

А27820 Данин В.Б. Техника измерений хол установок и пищевых производств
.pdfПримером звена I порядка может служить холодильная камера с воздухоохладителями, в которой возмущающим воздействием является хранимый груз, а выходным – температура воздуха камеры при неизменной холодопроизводительности холодильной машины.
Апериодическое звено II порядка. Такое звено описывается диф-
ференциальным уравнением вида
Т |
2 d 2Y |
Т |
dY |
Y kx, |
(2.18) |
||
|
|
|
|
||||
2 dt |
|
|
|||||
|
2 |
1 |
dt |
|
|
||
где Т1 и Т2 – коэффициенты, которые в совокупности характеризуют инерционность звена и время запаздывания между единичным воздействием Х и реакцией Y на это воздействие при необходимом
условии Т1  2Т2.
2Т2.
В операторной форме
Т 2 |
Р Y (P) |
T pY ( p) Y ( p) kx ( p). |
(2.18а) |
2 |
2 |
1 |
|
Передаточная функция имеет вид
W (P) |
Y (P) |
|
|
k |
. |
(2.19) |
|
|
|
|
|||
X (P) |
|
T22 P2 |
T1P 1 |
|||
|
|
|
|
График переходной характеристики показан на рис. 2.7.
Рис. 2.7. График переходной характеристики
21
Переходная характеристика (см. рис. 2.7)
h (t) C e λ1t |
C |
2 |
e λ2t , |
(2.19а) |
1 |
|
|
|
|
где λ1,2 – корни характеристического уравнения |
Т22 Р2 + T1P + 1 = 0, |
|||
а C1 и С2 – постоянные интегрирования, значения которых зависят от начальных условий Y0.
Примером звена II порядка может служить изменение температуры воздуха в центре холодильной камеры при «тихой» системе охлаждения (за счет свободной конвекции).
2.3.3. Колебательные звенья
Если корни характеристического уравнения для звена II порядка комплексные, что может быть при условии Т1 < 2Т2, то апериодическое звено вырождается в колебательное звено с передаточной функцией
W (P) |
Y (P) |
|
|
k |
, |
(2.20) |
|
|
|
|
|
|
|||
X (P) |
|
T 2 P2 |
2ξTP 1 |
||||
|
|
|
|
||||
где ξ = T1 , 0 ≤ ≤ 1 – коэффициент затухания; 2T2
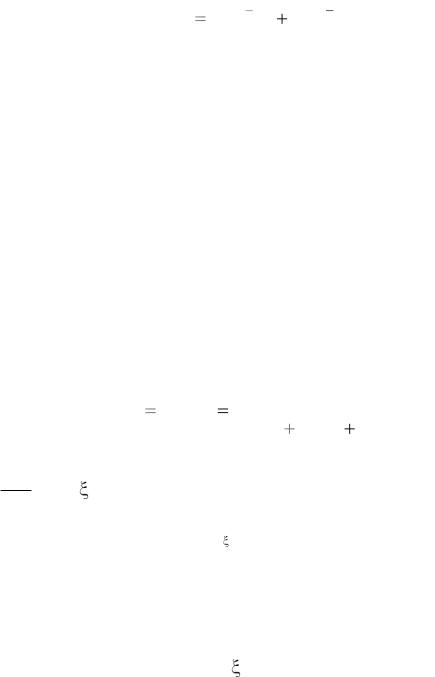
h(t) = – Ae– t sin (ωt + φ),
здесь  и ω – вещественная и мнимая части корней характеристического уравнения:
и ω – вещественная и мнимая части корней характеристического уравнения:
λ1, 2 = ± jω,
причем  характеризует затухание в колебательной системе, а ω – частоту колебаний.
характеризует затухание в колебательной системе, а ω – частоту колебаний.
На рис. 2.8 дан график переходной характеристики для колебательного звена. Примером такого звена может служить перемещение поршня компрессора при выключении электропривода.
