

КТПСА_Лаб_1_Черкашин
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра СТ
Отчет по лабораторной работе № 1 по дисциплине: «Компьютерные технологии проектирования систем автоматики»
Выполнил: Проверил:
Ст. гр. АКТСИу-17-1 доцент каф. СТ
Черкашин В.А. Ребезюк Л.Н.
Харьков 2020
1 ОЦЕНКА КАЧЕСТВА РЕГУЛИРОВАНИЯ
1.1 Цель работы
Ознакомление с основными группами критериев качества (оценивающе точность, высокая устойчивости, быстродействие и обобщенные характеристики САР). Изучение методики использования интегральных оценок качества при исследовании ошибок систем в типовых режимах движения. Приобретение навыков оценки качества по переходной характеристике и по АЧХ замкнутой системы.
1.2 Постановка задачи.
Данная схема модели (файл ERR_AST3_1) со следующими особенностями:
- передаточная функция (ПФ) 1-го порядка объекта управления, которая изображена на рисунке 1.1;

Рисунок 1.1 - передаточная функция 1-го порядка объекта управления
-
реализован принцип управления по отклонению;
-
закон управления - последовательное соединение трех ланцив астатизма, в каждом из которых задаются параметры Ки. Закон управления изображен на рисунке 1.2.

Рисунок 1.2 - Закон управления в составе модели
Также заданный задающий сигнал g (t), схема которого изображена на рисунке 1.3.

Рисунок 1.3 - Схема сигнала g (t) в составе модели
необходимо:
- исследовать поведение модели: влияние повышения астатизма на коэффициенты ошибок.
Входными данными для варианта №10 являются:
К = 4.9, К1 = 40, К2 = 85, К3 = 70
1.3.1 Изучить сигнал задания g (t) спроектированный для введения систем в режимы обычного движения (файл err_ast3.vsm). Заполнить таблицу 1.1.
Таблица 1.1 - Параметры сигнала задания g (t)
|
1-ая составляющая |
0 ... 0,1 |
0,1 ... 0,6 |
0,6 ... 1,7 |
|
0 |
0,6 * 1 / s |
0,6 |
|
|
2-ая составляющая |
0 ... 0,1 |
0,1 ... 1 |
1 ... 1,7 |
|
0 |
0,36 * 1 / s2 |
0,36 |
|
|
3-ая составляющая |
0 ... 0,1 |
0,1 ... 1,3 |
1,3 ... 1,7 |
|
0 |
0,225 * 1 / s3 |
0,225 |
1) График задающего сигнала показывает, что сигнал имеет 3 участка:
- линейную;
- нелинейную;
- постоянную.
2) Сигнал g (t) умножается на блок «1», что приводит к тому, что сигнал симметрично отображается относительно оси времени (переворачивается в отличную область).
3) Сигнал является периодическим с периодом Т = 1,7 с.
1.3.2 Исследование поведения модели при повышении астатизма
Выполнили моделирования при нулевом астатизма, то есть при К1 = К2 = К3 = 0 Результат моделирования показано на рисунке 1.4.
Ошибка присутствует (с различным значением) на всех участках задающего сигнала.
Рассчитали контурный коэффициент по формуле:


Рисунок 1.4 - Результат моделирования при К = 4.9, К1 = К2 = К3 = 0
1.3.2.1 Первый эксперимент
Чтобы определить влияние контурного коэффициента на ошибку, повысим его с К = 4,9 до К = 9,8. Результаты моделирования показано на рисунке 1.5.

Рисунок 1.5 - Результат моделирования при К = 9.8, К1 = К2 = К3 = 0
Повышение контурного коэффициента вдвое привело к уменьшению ошибки по положению (С0) Почти вдвое, что подтверждает аналитический связь контурного коэффициента с С0. Аналитическое выражение зависимости контурного коэффициента и С0:

Вывод: Можно повысить точность (снизить ошибку по положению в К + 1 раз) путем повышения значения контурного коэффициента усиления. Однако, при повышении контурного коэффициента усиления, система может перейти в неустойчивое состояние.
Результаты вычислений ошибок С0, С1, С2, С3 с помощью ряда Тейлора и производных изображенные на рисунках 1.6 и 1.7 соответственно.

