованих систем управління
Звіт
до лабораторної роботи №3
з дисципліни «Локальні системи автоматики»
на тему: «Дослідження аналогових і дискретних П, ПІ і ПІД регуляторів»
Варіант 12
Виконав:
студент гр. СУ-61
Самара В.Р.
Перевірив:
к.т.н., доцент Толбатов В.А.
Тема:
Дослідження аналогових і дискретних П, ПІ і ПІД регуляторів
Ціль:
- Дослідження аналогових і дискретних П, ПІ і ПІД регуляторів в пакеті Simulink;
-отримання навичок реалізації дискретних передавальних функцій з використанням масштабних коефіцієнтів і блоків затримки;
- отримання навичок реалізації блоків систем регулювання з використанням пакетів Simulink і PowerSystemBlockset;
- Дослідження віртуальних моделей аналогових регуляторів.
Порядок виконання роботи
В m-файлі передавальні функції аналогових регуляторів визначені в першому блоці програми 1. Перехід від аналогових передавальних функцій до z-передавальних функцій здійснюється другим блоком програми 1. Перехід до z-передавальних функцій у вигляді фільтра, які використовуються при проектуванні фільтрів і в мікропроцесорній техніці при написанні програм, що реалізують алгоритм дискретних регуляторів, наведені в третьому блоці програми 1.
%Перший блок
h1=tf(Kp) %Передатна функція П-регулятора
h2=tf([Kp,K1] , [1,0]) %Передатна функція ПІ-регулятора
h3=tf([Kd,Kp,K1] , , [Tm,1,0]) %Передатна функція ПІД-регулятора
%Другий блок
t=Tn %Задання інтервала дискретності
hd1=c2d(h1,t) %z- передатна функція П-регулятора
hd2=c2d(h2,t) % z- передатна функція ПІ-регулятора
hd3=c2d(h3,t) % z- передатна функція ПІД-регулятора
%Третій блок
n=[n1,n2,…,nm] %Коефіцієнт полінома чисельника
d=[d1,d2,…,dm] % Коефіцієнт полінома знаменника
hf=filt(n,d,t) %% z- передатна функція в формі фільтру
За аналоговим і дискретним передавальним функціям в пакеті Simulink (Рис.1) збираємо структурні схеми аналогового (Рис.1, А) і дискретного (Рис.1, Б) ПІ-регуляторів.
Для уявлення принципової схеми регулятора використовуються масштабні підсилювачі і лінії затримок. Для цього z- передавальну функцію регулятора, задану у формі фільтра, слід вирішити щодо вихідної величини.
Принципові схеми цифрових регуляторів (Рис.1.Б, В, Д) відрізняються коефіцієнтами посилення масштабних підсилювачів. Схеми Рис.1.В і Рис.1.Б використовують прямокутну апроксимацію, і їх відмінність полягає в різному поданні паралельних гілок. Тому їх перехідні характеристики будуть збігатися. У схемі по Рис.1.Д використовується цифрове інтегрування за методом трапецій, що відбивається в перехідних характеристиках.

Рисунок 1 - Схема досліджуваних регуляторів (А - безперервні передавальні функції; Б - z-передавальні функції; В, Г, Д - принципові схеми на лініях затримки)
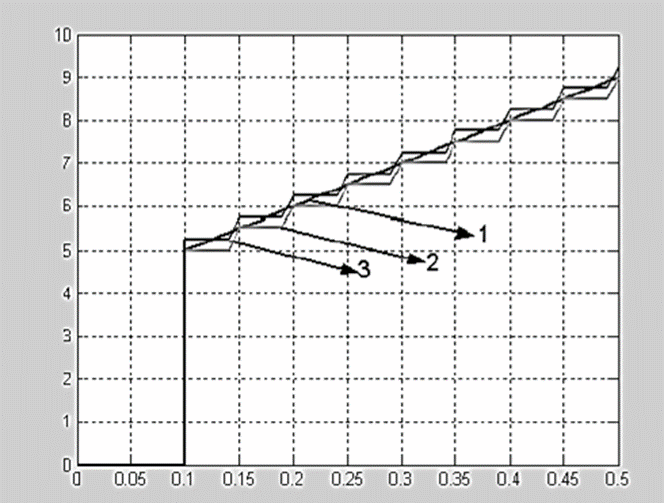
Рисунок 2 - Перехідні характеристики ПІ-регуляторів (1 -аналогового регулятора; 2 -дискретних регуляторів, що використовують прямокутну апроксимацію; 3 -дискретного регулятора, що використовує трапецієдальну апроксимацію)
Перехідні характеристики дискретних сигналів в моменти квантування за часом мають похилі ділянки, величина яких залежить від кроку квантування і вибору вирішувача. При зменшенні кроку квантування і застосуванні жорсткого вирішувача похилі ділянки зникають.
З Рис.2 випливає, що перехідні характеристики аналогового (крива 1) і дискретних (крива 2) регуляторів в дискретні моменти часу збігаються, що свідчить про правомірність переходу від безперервного подання процесу до дискретного подання. Криві, що характеризують схеми Рис.1.Б, Рис.1.В і Рис.2.Г однакові і на графіку вони представлені однією кривою (крива 2). Схема на Рис.1.Д використовує трапецієдальну апроксимацію, що вносить відмінність у перехідні характеристики цифрового регулятора (крива 3).
Передавальну функцію аналогового ПІД-регулятора доцільно представити у вигляді паралельного з'єднання передавальної функції ПІ-регулятора:

