

EP / Ильинский Н. Ф. - Основы электропривода
.pdf111
а) б)
Рис. 5.11. Система ПН-ДПТ и ее механические характеристики
Роль преобразователя П в схеме на рис. 5.11, как отмечалось, может играть генератор (система Г-Д) или тиристорный преобразователь (ТП-Д). Фактор, вызывающий переходный процесс в этих системах, - изменение входного сигнала uвх, приводящее к изменению ЭДС преобразователя еп.
а) б)
Рис. 5.12. Система ПЧ-АД и ее механические характеристики
Роль преобразователя П в схеме на рис. 5.12 играет статический преобразователь частоты. Фактор, вызывающий переходный процесс в этих системах, - изменение входного сигнала uвх, приводящее к изменению частоты и напряжения на выходе преобразователя.
Как и прежде, целью изучения переходных процессов в системе П-Д будет определение зависимостей ω(t), М(t) и иногда i(t) при известных условиях переходного процесса и параметрах привода.
Введем ряд условий и допущений.
1. Механические характеристики привода ω(М) известны, линейны (по крайней мере, на рабочих участках) и параллельны друг другу, то есть выражаются уравнением (5.4):
|
|
|
|
ω = ω 0 − |
М |
, |
|
|
|
|
|
|
β |
||
|
|
|
|
|
|
|
|
где β = |
dM |
= |
M |
- жесткость характеристик. |
|||
dω |
ω |
||||||
2. Известны или могут быть определены зависимости еп(t) или f1(t), то есть за-
112
кон изменения во времени фактора, вызывающего переходный процесс. Так как еп или f1 однозначно связаны со скоростью идеального холостого хода привода ω0
ω 0 |
= |
еп |
|
- для схемы на рис. 5.11, |
|
с |
|
||||
|
|
|
|
|
|
ω 0 |
= |
2π f1 |
- для схемы на рис. 5.12, |
||
|
|||||
|
|
|
p |
|
|
то известен закон изменения во времени ω0.
3.Известно начальное (ωнач, Мнач) и конечное (ωкон, Мкон) состояние привода, момент инерции J и момент сопротивления Мс = const.
4.Преобразователь П обладает двусторонней проводимостью, то есть характе-
ристики ω(М) могут располагаться во всех квадрантах плоскости ω, М.
Рассмотрим прежде всего качественные отличия переходных процессов в системе П-Д от изученных ранее случаев, когда еп или f1 изменялись мгновенно, то есть мгновенно устанавливалась соответствующая новая механическая характеристика, а изменение скорости ω и момента М в переходном процессе происходило согласно именно этой характеристике. Переходный процесс определялся статической механической характеристикой привода.
В рассматриваемых далее задачах еп или f1 изменяются, как указывалось, не мгновенно, то есть переход привода с одной характеристики на другую происходит постепенно, одновременно с изменением скорости, в результате чего соответствие между скоростью ω и моментом М в каждый момент времени определяется не статической механической характеристикой, а другой, отличной от нее характеристикой, которую мы далее будем называть динамической механической характеристикой или просто динамической характеристикой.
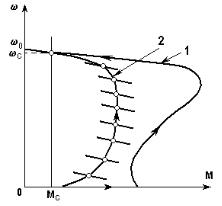
В качестве примера на рис. 5.13 показана статическая характеристика асинхронного двигателя при номинальной частоте 1, по которой будет происходить пуск при мгновенном приложении к двигателю напряжения такой частоты, и динамическая характеристика 2, соответствующая пуску двигателя путем плавного изменения частоты от нуля до номинальной по некоторому закону.
113
Рис. 5.13. Статическая 1 и динамическая 2 механические характеристики
Динамические характеристики определяются темпом изменения фактора, вызывающего переходный процесс, и параметрами привода, могут очень сильно отличаться от статических характеристик и даже иметь совсем другую форму.
Легко обнаружить связь зависимостей ω(t) и М(t) с динамической характеристикой привода: исключив время t из уравнений ω(t) и М(t), мы получим динамическую характеристику.
а) Уравнения, описывающие переходные процессы.