Рисунок 1.6 - Исчисление ошибок С0, С1, С2, С3 с помощью ряда Тейлора

Рисунок 1.7 - Исчисление ошибок С0, С1, С2, С3 с помощью производных
Далее скриншоты с расчётом ошибок с помощью производных не имеет смысла приводит, так как ошибки будут идентичны, расчёту с помощью ряда Тейлора.
1.3.2 Приравнивая в структурной схеме (файл err_ast3.vsm) коэффициенты усиления (KI1 & KI2 & KI3), или (KI2 & KI3) или (KI3) к нулю, можно Получить модели САР с астатизмом от нулевого до третьего порядков (Считая исходную ). Проанализировать (качественно) влияние астатизма от нулевого до третьего порядков сигнала ошибки x (t).
Исследование по астатизма 0 порядка были проведены в предыдущий пункте.
На рисунке 1.8 изображены коэффициенты усиления KI1 = 40, а (KI2 & KI3) равные нулю, а контурный коэффициент усиления равен 4.9 (согласно индивидуальному варианту), расчеты на рисунке 1.9 соответственно.

Рисунок 1.8 - показания осциллографа системы с астатизмом 1-го порядка

Рисунок 1.9 - расчеты в Mathcad
На рисунке 1.10 изображены коэффициенты усиления (KI1 = 40, KI2 = 85), а KI3 равный нулю, а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.11 соответственно.
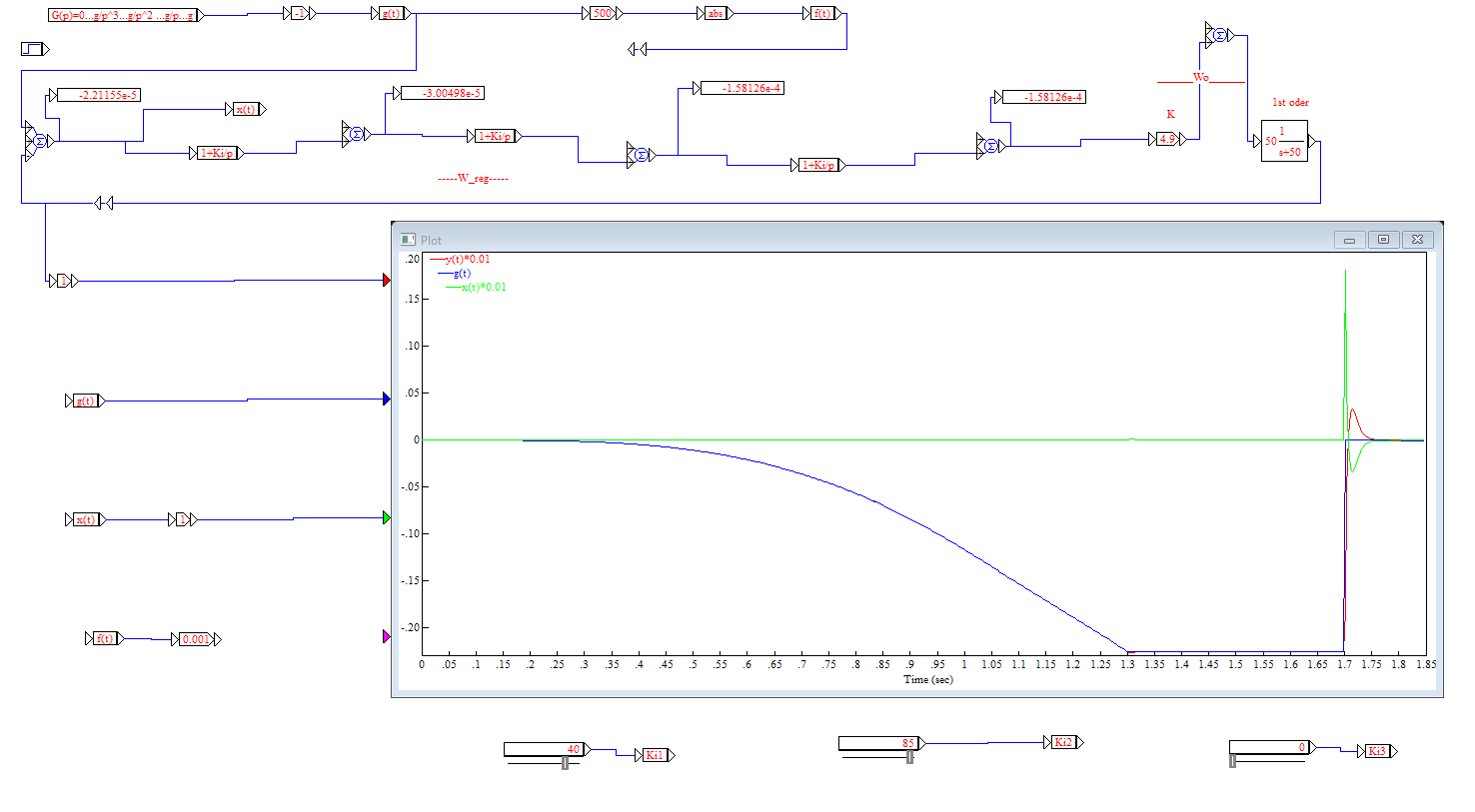
Рисунок 1.10 - показания осциллографа системы с астатизмом 2-го порядка

