

2- 5_Технические средства автоматизации и управления
.docФедеральное агентство образования
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
(ТУСУР)
Кафедра компьютерных систем в управлении
и проектировании (КСУП)
«технические средства автоматизации и управления»
Автор учебно-методического пособия: А.Г. Гарганеев
Томск 2007
контрольная работа №2
Вариант №5
Выполнил студент группы
« » 2008 г.
2008
-
Приведите вид механических характеристик «классического» асинхронного двигателя с беличьей клеткой.
Выражение для механической характеристики М = F(S):
. (1)
Семейство механических характеристик асинхронного двигателя, соответствующих выражению (1), при различных напряжениях питания и сопротивлениях ротора, представлено на рис. 1. Характерными точками характеристики здесь являются: Мп — пусковой момент; Sкр — критическое скольжение; Мкр — критический момент. На практике Sкр = 0,06—0,15; km = Мкр/Мп = 1,7—3,0.
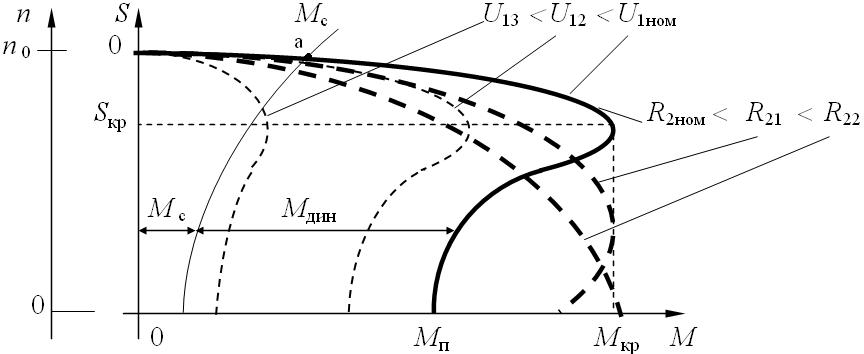
Рис. 1 — Механические характеристики АД при различных напряжениях питания и сопротивлениях ротора.
При пуске асинхронного двигателя рабочая точка начинает свое движение по естественной характеристике от места с координатами (Мп; 0) до места пересечения (а) этой характеристики с кривой момента сопротивления Мс. По мере разгона двигатель преодолевает помимо момента сопротивления Мс динамический момент Мдин = Jdрот/dt, где J — момент инерции вращающихся частей.
-
Каким звеном САР по управлению является асинхронный двигатель?
Передаточная функция асинхронного двигателя по управлению является апериодическим звеном и выглядит следующим образом:
 ,
kд
— коэффициент передачи двигателя.
,
kд
— коэффициент передачи двигателя.
-
Приведите схему однофазного выпрямителя со средней точкой при работе на LC-фильтре и активную нагрузку.

Рис. 2
-
Чем определяется стабильность выходного напряжения в компенсационном стабилизаторе?
Стабильность выходного напряжения в компенсационном стабилизаторе определяется наличием в схеме стабилитрона — диода, работающего в третьем квадранте своей вольтамперной характеристики, которая в области пробоя p-n-перехода практически параллельна оси ординат (рис. 3). Таким образом, напряжение на стабилитроне остается постоянным при изменении протекающего через него тока в пределах от Icт.min. до Icт.мах.
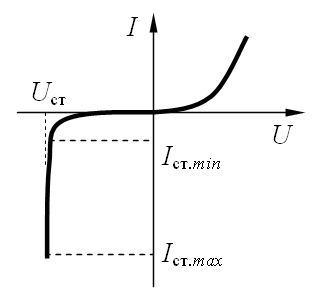
Рис. 3
-
Что такое «геркон»?
Геркон представляет собой контактные ферромагнитные пружины, помещенные в герметичные стеклянные колбы, заполненные инертным газом, азотом высокой частоты или водородом. Контактные элементы являются одновременно и элементами магнитной цепи. Под действием магнитного поля катушки ферромагнитные контактные пружины (пластины) намагничиваются, на их концах образуются разноименные магнитные полюса, вследствие чего пружины притягиваются. Герконы отличаются большой износоустойчивостью контактных пружин.
-
Каким звеном выражается передаточная функция гидродвигателя при объемном управлении?
Передаточная функция гидродвигателя при объемном управлении, так же как и асинхронного двигателя, является апериодическим звеном и выглядит следующим образом:
 ,
,
где kГД = ном /еном; ТГД = J хх / М пуск — соответственно коэффициент усиления и постоянная времени гидродвигателя.
ЗАДАЧА.
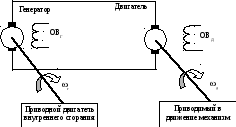
Судя по изображенной схеме и конфигурации отдельных элементов – это может быть, так называемый «гибридный» двигатель (двигатель внутреннего сгорания и электродвигатель), который применяется в современном автомобилестроении (в частности на некоторых моделях японских автомобилей). Такой двигатель служит для экономии топлива и, как следствие, уменьшения загрязнения окружающей среды (за счет отсутствия выхлопов при работе электродвигателя).
