

Метрология - Лабы-1 / ТоСТЫ / Вопросы по МИИ / 80 / Э2.03-04
.docЭ2.Б - 03.
1. Тангенс угла потерь двухполюсника определяется по формуле:
а)
tg
![]() =
R*C;
=
R*C;
б)
tg
![]() =
*R*C;
=
*R*C;
в)
tg
![]() =
*L / R;
=
*L / R;
г)
tg
![]() =
*L*C;
=
*L*C;
д)
tg
![]() =
*R*L.
=
*R*L.
2. Условие баланса амплитуд в мосте переменного тока записывается в виде:
а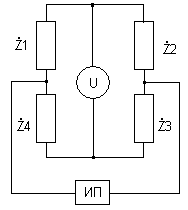 )
|
)
|![]() 1|
* |
1|
* |![]() 3|
= |
3|
= |![]() 2|
* |
2|
* |![]() 4|;
4|;
б)
|![]() 1|
* |
1|
* |![]() 4|
= |
4|
= |![]() 2|
* |
2|
* |![]() 3|;
3|;
в)
![]() 1
*
1
*
![]() 2
=
2
=
![]() 3
*
3
*
![]() 4;
4;
г)
![]() 1
+
1
+![]() 3
=
3
=
![]() 2
+
2
+
![]() 4;
4;
д)
![]() 1
+
1
+
![]() 2
=
2
=
![]() 3
+
3
+
![]() 4.
4.
3. Минимальное количество регулируемых элементов в мосте переменного тока равно:
а) 3;
б) 1;
в) 4;
г) 2;
д) 6.
4. Мосты типа МИЕ используются для измерения:
а)
С и tg
![]() ;
;
б) L и Q;
в) L и C;
г) С и Q;
д)
L и tg
![]() .
.
5. В измерителе добротности Е4 - 7 реализуется следующий метод измерения:
а) резонансный;
б) мостовой;
в) совпадений;
г) нулевой;
д) дифференциальный.
6. Искомое значение Lx в резонансных измерителях определяют, используя формулу:
а) fP = 1/(2 * LX * C0);
б) fP = 2/(LX * C0);
в) fP = 1/( LX * C0);
г)
fP =
1/
![]() ;
;
д)
fP =
1/ 2![]() ;
;
7. При использовании замещения (CX < C0 max ) искомую ёмкость находят из формулы:
а) CX = C1 ОБР / C2 ОБР ;
б) CX = C1 ОБР + C2 ОБР ;
в) CX = C1 ОБР * C2 ОБР ;
г) CX = C1 ОБР - C2 ОБР ;
д)
CX =![]() .
.
Э2.Б - 04.
1.
Между Q и tg
![]() существует следующая связь:
существует следующая связь:
а)
Q =L * tg
![]() ;
;
б)
Q =1 / tg
![]() ;
;
в)
Q =С * tg
![]() ;
;
г)
Q =L / tg
![]() ;
;
д)
Q =С / tg
![]() .
.
2. Условие баланса моста постоянного тока записывается в виде:
а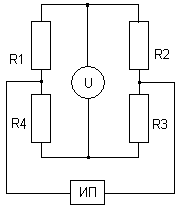 )
R1
* R2
= R3
* R4;
)
R1
* R2
= R3
* R4;
б) R1 * R4 = R2 * R3;
в) R1 / R3 = R2 / R4;
г) R1 * R3 = R2 * R4.
д) правильного ответа нет.
3. Чувствительность моста постоянного тока будет максимальна при:
а) R1 = R2 = R3 = R4;
б) R1 * R2 = R3 * R4;
в) R1 * R3 = R2 * R4;
г) R1 = R4; R2 = R3;
д) R1 = R3; R2 = R4.
4. Мосты типа МИП используются для измерения:
а) C и Q;
б) L и Q;
в) C и L;
г)
С и tg
![]() ;
;
д)
L и tg
![]() .
.
5. Чувствительность моста находится из формулы:
а)
SM
=
![]()
![]() /
/
![]() IИ;
IИ;
б)
SM
=
![]() IИ
/
IИ
/
![]() Z;
Z;
в)
SM
=
![]() IИ/
IИ/
![]()
![]() ;
;
г)SM
=
![]() IИ/
IИ/![]()
![]() *
*![]()
![]() /
/![]() Z;
Z;
д)SM
=
![]()
![]() /
/
![]() IИ*
IИ*![]() IИ/
IИ/
![]() Z.