Из уравнения механической характеристики (5.4) получим:
М = ½β½ω0 − ½β½ω. |
(5.5,а) |
Подставив (5.5,а) в уравнение движения (5.1), после элементарных преобразований будем иметь:
w + |
|
|
J |
|
|
dw |
= w |
0 - |
|
|
|
M c |
= w c . |
(5.13) |
||||
|
|
b |
|
|
dt |
|
|
|
|
b |
|
|||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Коэффициент при производной |
|
|
J |
|
|
, как и раньше, - электромеханическая по- |
||||||||||||
|
|
b |
|
|
||||||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стоянная времени Тм. Правая часть уравнения представляет собою скорость ωс, соответствующую моменту сопротивления Мс, однако, в рассматриваемом случае ω0 , а значит и ωс не постоянные величины, а известные функции времени ω0(t) и ωc(t). Таким образом, уравнение (5.13) имеет вид:

114
ω + T м |
dω |
= ω c( t) . |
(5.14) |
|
dt |
||||
|
|
|
Решение этого дифференциального уравнения определит искомую зависимость
ω(t).
Для получения зависимости М(t) удобно воспользоваться непосредственно уравнением движения (5.1), подставив в него производную найденной функции ω(t):
М = М с + J dω ( t) . (5.15) dt
Правая часть уравнения (5.14), вообще говоря, может иметь любой вид. Закон ω0(t) в случае безынерционного преобразователя формируется на его входе; при инерционном преобразователе закон ω0(t) связан со свойствами преобразователя. В ряде случаев закон ω0(t) формируется таким образом, чтобы получить требуемый закон ω(t).
б) Уравнение переходных процессов при линейном законе ωс(t)
Получим решение уравнения (5.14) для одного важного вида функции ωс(t) -
для линейного изменения ωс во времени: |
|
ωс(t) = а + kt. |
(5.16) |
Такой закон может быть сформирован при безынерционном преобразователе с помощью задатчика интенсивности.
Мы используем здесь общее уравнение прямой, не накладывая пока никаких ограничений на величины а и k с тем, чтобы, рассматривая частные случаи, можно
было пользоваться полученным общим результатом. |
|
||
Уравнение (5.14) с учетом (5.16) имеем вид: |
|
||
ω + Т м |
dω |
= a+ kt. |
(5.17) |
|
|||
|
dt |
|
|
Решение будем искать, как и прежде, в виде суммы свободной ωсв и принужден- |
|||
ной ωпр составляющих: |
|
||
ω = ωсв + ωпр . |
(*) |
||

115
Свободная составляющая, то есть решение однородного уравнения, полученного из (5.17) имеет вид:
−t
ωсв = Ае Т м .
Принужденную составляющую будем искать, учитывая (5.16), в виде: ωпр = В + kt,
так как в установившемся режиме скорость будет линейно изменяться во времени. Подставив ωпр в (5.17) получим:
В + kt + kTм = a + kt
или
B = a - kT м. Подставим теперь ωсв иωпр в (*):
−t
ω= Ае Т м + a− kT м + kt.
Постоянную А найдем, используя начальные условия: при t = 0 ω = ωнач: ωнач = А + а - kTм,
откуда
А = ωнач - а + kTм
Окончательно будем иметь:
ω = ( ω на÷ − а + kT м )е− |
t |
|
Т м + a − kT м + kt . |
(5.18) |
Перейдем теперь к рассмотрению некоторых конкретных переходных процессов в системе П-Д.
в) Пуск вхолостую.
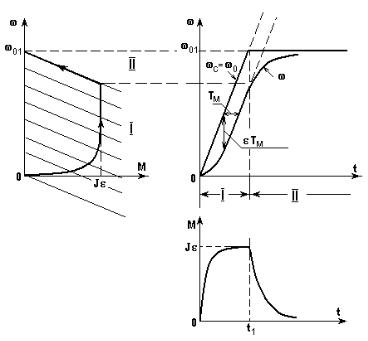
Будем полагать, что закон изменения во времени фактора, вызывающего переходный процесс, еп или f1 или в общем случае ω0 имеет вид, представленный на рис. 5.14 справа вверху. Так как Мс = 0 (пуск вхолостую), то ωс = (t) будет совпадать с ω0(t) - см. уравнение (5.13), т.е. а = 0 и
116
k = |
ω 01 |
= ε , |
|
||
|
t1 |
|
где ε - ускорение, характеризующее темп изменения ω0;
при 0 < t < t1 |
ωс(t) = εt; |
при t > t1 |
ωс(t) =ω01 = сonst. |
Излом функции ωс(t) при t = t1 свидетельствует о том что переходный процесс состоит из двух этапов, и его необходимо рассчитать отдельно для каждого участка.