Рисунок 1.11 - расчеты в Mathcad
На рисунке 1.10 изображены коэффициенты усиления (KI1 = 40, KI2 = 85, KI3 = 70), а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.13 соответственно.

Рисунок 1.12 - Показания осциллографа системы с астатизмом 3-го порядка

Рисунок 1.13 - Расчеты в Mathcad
Увеличение астатизма с 0-го по 1-е порядка, показывает, что исчезли ошибки по положению, что проявилось на постоянном участке задающего воздействия. При повышению астатизма с 1-го до 2-го порядка (т.е. задействуете звено астатизма К1 = 40, 2 = 85, 3 = 0), отсутствуют ошибки, как на постоянном, так и на линейных участке.
Таблица 1.2 - Результаты вычислений коэффициентов ошибок, установленных ошибок и добротности по положению, скорости, ускорением и прироста ускорения
|
система |
С0 & K |
С1 & K |
С2 & K |
С3 & Kg '' ' |
|
Астастизм 0-го порядка К1 = 0, К2 = 0, 3 = 0 |
|
|
|
|
|
Астастизм 1-го порядка К1 = 40, К2 = 0, 3 = 0 |
0 & 4,9 |
|
|
|
 & 4,9
& 4,9 &
&

 &
&

 &
&

 &
&

 &
&

 &
&

Продолжение таблицы 1.2
|
система |
С0 & K |
С1 & K |
С2 & K |
С3 & Kg '' ' |
|
Астастизм 2-го порядка К1 = 40, К2 = 85, 3 = 0 |
0 & 4,9 |
0
&
|
|
|
|
Астастизм 3-го порядка К1 = 40, К2 = 85, 3 = 70 |
0 & 4,9 |
0
&
|
0
&
|
|

 &
&

 &
&



 &
&

1.4 Исследование модели файла (err_s ^ -1.vsm) по оптимальной настройки ПИД-регулятора
1.4.1 Постановка задачи
Дано:
-
ПФ обьэкта управления (Plant): передаточная функция 2-го порядка (см. Рис. 1.17).

Рисунок 1.14 - передаточная функция обьекта управления
-
Принцип управления: по отклонению.
-
Закон управления: ПИД-закон, схема которого изображена на рисунке 1.18.