З функцією передачі реальної диференційованої ланки:

Z-передаточная функция этого соединения определяет в m-файле:


Рисунок 3 - Структурні та принципові схеми ПІД-регуляторів, задані: А, Б - безперервними і дискретними передавальними функціями, В - принциповими схемами

Рисунок 4 - Перехідні процеси ПИД- регулятора (1 - в аналоговому регуляторі, 2,3 - в дискретному регуляторі, реалізованому за структурою Рис.3.Б і Рис.3.В)
Збіг характеристик аналогових і дискретних регуляторів в дискретні моменти часу свідчить про правомірність заміни безперервних рівнянь різницевими рівняннями.
У фізичних системах регулятори, як правило, реалізуються на операційних підсилювачах (Рис.5), передавальна функція яких визначається як відношення операційних опорів зворотного зв'язку до вхідного опору.

Рисунок 5 - Принципова схема ПІ-регулятора
ПІ-регулятор складається з паралельного з'єднання, підсилювального і інтегруючого ланок, параметри яких визначаються системою управлінь:


де Кп, Ті - коефіцієнт посилення і постійного часу інтегрування регулятора.
Поставивши собі за одним параметром, наприклад ємністю, за заданим значенням Кп, Ті визначаються резистори регулятора.
На Рис.6 представлена віртуальна модель ПІ-регулятора, в якій вхідний резистор і ланцюга зворотного зв'язку реалізована в пакеті PowerSystemBlockset, а операційний підсилювач, акумулятор, блок завдання Constant і нелінійний елемент взяті з бібліотеки Simulink.

Рисунок 6 - Віртуальна модель ПІ-регулятора
Зв'язок елементів пакету Simulink з елементами пакету PowerSystemBlockset здійснюється блоками Controlled Voltage Source, а перехід від елементів пакету PowerSystemBlockset до елементами пакету Simulink виконаний блоками Voltage Measurement.
Операційні підсилювачі, на яких реалізуються регулятори, повинні мати великий (більше 100.000) коефіцієнт посилення, від величини якого залежить точність математичних операцій, виконуваних регулятором. Ми взяли, що коефіцієнт підсилення операційного підсилювача равен106, що призводить до практично безпомилковим математичним перетворенням.
У фізичної моделі регулятора на вхід операційного підсилювача подається різниця струмів, що визначається параметрами вхідного ланцюга і ланцюга зворотного зв'язку. У віртуальній моделі регулятора це досягається вимірювачами струму (блоки Current Measurement) і сумматором.
Налаштування регулятора відповідно до заданним Кп, Ті визначається зміною параметрів послідовної RLC-ланцюга (блок Series RLS Rranch). Для виключення ємності в вікні Capacitance блоку параметрів слід поставити inf (нескінченність).

Рисунок – 7 Перехідні характеристики ПІ-регулятора
В реальних умовах на вхід регулятора крім корисного сигналу подається і перешкоди. Якщо сумарний сигнал в деяких моментах часу перевищує рівень обмеження, то підсилювач входить в насичення, що зменшує коефіцієнт посилення. На Рис.8 представлена віртуальна модель П- регулятора, що дозволяє досліджувати цей ефект. Амплітуда перешкоди задається амплітудою гармонійного сигналу, а обчислювальний пристрій, що складається з блоку множення, інтегратора і реєстратора, визначає напругу на виході регулятора. Так як на вхід інтегратора подається одиничний сигнал, то вихідна напруга реєстратора визначає і коефіцієнт посилення регулятора.