Z.
6. Искомое значение Lx в резонансных измерителях определяют, используя формулу:
а) fP = 2 / L0 * CХ;
б) fP = 1 / L0 * CХ;
в)
fP =
1/ 2![]() ;
;
г)
fP =
1/
![]() ;
;
д) fP = 1 / 2 * L0 * CХ.
7. При использовании замещения (CX < C0 max ) искомую ёмкость находят из формулы:
а) CX = C1 ОБР - C2 ОБР ;
б)
CX =![]() ;
;
в) CX = C1 ОБР + C2 ОБР ;
г) CX = C1 ОБР * C2 ОБР ;
д) CX = C1 ОБР / C2 ОБР.
Т2.А – 07.
1. Какие измерения можно производить с помощью ММИ-2?
а) линейных размеров до 75 мм в двух координатах;
б) угловых размеров и линейных размеров до 25 мм;
в) угловые и линейные размеры деталей элементов резьб, корпусов, шаблонов в диапазонах 0 – 360о и 0 – 25 мм;
г) правильного и полного ответа нет.
2. С какой целью при измерении с помощью ММИ-2 могут проводиться многократные измерения?
а) для уменьшения систематической методической погрешности измерения;
б) для уменьшения случайной составляющей погрешности измерения;
в) для уменьшения случайной составляющей субъективной погрешности;
г) для уменьшения систематической составляющей субъективной погрешности;
д) для удобства измерений.
3. Каким из способов можно уменьшить инструментальную составляющую погрешности измерения при применении ММИ-2?
а) увеличив увеличение;
б) увеличив число наблюдений;
в) проведя многократные наблюдения;
г) используя возможность поворота предметного столика;
д) правильного ответа нет.
4. Какие измерения можно производить с помощью ОРИМ-1?
а) параметры шероховатости Ra и Rmax;
б) параметры шероховатости Ra, Ra и Rmax;
в) все параметры качества поверхности;
г) параметры шероховатости Rz и Rmax;
д) все ответы правильные.
5. С какой целью и сколько отсчетов делается при измерении с помощью ОРИМ-1 параметров шероховатости?
а) 5 и более отсчетов для повышения точности измерения;
б) все ответы правильные;
в) 3 отсчета для определния цены деления и 2 отсчета для определения параметра;
г) 1 отсчет для определния цены деления и 3 отсчета для определения параметра;
д) правильного ответа нет.
6. Как должен выбираться растр?
а) в зависимости от примененного объектива;
б) в зависимости от ожидаемого значения измеряемого параметра;
в) в зависимости от размера измеряемого объекта;
г) в зависимости от вида измеряемого параметра;
д) произвольно.
7. Принцип работы ОРИМ-1 основан на использовании:
а) явления интерференции;
б) явления дифракции;
в) оптического увеличения изображения объекта;
г) правильного ответа нет;
д) все ответы правильные.
![]()
Т2.А - 06.
1. Для чего служит микрометрическое отсчетное устройство микроскопа ММИ-2?
а) для упрщения и облегчения процедуры измерений;
б) для точного совмещения визирных линий;
в) для повышения точности измерения угловых размеров;
г) для точного отсчета угловых размеров;
д) правильного и полного ответа нет.
2. С какой целью при измерении с помощью ММИ-2 могут проводиться многократные измерения?
а) для уменьшения методической погрешности измерения;
б) для уменьшения инструментальной составляющей погрешности измерения;
в) для уменьшения субъективной составляющей погрешности;
г) для удобства измерений.
3. В каких случаях необходимо вибирать сменный объектив с максимальным увеличением?
а) в условиях недостаточной освещенности;
б) при сложной конфигурации детали;
в) при многократных наблюдениях;
г) при измерении размеров менее 50 мм;
д) правильного ответа нет.
4. Для чего в комплект ОРИМ-1 входят несколько различных объективов?
а) для получения различных увеличений изображений объектов;
б) для комплектования каждого из них с определенным растром;
в) для изменения цены деления отсчетного устройства;
г) для повышения точности измерения;
д) для изменения шага растра.