I этап (0 < t < t1). |
|
|
|
|
|
|
|
|
Приняв, что при t = 0 ωнач = |
0 и подставив в (5.18) а = 0, k = ε, получим |
|||||||
− |
t |
|
− |
t |
|
(5.19) |
||
Т |
|
− ε Т м + |
T |
м ) . |
||||
ω = ε Т ме |
|
м |
ε t = ε t − ε T м( 1 − е |
|
|
|||
Рис. 5.14. Механические характеристики и графики переходного процесса при пуске вхолостую с ω0(t) = εt
Воспользовавшись уравнением (5.15), найдем закон изменения момента во времени:
− |
t |
|
(5.20) |
|
T |
м ) . |
|||
М = Jε ( 1 − e |
|
|
||
Проанализируем полученные уравнения. Ускорение привода определится как
|
|
|
|
|
|
|
|
|
|
|
|
117 |
|||
|
|
|
|
|
|
|
|
|
|
dw |
|
= e( 1- e− |
t |
||
|
|
|
|
|
|
|
|
|
|
Tм |
) |
||||
|
|
|
|
|
|
|
|
|
|
dt |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и при |
t = 0 |
dω |
|
|
t = 0 = 0. |
Этот результат очевиден: при t = 0 ωс = ω0 = 0 т.е. еп = |
|||||||||
|
|
||||||||||||||
|
|
|
|||||||||||||
dt |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||
0 или |
f1 = 0, привод не развивает момента и в соответствии с уравнением движения |
||||||||||||||
(5.1) |
J |
dω |
= 0 |
и |
|
dω |
= 0 . |
|
|
|
|
||||
|
|
dt |
|
|
|
|
|||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
||||
При t > 3Тм |
|
dω |
|
t > 3Tм |
» e , т.е. скорость изменяется в том же темпе, что и фак- |
||||||||||
|
|
||||||||||||||
|
dt |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
тор, вызывающий переходный процесс. Из уравнения (5.19) следует, что при t > 3Тм
ω = e(t - Тм) = ωс(t) - eТм . |
|
(5.19,а) |
||||||||||||||||
Графики ωс(t) и ω(t) представлены на рис. 5.14. Кривая ω(t) сдвинута вправо |
||||||||||||||||||
относительно кривой ωс(t) |
на величину Тм; в каждый момент времени при t > 3Тм |
|||||||||||||||||
разница между ωс и ω составляет |
eТм. |
|
|
|
|
|
|
|
|
|||||||||
Момент в соответствии с (5.20) возрастает по экспоненциальному закону (см. |
||||||||||||||||||
рис. 5.14) и при t > 3Тм достигает величины |
|
|
|
|||||||||||||||
Mмакс = Je. |
|
|
|
|
|
|
|
|
|
|
(5.20,а) |
|||||||
Это соотношение позволяет оценить допустимую величину e. Действительно, |
||||||||||||||||||
если считать, что в переходном процессе Ммакс = Мдоп, то |
||||||||||||||||||
e доп |
= |
М доп |
. |
|
|
|
|
|
|
|
|
|
||||||
|
|
J |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В частности, можно найти минимальное время пуска привода при котором мо- |
||||||||||||||||||
мент не превысит допустимого значения: |
|
|
|
|||||||||||||||
t |
= |
|
|
ω 01 |
|
= Jω 01 . |
|
|
|
|||||||||
1м ин |
|
|
e доп |
|
|
М доп |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||
Если положить, что Мдоп = 2 Мн, а |
|
b |
|
= |
20М |
н |
, что справедливо для нормаль- |
|||||||||||
|
|
|||||||||||||||||
|
|
w 01 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ной электрической машины средней мощности, то получим |
||||||||||||||||||
t1м ин = |
|
|
J |
|
|
× 10 = |
10Т м . |
|
|
|
||||||||
|
|
b |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

118
II этап (t > t1).
На II этапе ωс =ω01 , а значит, и еп или f1 имеют постоянную величину. Переходный процесс в этом случае ничем не отличается от рассмотренных ранее переходных процессов, отнесенных к первой группе задач. Если отсчитывать время от t1, (точка 0’), то скорость ω и момент М будут изменяться в соответствии с уравнением (5.10); в качестве хнач следует принять значения ω и М в момент времени t1. Если t1< 3Тм, начальные значения должны быть лпределены по (5.19) и (5.20) при подстановке в эти уравнения t = t1.
В качестве хкон, очевидно, следует взять ω01 и 0.