Рисунок 8 - Віртуальна модель П- регулятора
Змінюючи положення робочої точки і амплітуду перешкоди, є можливість визначати характеристики регуляторів з урахуванням дії промислових перешкод.
Висновки: при виконанні лабораторної роботи були досліджені аналогові й дискретні П, ПІ і ПІД - регулятори в пакеті Simulink; отримані навички реалізації дискретних передавальних функцій з використанням масштабних коефіцієнтів і блоків затримки; дослідження віртуальних моделей аналогових регуляторів.
Відповіді на контрольні питання
-
Як по безперервній передавальній функції регулятора в пакет Matlab визначити передавальну функцію дискретного регулятора?
Для цього z-передавальну функцію регулятора, задану у формі фільтра, слід розв'язати щодо вихідної величини.
2. Як по дискретній передавальній функції скласти принципову схему, яка використовує масштабні підсилювачі і блоки затримки.
Z-передавальну функцію ПІД-регулятора, задану в формі фільтра, слід розв'язати щодо вихідної величини. Вирішуючи цю функцію, отримаємо рівняння, реалізація якого на масштабних підсилювачах і лініях затримки дозволяє реалізувати принципову схему.
3. Визначте перехідні характеристики аналогового ПІ регулятора.

Рисунок 9 – перехідні характеристики аналогового ПІ регулятора
4. На перехідній характеристиці аналогового ПІ-регулятора вкажіть ділянки, які визначаються пропорційною частиною (Коефіцієнт Кп) і інтегральною частиною (коефіцієнт Кі) регулятора.

Рисунок 10 – Області пропорційної частини (Коефіцієнт Кп) і інтегральною частиною (коефіцієнт Кі) регулятора
6.
Визначте z-передавальну функцію
ПІ-регулятора, якщо відомий інтервал
дискретності Іп
= 0,1с і
задана безперервна передавальна функція
ПІ-регулятора:

>> h=tf([5,50],[1,0]); %Передатна функція аналогового%ПІ-регулятора
t=0.1; %Інтервал дискретності.
hd=c2d(h,t); %Передатна функція дискретного %ПІ-регулятора
Transfer function:
5 z
-----
z – 1
7. Який вид матимуть перехідні характеристики аналогового і дискретного ПІ-регулятора, якщо в дискретному регуляторі апроксимація виконана методом прямокутників?

Рисунок 11 – Перехідні характеристики ПІ-регуляторів (1 - перехідні характеристики аналогового регулятор; 2 - перехідні характеристики дискретних регуляторів, що використовують прямокутну апроксимацію)
8. Які будуть мати перехідні характеристики аналогового і дискретного ПІ-регулятора, якщо в дискретно регуляторі апроксимація виконана методом трапецій?

Рисунок 12 – Перехідні характеристики ПІ-регуляторів (1 - перехідні характеристики аналогового регулятор; 2 – перехідні характеристики дискретного регулятора, що використовує трапецеідальную апроксимацію)
9. Визначте перехідні характеристики аналогового ПІД регулятора.

Рисунок 13 – Перехідні процеси в аналоговому ПІД-регуляторі (1)
10. На перехідній характеристиці аналогового ПІД-регулятора вкажіть ділянки, які визначаються диференціальною, пропорційною і інтегральною частинами передавальної функції.

Рисунок 14 – перехідна характеристика ПІД-регулятора
11. Зобразіть принципову схему ПІ-регулятора.

Рисунок 15 – принципова схема ПІ-регулятора
12. Зобразіть принципову схему ПІД-регулятора.

Рисунок 16 – Принципова схема ПІД-регулятора
13. За заданим коефіцієнтам Кп і Кі визначте параметри ПІ-регулятора.
ПІ-регулятор складається з паралельного з'єднання підсилювального і інтегруючого ланки, параметри яких визначаються системою управлінь.


де Кп і Ті - коефіцієнт посилення і постійної часу інтегрування регулятора.
Поставивши собі за одним параметром, наприклад ємністю, за заданими значенням Кп і Ті визначаються резистори регулятора.
14. Опишіть роботу реального ПІ-регулятора в режимі насичення і зв'яжіть фізичні процеси в реальному ПІ регуляторі.
Процеси в реальному регуляторі характеризуються двома факторами:
- Вихідна величина регулятора обмежена рівнем, визначеним елементної базою і напругою живлення;
- При досягненні вихідної величини інтегратора рівня обмеження процес інтегрування в фізичному аналогу регулятора припиняється.
У реальних схемах регулятора це досягається включенням стабілітронів в ланцюг зворотного зв'язку. При досягненні напруги при виході регулятора граничного значення відбувається пробій стабілітрона, і процес інтегрування припиняється.