5. С какой целью и сколько отсчетов делается при измерении с помощью ОРИМ-1 параметров шероховатости?
а) 5 и более отсчетов для повышения точности измерения;
б) 2 отсчета для определения цены деления и 1 отсчет для определения параметра;
в) 3 отсчета для определения цены деления и 2 отсчета для определения параметра;
г) 1 отсчет для определения цены деления и 3 отсчета для определения параметра;
д) правильного ответа нет.
6. Цена деления ОРИМ-1 зависит от:
а) шага муаровой полосы;
б) увеличения объектива;
в) от шага и угла наклона линий растра;
г) полного ответа нет;
д) шага муаровой полосы и увеличения объектива.
7. Принцип работы ОРИМ-1 основан на использовании:
а) явления интерференции;
б) явления дифракции;
в) явлений дифракций и интерференции;
г) использование двух растров с разными наклонами штрихов;
д) правильного ответа нет.
Т2.А – 05.
-
Для чего в комплект Мми-2 включена концевая мера длины?
а) для повышения точности измерений;
б) для контроля показаний отсчетного устройства микроскопа;
в) для более точного совмещения визирных линий;
г) для расширения диапазона измерения линейных размеров до 50 мм;
д) для измерений линейных размеров в диапазоне 20 – 75 мм;
-
С какой целью при измерении с помощью ММИ-2 могут проводиться многократные
измерения?
а) для уменьшения систематической методической погрешности измерения;
б) для уменьшения инструментальной составляющей погрешности измерения;
в) для уменьшения случайной составляющей субъективной погрешности;
г) для удобства измерений.
3. Каим из способов можно уменьшить инструментальную составляющую погрешности измерения при применении ММИ-2?
а) увеличив увеличение;
б) увеличив число наблюдений;
в) проведя многократные наблюдения;
г) используя возможность поворота предметного столика;
д) правильного ответа нет.
4. Для чего предназначен растровый микроскоп ОРИМ-1?
а) для измерения малых линейных размеров;
б) для измерения параметров волнистости поверхности;
в) для измерения параметров шероховатости поверхности и высот отдельных неровностей;
г) для измерения отклонений формы деталей;
д) все ответы правильные.
5. Повышение точности определения высоты неровности с помощью ОРИМ-1 достигается:
а) применение растра с максимальным шагом;
б) применяя максимальное увеличение;
в) применяя растр с большим наклоном линий;
г) увеличивая освещенность объекта при измерении;
д) правильного ответа нет.
6. Как должен выбираться растр?
а) в зависимости от примененного объектива;
б) в зависимости от ожидаемого значения измеряемого параметра;
в) в зависимости от вида измеряемого параметра;
г) произвольно;
д) правильного ответа нет.
7. Принцип работы ММИ-2 основывается на:
а) использовании увеличенного изображения объекта измерений;
б) использовании оптического и механического рычагов;
в) явлении автоколлимации;
г) микрометрического отсчетного устройства;
д) правильного ответа нет.
Т1.Б – 05.
1. Предельные размеры:
а) устанавливают допустимую неточность изготовления деталей и требуемый характер их соединения;
б) устанавливаются в результате измерения с погрешностью, не превышающей допустимую;
в) получаются мз кинематических, динамических, и прочностных расчетов;
г) выбираются из конструктивных, технологических или других требований;
д) определяются величиной получающихся между деталями зазорами и натягами.
2. Допуск Т для любого квалитета находится из формулы (в формулах а – число единиц допуска; i – единица допуска; D – номинальный размер):
а) Т = D * i;
б) Т = D / i;
в)
Т = 0,45 *
![]() + 0,001 * D;
+ 0,001 * D;
г) Т = а * i;
д) Т = а / i.
3. Допустимая погрешность измерения линейного размера:
а) не должна превышать допуск на измеряемый размер;
б) не должна превышать (1/3 – 1/5) допуска на измеряемый размер;
в) должна быть равна допуску на измеряемый размер;
г) не должна превышать 1/2 допуска на измеряемый размер;
д) не должна превышать 2/3 допуска на измеряемый размер.
