

zadachi
.docx1.Что
необходимо изменить в программе, чтобы
выполнял работу один мотор «В»?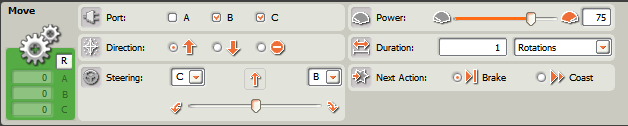
2. Что следует
сделать, для бесконечного выполнения
одного и того же действия мотором?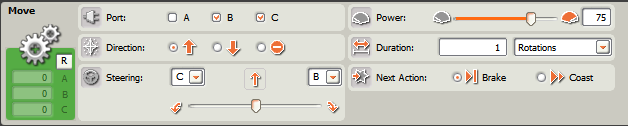
3. Сколько оборотов мотора потребуется, для передвижения робота на 15 см зная, что за один полный оборот колеса, робот проходит 7 см?
 4.
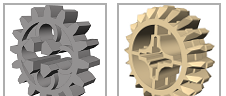
Рассчитайте передаточное отношение:
4.
Рассчитайте передаточное отношение:
 Ведомая имеет 40 зубцов, ведущая 8.
Ведомая имеет 40 зубцов, ведущая 8.
5. Рассчитайте передаточное отношение:

 Ведомая
имеет 24 зубца, ведущая 8.
Ведомая
имеет 24 зубца, ведущая 8.
6. Рассчитайте передаточное отношение:

 Ведомая имеет 32 зубца, ведущая 24.
Ведомая имеет 32 зубца, ведущая 24.
7. Рассчитайте передаточное отношение:

 Ведомая
имеет 20 зубцов, ведущая 16.
Ведомая
имеет 20 зубцов, ведущая 16.
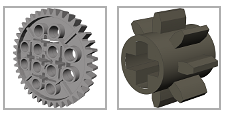
8. Как выглядит ультрозвуковой датчик?
1. 2.
2.
 3.
3.
 4.
4.

9.Что делает
робот, после столкновения с предметом?

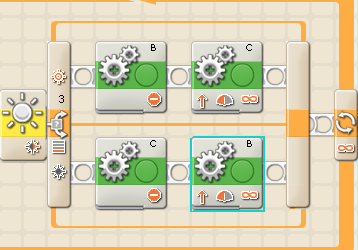
10. Какой
датчик управляет данным циклом?

11. Какую
операцию совершает данный блок?
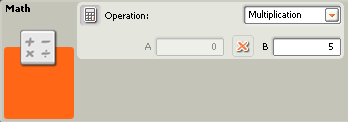
.

 13.
Какое минимальное количество блоков,
может потребоваться для движения робота
по следующей траектории? (начало движения
отмечено точкой)
13.
Какое минимальное количество блоков,
может потребоваться для движения робота
по следующей траектории? (начало движения
отмечено точкой)
14. Почему
робот, при выполнении программы, повернул
не в нужном направлении?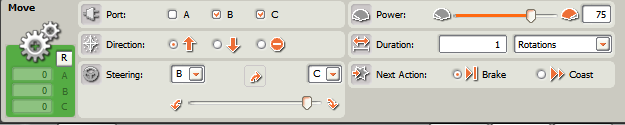
15. Что
следует изменить в схеме движения, чтобы
робот двигался по красной линии?
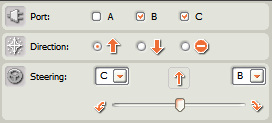
16. Укажите, в каком варианте робот движется прямо:
1.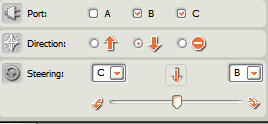 2.
2.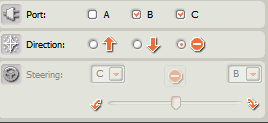 3.
3.
17. Сколько
времени будет двигаться робот?
18. С высокой
или низкой скоростью будет вращаться
мотор?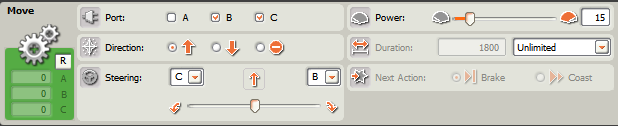
19. Что
произойдет с движением робота в данной
ситуации?
20. На какую
из кнопок следует нажать, чтобы программа
с копировалась в «мозг» робота?
ОТВЕТЫ: 1- убрать галочку с «С» 2 – вместо «rotation» выбрать «unlimited» 3 – приблизительно 2,14 оборота 4 – 40/8=5 5 – 24/8=3 6 – 32/24=1,5 7 – 20/16=1,25 8 – 1 9 – после столкновение робот двигается вперед до того момента, пока цветовой датчик на засечет черный цвет. 10 - ультразвуковой 11 - умножение 12 – в 5 раз 13 – 11 блоков 14 - вероятно, что провода, отвечающие за вращение колес, перепутаны, то есть нужно поменять местами «В» и «С», или изменить направление поворота вручную через программу. 15 - нужно вместо светового датчика выбрать цветной и настроить оттенок движения на красный цвет. 16 – 3. 17 - 5 секунд. 18 – низкой, так как сила вращения установлена на 15 единиц. 19 – робот будет двигаться по круговой траектории. 20 - кнопка 1.