22
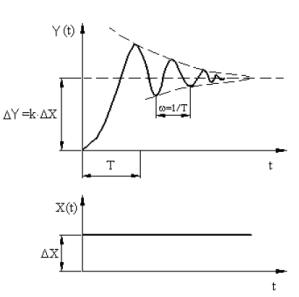
Рис. 2.8. График переходной характеристики для колебательного звена
2.3.4. Астатические (интегрирующие) звенья
Астатические звенья – это звенья без самовыравнивания, т. е. при сколь угодно малом управляющем или возмущающем воздействии на входе выходной параметр теоретически стремится к бесконечности. Примером может служить емкость постоянного поперечного сечения, заполняемая жидкостью или сыпучим материалом, если в качестве входного параметра выбрать приток, а выходного – уровень. Дифференциальное уравнение для таких звеньев запишется в виде
dy/dt = kx;
в операторной форме –
PY (p) = kX (p),
где k – коэффициент передачи интегратора. Передаточная функция
W(P) = Y(p) / X(p) = k/p = 1/Тр, |
(2.21) |
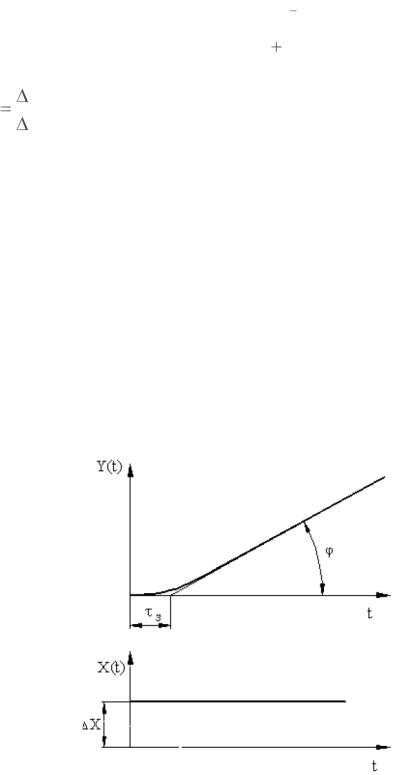
где Т = 1/k – постоянная времени интегрирования, которая определяет угол наклона линейной функции относительно оси времени,
т. е. φ = arctg 1/T;
Y(t) = (1/Т)t.
23
На рис. 2.9 показана переходная характеристика интегрирующего звена; график переходной характеристики Y(t) – на рис. 2.10.
Рис. 2.9. Переходная характеристика |
Рис. 2.10. График переходной |
интегрирующего звена |
характеристики |
2.3.5. Звено транспортного запаздывания
Примером звена транспортного запаздывания может служить перемещение изделия на транспортере (транспортный конвейер), протекание жидкости или газа по длине трубопровода.
Уравнение такого звена имеет вид
Y (t + τ3) = kX; |
(2.22) |
передаточная функция
W(P) = Y(p) / X(p) = e 3P , |
(2.23) |
где τ3 – время запаздывания выходного параметра Y(t) относительно входного параметра Х(t).
24
2.4. Основные правила соединения динамических звеньев
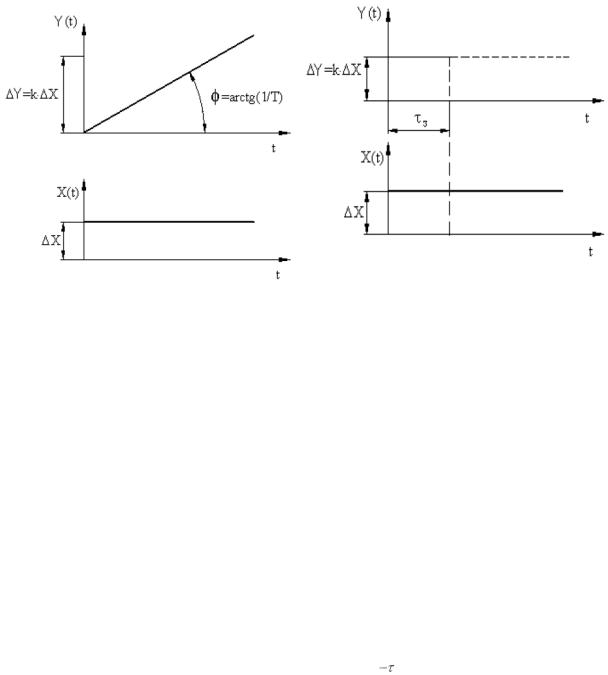
2.4.1. Последовательное соединение звеньев
Передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев (рис. 2.11):
Y (Р) = W1 (P) W2 (P) … Wn (P) = Пnj 1 Wj (P). |
(2.24) |
Рис. 2.11. Последовательное соединение звеньев
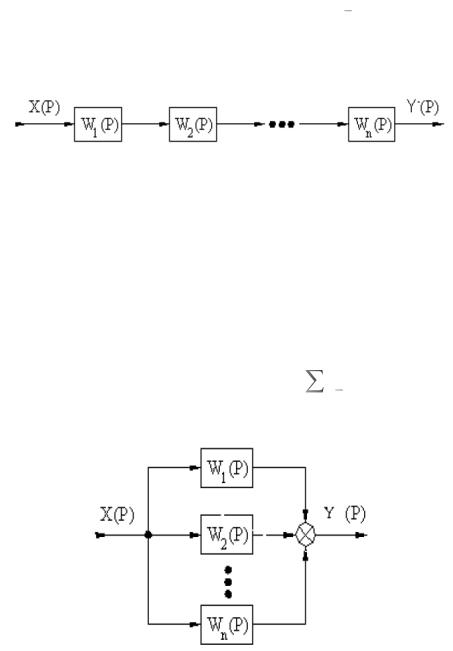
2.4.2. Параллельное соединение звеньев
Передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (рис. 2.12):
Y(Р) = W1 (P) + W2 (P) + … + Wn (P) = |
n |
1 Wj |
P . |
(2.25) |
j |
Рис. 2.12. Параллельное соединение звеньев
25
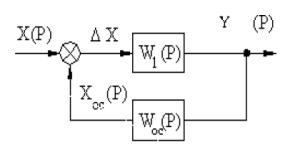
2.4.3. Встречно-параллельное включение звеньев
Это звенья или системы с положительной либо отрицательной обратной связью (рис. 2.13):
W(P) = W1(P) / 1 ± Woc(P) W1(P). |
(2.26) |
Рис. 2.13. Встречно-параллельное включение звеньев
Знак «+» соответствует положительной обратной связи, а знак «–» – отрицательной обратной связи. Если полярность или фаза сигналов Х(р) и Хос(р) совпадают, то это соответствует положительной обратной связи. При противоположных значениях полярности либо фазы этих сигналов имеет место отрицательная обратная связь. Примером отрицательной обратной связи может быть включение дополнительного компрессора или увеличение холодопроизводительности винтового компрессора при увеличении температуры воздуха холодильной камеры. При положительной обратной связи, по ошибке оператора либо из-за неисправности системы регулирования, при повышении температуры воздуха камеры уменьшается холодопроизводительность компрессора.