4. Выпускаемые промышленностью штангенциркули имеют цену деления нониуса:
а) 1 мм и 0,5 мм;
б) 0,5 мм и 0,2 мм;
в) 0,2 мм и 0,1 мм;
г) 0,1 мм и 0, 05 мм;
д) 0, 05 мм и 0, 01 мм.
5. Практически для всех микрометрических инструментов шаг винте составляет:
а) 1 мм;
б) 5 мм;
в) 0,1 мм;
г) 0,2 мм;
д) 0,5 мм.
6. Пружинные головки имеют цену деления:
а) от 0,0001 мм до 0,01 мм;
б) 0,01 мм;
в) от 0, 001 мм до 0,01 мм;
г) 0,05 мм и 0,1 мм;
д) 0,01 мм и 0,05 мм.
7. Угломеры:
а) реализуют один из двух косвенных методов измерения угла: посредством измерения двух катетов прямоугольного треугольника или посредством измерения одного катета и гипотенузы прямоугольного треугольника;
б) выпускаются в виде наборов и применяются для точных измерений, поверки и установки угловых приборов и инструментов;
в) представляют собой угловые меры, воспроизводящие угол 90 град.;
г) предназначен для массового допускового контроля;
д) представляет собой устройство, содержащее две шарнирно соединенные друг с другом линейки.
Т1.Б – 04.
1. Номинальные размеры:
а) устанавливают допустимую неточность изготовления деталей;
б) устанавливают требуемый характер соединения деталей;
в) устанавливаются в результате измерения с погрешностью, не превышающую допустимую;
г) полусаются из кинематических, динамических и прочностных расчетов или выбираются из конструктивных, технологических или других требований;
д) определяются величиной получающихся между деталями зазорами или натягами.
2. Число единиц допуска а зависит от:
а) предельного отклонения;
б) номинального размера;
в) действительного отклонения;
г) действительного размера;
д) квалитета точности изготовления детали.
3. Допустимая погрешность измерения линейного размера:
а) не должна превышать (1/3 – 1/5) допуска на измеряемый размер;
б) не должна превышать допуск на измеряемый размер;
в) должна быть равна допуску на измеряемый размер;
г) не должна превышать 1/2 допуска на измеряемый размер;
д) не должна превышать 2/3 допуска на измеряемый размер.
4. В штангенциркуле с ценой деления растянутого нониуса 0,05 мм:
а) основная шкала имеет 10 мм, шкала нониуса разбита 9 равных частей;
б) основная шкала имеет 39 мм, шкала нониуса разбита 20 равных частей;
в) основная шкала имеет 19 мм, шкала нониуса разбита 20 равных частей;
г) основная шкала имеет 20 мм, шкала нониуса разбита 39 равных частей;
д) основная шкала имеет 39 мм, шкала нониуса разбита 10 равных частей;
5. Из-за суммирования погрешностей шагов винта микрометрических инструментов:
а) цена деления шкалы барабана не может быть получена лучше 0,01 мм;
б) берется шаг винта равным 0,5 мм;
в) полная длина перемещения микрометрического винта ограничивается 25 мм;
г) число делений на барабане берется равным 50;
д) используются специальные установочные меры.
6. Рычажно-зубчатые индикаторы выпускаются с ценой деления:
а) 0,1 мм и 0,05 мм;
б) 0,05 мм и 0,01 мм;
в) 0,01 мм;
г) 0,01 мм, 0,002 мм и 0,001 мм;
д) 0,0001 мм.
7. Конические калибры и шаблоны:
а) реализуют один из двух косвенных методов измерения угла: посредством измерения двух катетов прямоугольного треугольника или посредством измерения одного катета и гипотенузы прямоугольного треугольника;
б) выпускаются в виде наборов и применяются для точных измерений, поверки и установки угловых приборов и инструментов;
в) представляют собой угловые меры, воспроизводящие угол 90 град.;
г) предназначены для массового допускового контроля;
д) представляют собой устройства, содержащие две шарнирно соединенные друг с другом линейки.
Р6.Б – 15.
1. Фазо-частотная характеристика ЧП - это
а) зависимость фазы сигнала на выходе ЧП от частоты;
б) зависимость фазы сигнала на входе ЧП от частоты;
в) зависимость вносимого ЧП фазового сдвига от частоты;
г) зависимость вносимого ЧП фазового сдвига от амплитудывходного сигнала;
д) зависимость фазы сигнала ГКЧ от частоты.