Графики ω(t) и M(t) на II этапе показаны на рис. 5.14. Там же слева приведена динамическая механическая характеристка для случая пуска вхолостую.
Все рассмотренные выше величины и зависимости имеют очевидный физический смысл для системы П-Д с двигателем постоянного тока. Действительно,
ω 0( t) = |
еп( t) |
; |
ω ( t) = |
e( t) |
, |
|
c |
c |
|||||
|
|
|
|
т.е. кривая ω0(t) представляет собою в некотором масштабе закон изменения во времени еп, а кривая ω(t) - закон изменения е в том же масштабе. Разность этих величин в соответствии с вторым законом Кирхгофа определит ток, протекающий в якорной цепи:
i( t) = eп( t) − e( t) , RΣ
а значит, и момент, развиваемый двигателем
M(t) = ci(t).
г) Реверс (торможение) вхолостую.
Для осуществления реверса ω0 должна изменить направление. Это значит, что еп уменьшается до 0, затем изменяет полярность и возрастает до заданной величины, либо f1 уменьшается до 0, меняется чередование фаз и f1 возрастает до заданной величины.
119
Как и прежде, будем считать, что изменение ω0 во времени осуществляется по линейному закону при (0 < t < t1), затем при t > t1 ω0 = ω01. Таким образом, переходный процесс состоит из двух участков, которые следует рассматривать отдельно.
Так как переходный процесс осуществляется вхолостую (Мс = 0), то ωс(t) = ω0(t). |
|
|||||||||||||||||||||||
I этап (0 < t < t1). |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
На I этапе изменение ωс(t) можно представить уравнением (5.16), подставив |
в |
|||||||||||||||||||||||
него а = ω01, k = -ε. Тогда, воспользовавшись уравнением |
(5.18), в котором ωнач |
= |
||||||||||||||||||||||
ω01, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
t |
|
|
|
||||||
|
|
|
|
|
|
Т м + ω 01 + ε Т м − ε t |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
ω = − ε Т м е |
|
|
|||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
ω = ω 01 − ε t + ε T м( 1 − е− |
|
t |
(5.21) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
Tм |
) . |
|
|||||||||||||
Уравнение (5.16) определяет закон изменения М во времени: |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dω |
|
− Jε( 1 − e− |
t |
|
|
||||||
|
|
|
|
|
|
|
|
|
М = J |
= |
Tм |
) . |
(5.22) |
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
Проанализируем полученные уравнения. |
|
|
||||||||||||||||||||||
Ускорение привода |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
dω |
= − ε( 1 − e− |
t |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
Tм |
) . |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||
При t = 0 |
|
dω |
|
|
|
t= 0 = 0, что очевидно и с физической точки зрения: при t = 0 |
||||||||||||||||||
|
|
|
||||||||||||||||||||||
|
dt |
|
|
|
||||||||||||||||||||
|
|
|||||||||||||||||||||||
М = 0 т.е. J |
dω |
= |
0 и |
|
|
|
dω |
= 0 . |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
dt |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
При t > 3Тм |
|
dω |
|
t> 3Tм ≈ − ε , т.е. как и при пуске, скорость изменяется в том же |
||||||||||||||||||||
|
|
|||||||||||||||||||||||
|
dt |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
темпе, что и фактор, вызвавший переходный процесс. При t > 3Тм ω = ω01 - ε(t - Тм) = ωс(t) + εТм ,
т.е. как и при пуске, кривая ω(t) располагается правее кривой ωс(t) , причем сдвиг по оси t составляет величину Тм, а в каждый момент времени при t > 3Тм разница

120
между ωс и ω составляет εТм.
Момент отрицателен и изменяется по экспоненциальному закону до величины
Mмакс = - Jε.
II этап (t > t1).
Переходные процессы на II этапе подчиняются уравнению (5.10) и рассчитывается очевидным образом.
Кривые ωс(t), ω(t) и М(t) и динамическая характеристика показаны на рис. 5.15.
Рис. 5.15. Механические характеристики и графики переходного процесса при реверсе вхолостую с ω0(t) = -εt
При торможении вхолостую ω0 изменяется от значения ω01 до нуля. Как и при реверсе, процесс состоит из двух этапов, причем на I этапе (0 < t < t1 ) кривые ω(t) и М(t) не отличаются от аналогичных кривых при реверсе, а на II этапе - подчиняются уравнению (5.10) с соответствующими хнач и хкон.
Кривые ω(t) и М(t), а также динамическая характеристика показана на рис.
5.16.