2.5.Математические модели объектов управления
иметоды их получения
Автоматизация любого объекта предполагает решение основных и вспомогательных задач. Например, для холодильной установки основной задачей автоматизации является поддержание температуры рабочей среды в заданных пределах при известных изменениях
26

внешних возмущений. К вспомогательным задачам следует отнести защиту от опасных режимов работы установки, питание испарителей, стабилизацию температуры конденсации и т. д. В любом случае при автоматизации необходимо знать математическую модель объекта управления, которая может быть получена аналитическим или экспериментальным путем [5].
Аналитический способ получения модели объекта пригоден при условии хороших знаний физических процессов, протекающих в объекте управления, но в любом случае этот способ дает приближенную модель, так как она не может отразить все малые параметры, свойственные этому объекту. Примером аналитического метода получения модели может служить тепловой объект, который был рассмотрен в подразд. 2.1–2.4.
Экспериментальный метод получения модели объекта может быть пассивным и активным. При пассивном методе не нужно формировать искусственные возмущения, а надо использовать реальные текущие режимы работы установки. Например, загрузка холодильной камеры теплым грузом при неизменной холодопроизводительности установки приведет к повышению температуры воздуха камеры, измеряя которую в нескольких точках во времени и усредняя полученные значения, можно получить разгонную (переходную) характеристику изменения температуры во времени. Обработав полученную характеристику на ЭВМ или вручную, получим передаточную функцию объекта.
При активном эксперименте на объекте специально формируют возмущающие воздействия, а затем, как и при пассивном эксперименте, получают разгонную характеристику во времени, которая подлежит дальнейшей обработке.
Все объекты по своим динамическим свойствам делятся на статические (объекты с самовыравниванием) и астатические (объекты без самовыравнивания). При единичном возмущении на статическом объекте его выходной параметр стремится к новому установившемуся значению. Таким свойством обладают все тепловые объекты, у которых экспериментальная переходная характеристика обычно имеет вид как на рис. 2.7 при единичном воздействии ∆Х(t). Полученную характеристику можно аппроксимировать произведением двух передаточных функций – звена с запаздыванием 3 и экспонентой I порядка с постоянной времени T0:
27
|
|
|
Y (P) |
|
k0 e |
τ3 P |
|
|
|
|
|
W (P) = |
= |
|
, |
(2.27) |
|||
|
|
X (P) |
1 T0 P |
||||||
где k0 |
Y |
– коэффициент передачи объекта, а T0 – |
постоянная |
||||||
|
|||||||||
X |
|||||||||
|
|
|
|
|
|
|
|
||
времени объекта, которая характеризует его инерционность.