2. Чем обеспечивается линейный частотный масштаб панорамы?
а) выходным сигналом ЧП;
б) фазой на выходе ЧП;
в) сигналом ГКЧ;
г) входным напряжением ЧП;
д) сигналом ГЛИН;
3. С какой целью используется цифровой частотомер в измерителе Х3-12?
а) измерение частоты выходного сигнала ГКЧ;
б) измерение частоты входного сигнала ГКЧ;
в) создание частотной оси панорамы;
г) управление перестройкой частоты ГКЧ;
д) обеспечение одинаковой яркости частотных меток.
-
Синхронизация перестройки частот гетеродина и ГКЧосуществляется с помощью
а) установочного фазовращателя;
б) аттенюатора;
в) амплитудного детектора;
г) системы фазовой автоподстройки частоты;
д) фазового детектора.
5. Отсчет частоты в измерителе Ч3-12 производится с помощью
а) системы фазовой автоподстройки частоты;
б) цифрового частотомера;
в) индикатора блока фазы;
г) индикатора ИП1;
д) все ответы правильные.
6. С помощью фазового детектора производится
а) калибровка измерителя по фазе;
б) преобразование фазового сдвига ЧП в пропорциональное ему напряжение;
в) преобразование ослабления ЧП в пропорциональное ему напряжение;
г) синхронизация перестройки частоты гетеродина и ГКЧ;
д) калибровка измерителя по амплитуде.
-
Какой сигнал является опорным сигналом фазового детектора?
а) сигнал ГЛИН;
б) сигнал ГКЧ;
в) сигнал, формируемый в блоке частотных меток;
г) сигнал кварцевого генератора;
д) правильного ответа нет.
E4.Б – 05
1. Канал X предназначен для:
а) подсветки луча при прямом ходе и гашения луча при обратном ходе;
б) неискаженной передачи и усиления исследуемого сигнала;
в) формирования напряжения развертки;
г) модуляции луча по яркости;
д) установки требумых значений коэффициентов вертикального отклонения
(КB) и развертки (КP) перед измерениями.
-
При исследовании синусоидальных сигналов рекомендуется в условии синхронизации брать:
а) n = 2 или n = 3;
б) n = 1;
в) n = 0,5;
г) n =2,5;
д) n = 0,1;
-
При открытом режиме входа в канал Y поступает:
а) постоянная и переменная составляющие сигнала;
б) только переменная составляющая сигнала;
в) импульсный сигнал с малой скважностью;
г) только постоянная составляющая сигнала;
д) импульсный сигнал с большой скважностью.
4. Ждущая развертка характеризуется тем , что:
а) генератор развертки работает в непрерывном режиме, независимо от наличия сигнала запуска;
б) генератор развертки запускается с определенной задержкой после запускающего сигнала;
в) создается она одним генератором развертки и предназначена для задержки запуска развертки, создаваемой другим генератором развертки;
г)
генератор развертки запускается только
при наличии сигнала запуска;![]()
д) сигнал отображается одним и тем же лучом с различным коэффициентом развертки.
5. Автоколебательная развертка используется для:
а) исследования только низкочастотных сигналов;
б) исследования только высокочастотных сигналов;
в) детального исследования сигнала, задержанного относительно импульса запуска;
г) исследования импульсных сигналов с большой скважностью;
д) исследования периодических сигналов ( в том числе и импульсных с малой скважностью).
6. При передаче на вход Y осциллографа синусоидального сигнала образцового
измерительного генератора частотой Fy = 3 кГц и на вход Х синусоидального сигнала
частотой Fx получена интерференционная картина вида тогда:
а) Fx = 3 кГц;
б) Fx = 1 кГц;
в) Fx = 6 кГц;
г) Fx = 9 кГц;
д) Fx = 2 кГц;
7.
При измерении фазового сдвига
![]() х
с помощью метода наложения используется
формула
х
с помощью метода наложения используется
формула
( в ответах аб – количество делений по оси Х , соответствующих фазовому сдвигу; ав –
количество делений по оси Х , соответствующих периоду сигналов ) :
а) х = arcsin (аб / ав);
б) х = arcsin (ав / аб);
в) х = 360 * аб / ав;
г) х = arctg (аб / ав);
д) х = 360 * ав / аб.