Рисунок 1.15 - Схема ПИД-регулятора
-
Задающий сигнал: ступенчатый сигнал
-
Вариант №10: Ко = 4.9
Необходимо:
Выполнить оптимальная настройка ПИД-регулятора (дважды), изменив критерий настройки, и оценить результат настройки, определив значения параметров, характеризующих точность, быстродействие и запас устойчивости.
1.4.2 Ход работы
Результаты оптимальной настройки ПИД-регулятора по использованию различных функций цены - квадратичной интегральной оценки качества и улучшенной интегральной оценки качества изображены на рисунках 1.19 и 1.20 соответственно.

Рисунок 1.16 - Результаты оптимальной настройки ПИД-регулятора по использованию квадратичной интегральной оценки качества

Рисунок 1.17 - Результаты оптимальной настройки ПИД-регулятора по использованию улучшенной квадратичной интегральной оценки качества (сумматор подключен)
Сначала исследовали характеристики качества управления для настроенного ПОД регулятора по использованию квадратичной интегральной оценки качества.
Используя график переходной характеристики h (t), изображенный на рисунке 1.18, вычислили значение некоторых параметров (по формулам и как длины отдельных отрезков).
Вычислили значение перерегулирования по формуле:


Рисунок 1.18 - Переходная характеристика h (t) с некоторыми обозначенными параметрами
На графике ЛАЧХ (см. Рис. 1.19) обозначены следующие параметры: частота среза, полоса пропускания и резонансная частота.
По графикам ЛАЧХ и ЛФЧХ (см. Рис. 1.20) определили запас устойчивости по амплитуде и фазе.

Рисунок 1.19 - ЛАЧХ системы с обозначенной частотой среза, полосой пропускания и резонансной частотой
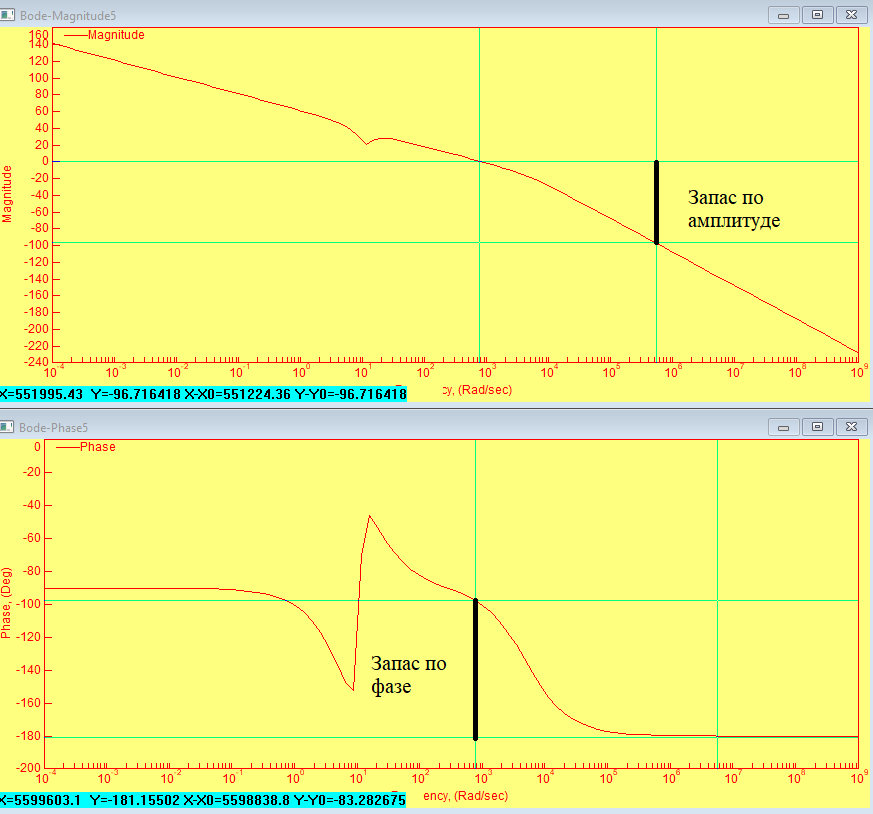
Рисунок 1.20 - ЛАЧХ и ЛФЧХ системы с обозначенными запасами по фазе и амплитуда
По значениям нулей и полюсов передаточной функции (см. Рис. 1.21) определили степень устойчивости ξ и колебательность μ системы автоматического управления по формулам:



