

КТПСА_ЛАБ3_Черкашин
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра СТ
Отчет по лабораторной работе № 3 по дисциплине: «Компьютерные технологии проектирования систем автоматики»
Выполнил: Проверил:
Ст. гр. АКТСИу-17-1 доцент каф. СТ
Черкашин В.А. Ребезюк Л.Н.
Харьков 2020
3 КОРРЕКЦИЯ САР
3.1 Цель работы
Освоение основных методов повышения запаса устойчивости (коррекции) САР: 1) демпфирования (подавления колебаний) на высоких частотах, 2) демпфирования на средних частотах, 3) демпфирования на низких частотах. Приобретение навыков решения типовых задач коррекции схем на операционных усилителях. Ознакомление с основными видами корректирующий обратных связей: 1) гибкими ООС, 2) жесткими ООС, 3) положительными (изодромное звено на апериодических звене).
3.2 Ход выполнения лабораторной работы
3.2.1. Даны четыре системы в файлах k1.vsm, k2.vsm, k3.vsm, k4.vsm. Каждая обладает совокупностью уникальных свойств (табл. 3.1). Решить задачу идентификации моделей систем с описаниями, т.е. поставит в соответствие каждому описанию из таблицы 3.1 одну из моделей систем из указанных файлов. Решение обосновать.
Таблица 3.1 - Описания САР для идентификации
|
№ п |
Свойства САР (состоящих из минимально фазовых звеньев) |
файл |
|
1 |
ЛФЧХ разомкнутой системы чуть выше частоты среза (в пределах декады) меняет свое значение от -90 до -270 градусов. Допустимая минимально возможная потеря частотных свойств (площади ограниченной ЛАЧХ и осью частот) |
k2.vsm |
|
2 |
ЛАЧХ разомкнутой САР соответствует трехкаскадным операционного усилителя без внутренней коррекции (звено с большим коэффициентом усиления и три апериодических звена с близкими сопрягающей частотами), и пересекает вот частот с наклоном -60 дБ / дек. Допустимая существенная потеря полосы пропускания |
k1.vsm |
|
3 |
ЛФЧХ системы вплоть до частоты среза приобретает значения около -180 градусов. Для исключения условий, при которых возможно появление неустойчивости в большом, дополнительные отрицательные фазовые сдвиги НЕ допустимы |
k3.vsm |
|
4 |
Вблизи частоты среза и выше по частоте более декады наклон ЛАЧХ разомкнутой системы составляет -40 дБ / дек. Допустимая минимально возможная потеря частотных свойств |
k4.vsm |

Рисунок 3.1 - ЛАЧХ разомкнутой САР трехкаскадного операционного усилителя, которая пересекает вот частот с наклоном -60 дБ / дек (файл k1.vsm)

Рисунок 3.2 - ЛФЧХ разомкнутой системы чуть выше частоты среза (в пределах декады) меняет свое значение от -90 до -270 градусов (файл k2.vsm)

Рисунок 3.3 - ЛФЧХ системы вплоть до частоты среза приобретает значения около -180 градусов (файл k3.vsm)

Рисунок 3.4 - ЛАЧХ разомкнутой системы вблизи частоты среза и выше по частоте более декады наклон составляет -40 дБ / дек (файл k4.vsm)
3.2 Коррекция САР
Данная схема модели (файл K3.vsm):
- ПФ 1-го порядка объекта управления

Рисунок 3.5 - Передаточная функция объекта управления
- реализован принцип управления по отклонению
- Закон управления: нет.
Задан задающий сигнал 1 (t).
Необходимо: скорректировать САР одним из методов коррекции и подобрать звено для реализации выбранного метода демпфирования.
Сначала надо исследовать начальную модель и дать оценку качества управления по:
- запасом устойчивости (L (A), , ξ, μ)
- точностью (ошибка в установленном режиме);
- быстродействием (tП - время переходного процесса, ωП - частота пропускания, ωС - частота среза).

Рисунок 3.6 - Переходная характеристика исходной системы К3

Рисунок 3.7 - Переходная характеристика исходной системы К3, где видно неустойчивость системы
ЛАЧХ и ЛФЧХ исходной модели с обозначенными запасами устойчивости показано на рисунке 3.8

Рисунок 3.8 - ЛАЧХ и ЛФЧХ исходной модели с указаными запасами устойчивости
ЛАЧХ с обозначенной частотой пропускания изображена на рисунке 3.9.