Для определения величин τ3 и T0 следует к точке перегиба переходной характеристики провести касательную до пересечения с установившимся значением Yуст.
При единичном возмущении на астатическом объекте его выходной параметр стремится к бесконечности независимо от величин возмущающего воздействия. Классическим примером может служить изменение уровня жидкости в емкости постоянного сечения по высоте при сколь угодно малом притоке жидкости в этот сосуд. Типовая переходная характеристика реального астатического объекта имеет вид, показанный на рис. 2.14.
Рис. 2.14. Типовая переходная характеристика реального астатического объекта
28
Полученную характеристику можно аппроксимировать произведением двух передаточных функций – звена с запаздыванием τ3 и идеального интегрирующего звена:
W (P) = |
Y (P) |
= |
1 |
e τ3 P , |
(2.28) |
|
X (P) |
T0 P |
|||||
|
|
|
|
где 1/Т – коэффициент передачи интегратора, определяющий угол наклона характеристики относительно оси времени φ = arctg (1/Т).
Для определения τ3 следует продолжить линейный участок переходной характеристики до пересечения с осью времени.
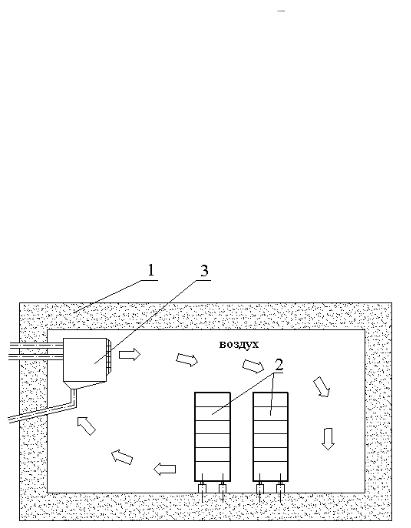
Пример аналитического способа получения математической модели холодильной камеры хранения продукта с принудительной системой охлаждения рассмотрен на рис. 2.15.
Рис. 2.15. Модель холодильной камеры хранения продукта с принудительной системой охлаждения:
1 – ограждение камеры; 2 – хранимый груз; 3 – воздухоохладитель
При составлении модели считаем холодопроизводительность воздухоохладителя постоянной и учитываем только теплопритоки от ограждения Qогр и хранимого груза Qгр. Тогда за элементарное время Δτ температура воздуха камеры изменится за счет теплопритоков на величину tк.
29
Уравнение теплового баланса имеет вид |
|
Vв ρв cв tк = (Qогр + Qгр) Δτ, |
(2.29) |
где Vв, ρв, cв – объем воздуха камеры, его плотность и удельная теплоемкость, соответственно.
Раскроем правую часть уравнения (2.29):
|
Qогр = |
огр Fогр (tогр – tк); |
|
|
||
|
|
|
|
|
|
(2.30) |
|
|
Qгр = |
гр Fгр (tгр – tк). |
|
|
|
Подставив выражения (2.30) в (2.29), получим в прираще- |
||||||
ниях ∆tгр |
и ∆tогр: |
|
|
|
|
|
Vв ρв cв |
tк = (( F)огр ∆tогр + ( |
F)гр ∆tгр – ( |
F)огр ∆tк – ( F)гр ∆tк)) Δτ, |
|||
или при Δτ → 0 получим |
|
|
|
|
||
|
Vвρвcв (d |
tк/dτ) + (( F)огр + ( |
F)гр) |
tк = |
|
|
|
= ( F)огр |
tогр + ( F)гр |
tгр. |
|
(2.31) |
|
Поделим левую и правую части уравнения (2.31) на ( |
F)огр + |
|||||
+ ( F)гр: |
|
|
|
|
|
|
|
Т (d |
tк/dτ) + ∆tк = k1 tогр + k2 |
tгр, |
(2.32) |
||
где Т – постоянная времени воздуха холодильной камеры, имеющая размерность времени и характеризующая ее инерционность,
Т = |
Vв ρв св |
; |
(α F)огр (α F)гр |
k1 – коэффициент, учитывающий степень влияния изменения температуры внутренней поверхности ограждения на температуру воздуха камеры,
k1 = |
(α F )огр |
; |
||
(α F ) |
огр |
(α F )гр |
||
|
|
|
|
|
|
|
30 |
|
|