

Практические задания (Васильев) / ПЗ№4
.docxМОДЕЛИРОВАНИЕ СИСТЕМЫ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ С ПОМОЩЬЮ TAB ПРЕОБРАЗОВАТЕЛЯ. (https://ieeexplore.ieee.org/document/8447655)
Топология TAB преобразователя.
Топология TAB преобразователя состоит из трех активных ячеек H-моста, которые соединены через трехобмоточный трансформатор, как видно из рисунка 1. В преобразователе TAB, fsw представляет частоту переключения, а индуктивности Le1, Le2 и Le3 - это внешние катушки индуктивности, подключенные к контуру переменного тока в каждом порте. Каждая форма волны напряжения на контуре переменного тока имеет прямоугольную форму, а коэффициент заполнения установлен на 50%. Первичный, вторичный и третичный контуры TAB преобразователя могут быть подключены к источнику постоянного напряжения, а мощность, передаваемая между тремя контурами через трансформатор, может быть достигнута только управлением фазовым сдвигом.
Предполагается, что каждое постоянное напряжение является константой - то же самое, что и распределение постоянного тока. (я не понял, как это перевести, иначе не получилось) Разность фазового сдвига стробирующих сигналов между первичной и вторичной сторонами представлена как δ2 [рад], в то время как сигнал между первичным и третичным контуром представлен как δ3 [рад], как показано на рисунке 2.
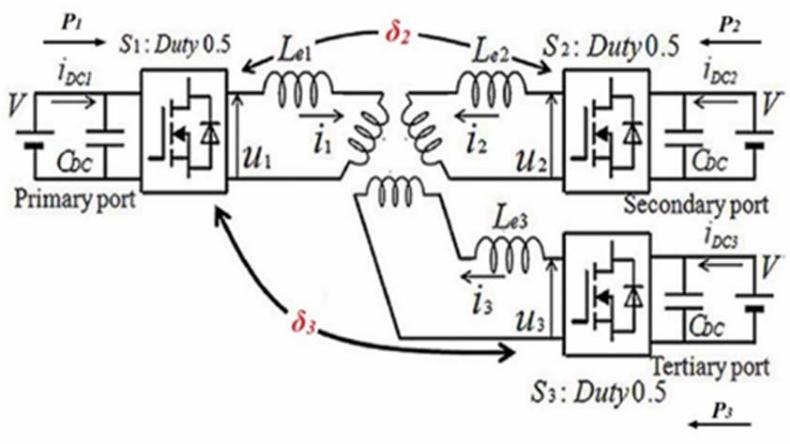
рис. 1 – топология ТАВ преобразователя
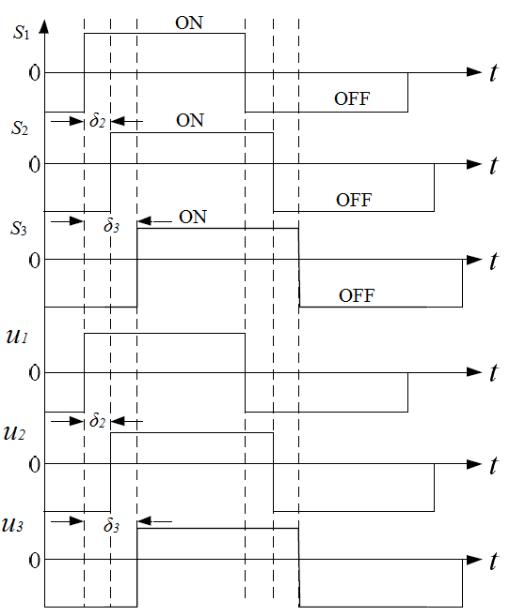
Рис 2 – Фазные осциллограммы ТАВ преобразователя
Остальная информация в документе номер 1.
Улучшенное распределение мощности постоянного тока в системах с несколькими входами и одним управлением с использованием повышающего преобразователя.
(https://www.researchgate.net/publication/282939817_Improved_DC_power_distribution_with_multi-input_single-control_systems_using_boost_converter )
Топология с несколькими входами и одним управлением (MISC)
Общая топология получена от повышающего преобразователя, как показано на рис. 3. Существует главный источник S1, этот источник может быть источником напряжения или тока, а подчиненные источники S2 - Sn соединены с потреблением (тока) управляющего переключателя через специальные катушки индуктивности. Топология преобразователя упоминается как управление с несколькими входами и одним управлением из-за того, что главный источник всегда контролирует работу [4]. Главный источник S1 фиксирует рабочий цикл переключателя MI на основе рабочей точки MPP входного источника, если входом является солнечная панель. В этом случае ток используется для питания нагрузок, подключенных к этой шине. В случае источника напряжения можно контролировать выходной ток усиления (output current of the boost). Нагрузки подключаются к шине постоянного тока напрямую. Поскольку топология преобразователя основана на повышающем преобразователе, выходное напряжение всегда превышает входное напряжение для работы преобразователя.