Е3.Б - 06.
1. Структурная схема электронного аналогового вольтметра переменного тока может содержать (в ответах ВУ - выходное устройство; УПТ - усилитель постоянного тока; УПерТ - усилитель переменного тока; Д - детектор; ИМ - магнитоэлектрический измерительный механизм):
а) ВУ - УПТ - ИМ;
б) ВУ - Д - УПТ - ИМ;
в) ВУ - УПерТ - ИМ;
г) ВУ - Д - ИМ;
д) ВУ - УПТ - Д - УПерТ - ИМ.
2. Схема электронного аналогового вольтметра переменного тока с детектором на выходе в сравнении со схемой с детектором на входе:
а) обладает более высокой чувствительностью;
б) требует дополнительной операции "установка нуля";
в) имеет более широкий частотный диапазон;
г) имеет температурный дрейф "нуля" усилителя постоянного тока;
д) имеет временной дрейф "нуля" усилителя постоянного тока.
3. Коэффициент формы напряжения КФ находится из формулы (в ответах Um - пиковое значение напряжения; Ucк - среднеквадратическое значение напряжения; Ucв - средневыпрямленное значение напряжения):
а) КФ = Uск / Um;
б) КФ = Um / Uск;
в) КФ = Um / Uсв;
г) КФ = Uск / Uсв;
д) КФ = Uсв / Uск.
4. Для обеспечения минимальной методической погрешности измерения переменного напряжения необходимо, чтобы (в ответах Rv - входное сопротивление вольтметра; Cv - входная емкость вольтметра):
а) Rv - велико; Cv - велико;
б) Rv - мало; Cv - велико;
в) Rv - мало; Cv - мало;
г) Rv - велико; Cv - мало;
д) Rv = Cv.
5.
Относительную инструментальную
погрешность
![]() U
(в %) повторяемого вольтметра можно найти
из формулы (в ответах Uv - показание
поверяемого вольтметра; U0 -
показание образцового вольтметра; UПР
- предел измерения напряжения):
U
(в %) повторяемого вольтметра можно найти
из формулы (в ответах Uv - показание
поверяемого вольтметра; U0 -
показание образцового вольтметра; UПР
- предел измерения напряжения):
а)
![]() U
= (UV + U0) * 100% / U0;
U
= (UV + U0) * 100% / U0;
б)
![]() U
= (UV - U0) * 100% / U0;
U
= (UV - U0) * 100% / U0;
в)
![]() U
= (UПР - UV) * 100% / UПР;
U
= (UПР - UV) * 100% / UПР;
г)
![]() U
= (UПР - U0) * 100% / UV;
U
= (UПР - U0) * 100% / UV;
д)
![]() U
= (UV - U0) / UПР.
U
= (UV - U0) / UПР.
-
Если класс точности вольтметра обозначается 1,0 , то:
а)
шкала вольтметра практически равномерна
и приведенная погрешность вольтметра
|![]() U|
U|![]() 1,0%;
1,0%;
б)
шкала вольтметра практически равномерна
и абсолютная погрешность вольтметра
|![]() U|
U|![]() 1,0%;
1,0%;
в)
шкала вольтметра существенно неравномерна
и абсолютная погрешность вольтметра
|![]() U|
U|![]() 1,0%;
1,0%;
г)
относительная погрешность вольтметра
|![]() U|
U|![]() 1,0%;
1,0%;
д)
шкала вольтметра существенно неравномерна
и приведенная погрешность вольтметра
|![]() U|
U|![]() 1,0%.
1,0%.
7. Цифровые вольтметры постоянного тока, реализующие частотно-импульсный метод преобразования:
а) измеряют только мгновенные значения напряжения;
б) бывают только неинтегрирующими;
в) бывают неинтегрирующими и интегрирующими;
г) измеряют мгновенное и усредненное значение напряжения;
д) бывают только интегрирующими.
Е3.Б - 07.
1. Структурная схема электронного аналогового вольтметра постоянного тока может содержать (в ответах ВУ - выходное устройство; УПТ - усилитель постоянного тока; УПерТ - усилитель переменного тока; Д - детектор; ИМ - магнитоэлектрический измерительный механизм):