Принцип действия следующий: автомобиль начинает движение на двигателе внутреннего сгорания (механическую часть привода на колеса не рассматриваем), который начинает вращать якорь генератора постоянного тока независимого возбуждения. В свою очередь генератор вырабатывает напряжение и заряжает аккумулятор (отсутствует в схеме), затем при достижении определенных оборотов и скорости отключается двигатель внутреннего сгорания, и включается двигатель постоянного тока с якорным управлением. ДПТ имеет связь с механическим приводом вращения колес. Таким образом, автомобиль продолжает движение на электродвигателе. При снижении скорости (до определенного момента) включается обратный процесс, и движение происходит за счет двигателя внутреннего сгорания.
Ток
ДПТ при прямом подключении к сети в
начальный момент при n = 0
ограничен
лишь сопротивлением цепи якоря. Для
ограничения опасных пусковых токов и
с целью регулирования скорости вращения
в схемы ДПТ вводят регулировочные
добавочные сопротивления по цепям якоря
и возбуждения. Как следует из уравнения
скоростной
характеристики
ДПТ:
 ,
регулировать скорость можно и изменением
подводимого напряжения.
,
регулировать скорость можно и изменением
подводимого напряжения.
Включение двигателя осуществляется при добавочном сопротивлении в цепи якоря Rд2, которое ограничивает ток значением I2. При разгоне двигателя ток якоря снижается до величины I1 и происходит переключение на добавочное сопротивление Rд1, выбранное с таким расчетом, чтобы ток опять не превышал значения I2. По мере дальнейшего разгона ток опять снижается, после чего происходит прямое подключение двигателя к сети. В дальнейшем разгон происходит по естественной механической характеристике до точки «а», определяемой моментом нагрузки на валу. Таким образом, при регулировании скорости вращения двигателя независимого возбуждения с помощью добавочных сопротивлений в цепи якоря, механические характеристики увеличивают наклон («теряют жесткость») по мере возрастания значения добавочного сопротивления.
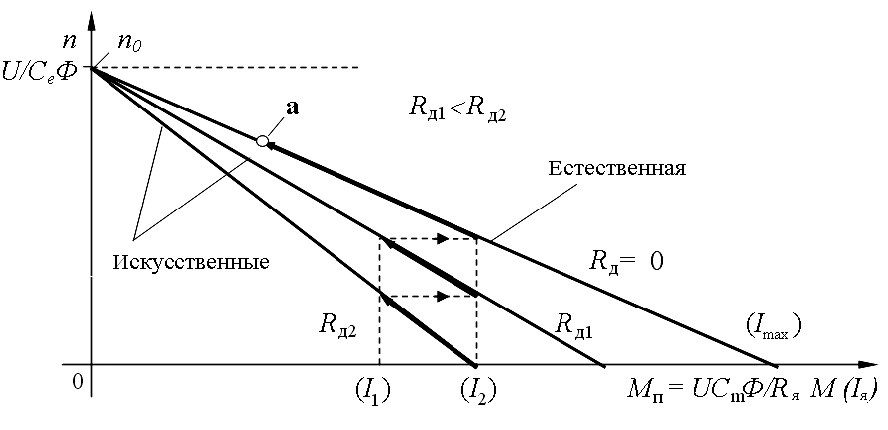
Рис. 1 — Механические характеристики ДПТ независимого возбуждения (Мп — пусковой момент, n0 — скорость холостого хода)
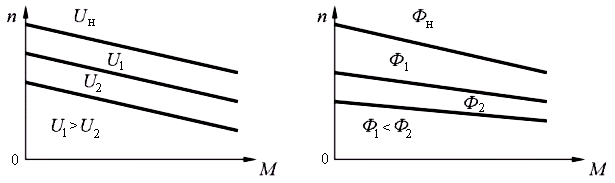
На рис. 2 и 3 представлены соответственно механические характеристики при регулировании скорости двигателя способом подводимого напряжения и регулирования потока (тока) возбуждения.
-
Рис. 2 — Механические характеристики ДПТ при регулировании напряжения.
Рис. 3 — Механические характеристики ДПТ при регулировании потока возбуждения.
Передаточная функция генератора по управлению (т.е. считая входным сигналом ток возбуждения) выразится как:
где kГ = mГ/Rв — коэффициент усиления; Тв = Lв/Rв — постоянная времени.
Считая напряжение якоря входной величиной двигателя, а скорость — выходной, получаем передаточную функцию двигателя по управлению:
 ,
,
где ТЭ = Lа /Rа; ТМ = Rа J/cecM — соответственно электрическая и механическая постоянные времени; Кдв — коэффициент усиления.
Таким образом, передаточная функция всей системы по управлению, считая входом ОВГ, выходом — скорость вращения двигателя постоянного тока при постоянстве тока ОВД:
![]() .
.