Рисунок 1.21 - Значение нулей и полюсов передаточной функции модели
Аналогичным образом исследовали качество управления оптимально настроенного ПИД-регулятора, настроенного по улучшенной квадратичной интегральной оценке качества.
Используя график переходной характеристики h (t), изображенный на рисунке 1.18, вычислили значение некоторых параметров (по формулам и как длины отдельных отрезков).
Вычислили значение перерегулирования по формуле:


Рисунок 1.22 - Переходная характеристика h (t)
На графике ЛАЧХ (см. Рис. 1.24) обозначены следующие параметры: частота среза, полоса пропускания и резонансная частота. По графикам ЛАЧХ и ЛФЧХ (см. Рис. 1.25) определили запас устойчивости по амплитуде и фазе.

Рисунок 1.24 - ЛАЧХ системы с обозначенной частотой среза, полосой пропускания и резонансной частотой

Рисунок 1.25 - ЛАЧХ и ЛФЧХ системы с обозначенными запасами по фазе и амплитуде
По значениям нулей и полюсов передаточной функции (см. Рис. 1.26) определили степень устойчивости ξ и колебательность μ системы автоматического управления по формулам:



Рисунок 1.26 - Значение нулей и полюсов передаточной функции модели
Таблица 1.3 - Оценка качества управления по переходной характеристикой
|
Функция цены оптимальной настройки: |
Квадратичная интегральная оценка качества |
Улучшенная квадратичная интегральная оценка качества (сумматор подключен) |
|
Значения параметров оптимально настроенного ПИД-регулятора (по результатам моделирования) |
KP = 4,41518 KI = 241,288 KD = 2 |
KP = -5,59497 KI = 236,121 KD = 0,697838 |
|
Величина допустимых отклонений ,% (задается самостоятельно) |
1% |
|
|
Вычисленные значения параметров |
||
|
перерегулирование ,% |
78,329 |
|
|
продолжительность переходного процесса tП, с. |
0,031 |
0,3941 |
|
частота колебаний f, Гц |
98,02 |
2,7 |
|
количество колебаний, |
6 |
2 |
|
время запаздывания tЗ, с. |
0.0040 |
0,157 |
|
min время нарастания tНmin, с. |
0.00075 |
0,0071 |
|
max время нарастания tНmax, с. |
0.036 |
0,3072 |
|
частота среза С |
780 |
157 |
|
полоса пропускания П |
1080 |
221 |
|
резонансная частотаР |
20 |
36 |
|
Запас устойчивости по модулю (по амплитуде) |
96.71 |
139,51 |
|
Запас устойчивости по фазе |
83.89 |
89,21 |
|
Степень
устойчивости системы автоматического
управления
|
1,0759 |
|
|
Колебательность
системы автоматического управления |
|
|




ВЫВОДЫ
В ходе лабораторной работы были рассмотрены основные группы критериев качества (оценивающими точность, запас устойчивости, быстродействие и обобщенные свойства САР). А также изучены методики использования интегральных оценок качества при исследовании ошибок систем в типовых режимах движения. Были приобретены навыки оценки качества по переходной характеристике и по АЧХ замкнутой системы.
Анализ полученных результатов на основании таблицы 1.3 показал, что для схемы без подключения второй ветки на сумматоре быстродействие намного выше, чем с подключенной веткой, полоса пропускания шире, время запаздывания, нарастания ниже, однако перерегулирование значительно выше, так же как и частота колебаний, система имеет больший запас устойчивости и меньше колебательность.
Исходя из вышенаписанного можно сделать выше, что если быстродействие исходя из поставленных требований низкое, то вторая схема будет значительно лучше. То есть первая система более «быстрая», а вторая имеет больший запас устойчивости и меньшую колебательность.