Рисунок 3.9 - ЛАЧХ с обозначенной частотой пропускания
По значениями нулей и полюсов (см. рис. 3.15) определили степень устойчивости ξ и колебательность μ системы автоматического управления по формулам:



Рисунок 3.10 - Нули и полюсы замкнутой системы
Измеренные параметры оценки качества управления занесены в таблицу 3.1.
Таблица 3.1 - Значения параметров оценки качества управления
|
№ н / п |
Наименование параметра |
Значение для коррекции |
Значение после коррекции |
|
|
Запас устойчивости |
||
|
1. |
Запас по амплитуда L (A), dB |
55,21 |
101,28 |
|
180º) |
90615,814 |
1045953,1 |
|
|
2. |
Запас по фазе , Град. |
3,34 |
56,65 |
|
Частота среза (С), Рад / с. |
3244,2261 |
2536,6195 |
|
|
3. |
Частота полосы пропускания (П), Рад / с. |
4181,3678 |
3085 |
|
|
Корневые оценки |
||
|
4. |
Степень
устойчивости системы |
50 |
520 |
|
5. |
колебательность системы автоматического
управления
|
73,4778 |
|
|
|
Точность |
||
|
6. |
Ошибка в установленном режиме |
(Система в автоколебательном режиме, то есть у нее имеется установившегося режима) |
0 |
|
|
Быстродействие |
||
|
7. |
Время переходного процесса tП (Δ = ± 2%), с. |
(Система в автоколебательном режиме, поэтому невозможно определить время переходного процесса) |
0,0040 |

После исследования исходной системы, воспользуемся блоком коррекции для демпфирования частот трех разных интервалов, сконфигурирует его и оценим качество управления новой системой.
Модель К3 с подключенным блоком коррекции изображена на рисунке 3.11.

Рисунок 3.11 - Модель К3 с подключенным блоком коррекции
Сначала проведем исследования влияния отдельных звеньев блока коррекции а также их комбинаций на переходную характеристику. Схемы включения и переходные характеристики (ПХ).

Рисунок 3.12 - ПХ при демпфировании только низких частот. Автоколебания свидетельствует о неустойчивости системы
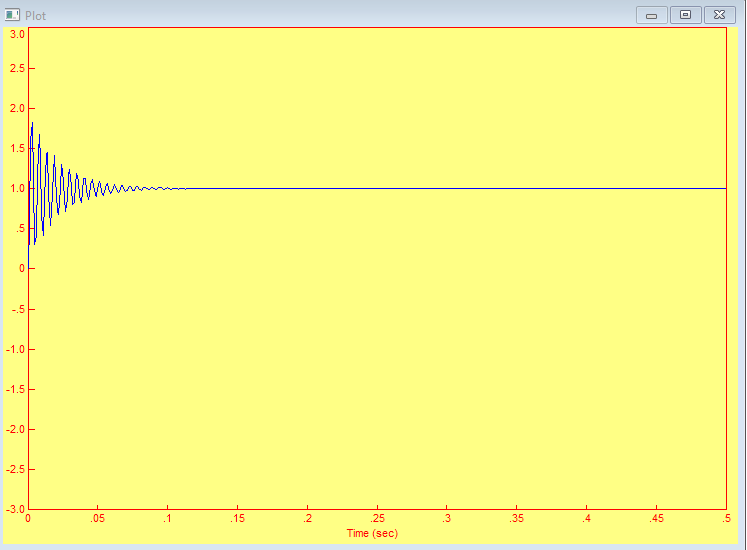
Рисунок 3.13 - ПХ при использовании только коэффициента ослабления. Система стала устойчива, однако есть колебания в начале

Рисунок 3.14 - ПХ при демпфировании только высоких частот. Все параметры значительно улучшились

Рисунок 3.15 - ПХ при демпфировании высоких частот и использовании коэффициента ослабления. Параметры еще больше улучшились

Рисунок 3.16 - ПХ при демпфировании низких частот и использовании коэффициента ослабления. Колебательность увеличилась, система не устойчива
По результатам экспериментов сделаны следующие выводы:
-
При демпфировании только высоких частот, параметры системы улучшаются. Система устойчива.
-
При демпфировании только низких частот колебательность увеличивается, система не устойичва
-
Только средних, тоже улучшаются, однако есть колебания в начале. Система устойчива.
Для коррекции САР была выбрана комбинация демпфирования высоких частот и коэффициента ослабления.

Рисунок 3.17 - Настроен блок коррекции
Переходная характеристика с обозначенным временем переходного процесса изображена на рисунке 3.18.

Рисунок 3.18 - Переходная характеристика переходного процесса
По значениям нулей и полюсов (см. Рис. 3.24) определили степень устойчивости ξ и колебательность μ САР по формулам:



Рисунок 3.19 - Нули и полюсы замкнутой системы с блоком коррекции

Рисунок 3.20 - ЛАЧХ и ЛФЧХ с определенными запасами устойчивости

Рисунок 3.28 - ЛАЧХ и ЛФЧХ метода демпфирования
ВЫВОДЫ
Во время выполнения лабораторной работы была проведена идентификация САР, усвоенные методы повышения точности САР (демпфирования частот различных диапазонов) и применены для коррекции одной из моделей, согласно варианту задания.
После удачной идентификации пяти систем, в соответствии с полученным варианта, необходимо было исследовать модель K3 и повысить качество ее управления, применив методы демпфирования низких, средних и высоких частот.
Изначально система была не устойчивая, однако использовав метод демпфирование высоких частот и использования коэффициента ослабления, получилось добиться устойчивости системы. Другие параметры значительно улучшились. Это говорит о том, что корректировка была выполнена успешно. Параметры до корректировки и после приведены в таблице 3.1.