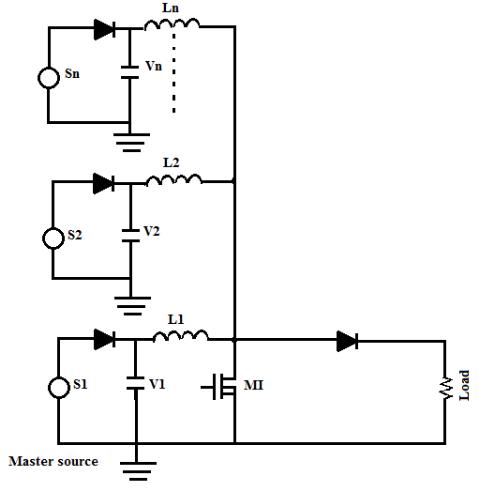
Рис 3 - Повышающий преобразователь с несколькими входами.
В зависимости от характеристик источников, подключенных к преобразователю, его можно классифицировать как источник напряжения или источника тока.
Важно отметить, что все распространенные возобновляемые источники являются однонаправленными по своей природе и должны сопрягаться с диодом. Когда источник тока подключен к преобразователю, на входной клемме используется конденсатор, как видно из рис. 3. Этот конденсатор требуется для удовлетворения требований к пульсации входного тока преобразователя. Когда источник имеет свойство источника напряжения, избегают использования входного конденсатора, поскольку он неизменно заставляет напряжение конденсатора становиться равным напряжению на выводах главного источника из-за ограничения продолжительности включения.
Режимы работы
Различные режимы работы преобразователя MISC показаны в таблице 1. Все режимы действительны, если удовлетворяется основное ограничение выходного напряжения, превышающего входное. Обратите внимание, что выход преобразователя подключен к шине постоянного тока. Резистивная нагрузка представляет собой нагрузку на шину постоянного тока. Все описанные ниже рабочие режимы очень сильно зависят от конструкции входного индуктора. Эта философия дизайна будет рассмотрена в следующем разделе. (Режимы будут в самом документе, они достаточно объемные).
Результаты экспериментов
Экспериментальный прототип и оборудование разработаны для проверки работы MISC от режима I до режима IV, как показано на рисунках 12 и 13 соответственно. В качестве основного источника используется солнечная панель. MPPT реализован с помощью цифрового контроллера. Второй источник напряжения или полная ячейка используются в качестве подчиненного источника в зависимости от тестируемого режима работы. Используется основная солнечная панель с номиналом 34WNoc = 2 1V и Isc = 2.IA. Алгоритм возмущения и наблюдения реализован на микроконтроллере PIC во время тестирования. Главный источник - это солнечная панель, работающая в режиме MPP, обеспечивающая напряжение на клеммах VI = 14 В в рабочей точке MPP, а используемый источник постоянного тока имеет напряжение на клеммах V2 = 10 В. Как объяснено в разделе V в разделе «Работа в режиме I», ток через ведомый источник работает в режиме прерывистого тока. Режим прерывистого тока подчиненного источника обеспечивает более высокие требования к усилению, когда два источника напряжения связаны с преобразователем MISC. Ток IL1 проходит через катушку индуктивности ведущего источника.

Рис 4. – Модель MISC
Стратегия управления распределенной энергосистемой постоянного тока с использованием возобновляемых источников энергии.
(https://www.sciencedirect.com/science/article/abs/pii/S096014811000251X )
3. Конфигурация системы управления распределением постоянного тока.
3.1. Система управления преобразователями мощности
Системы управления преобразователем мощности показаны на рис. 5 и 6. Преобразователь на стороне генератора обеспечивает работу с переменной скоростью за счет управления скоростью вращения PMSG. С другой стороны, сетевой инвертор подает электроэнергию, и его частота синхронизируется с частотой энергосистемы. Каждый из преобразователей мощности представляет собой стандартный трехфазный двухуровневый блок, состоит из шести IGBT и управляется по закону треугольной волны ШИМ. Кроме того, система распределения постоянного тока включает в себя аккумулятор, чтобы избежать перенапряжения на шине постоянного тока при неисправности линии. Системы управления описаны ниже.
3.2. Преобразователь на стороне генератора
Преобразователь
на стороне генератора регулирует
скорость вращения PMSG для достижения
работы с переменной скоростью с помощью
управления MPPT. Используется векторная
схема управления, показанная на рис. 5.
Управление скоростью PMSG реализуется
на вращающейся раме, где ошибка скорости
вращения используется в качестве
входного сигнала регулятора скорости,
который выдает команду тока статора i
по оси .
Обычно считается, что синхронная машина
с цилиндрическими полюсами управляет
током статора по оси d, и i1d устанавливается
равным нулю. Поэтому в этой статье
команда
.
Обычно считается, что синхронная машина
с цилиндрическими полюсами управляет
током статора по оси d, и i1d устанавливается
равным нулю. Поэтому в этой статье
команда
 тока статора оси d установлена равной
нулю. Ошибки между командами тока оси
dq,
и
,
и фактическими токами оси dq используются
в качестве входов контроллеров тока.
Выходы контроллера тока вырабатывают
команды напряжения оси dq
тока статора оси d установлена равной
нулю. Ошибки между командами тока оси
dq,
и
,
и фактическими токами оси dq используются
в качестве входов контроллеров тока.
Выходы контроллера тока вырабатывают
команды напряжения оси dq
 и
и
 после
развязки. Положение ротора
после
развязки. Положение ротора
 используется
для преобразования переменных abc в dq и
рассчитывается на основе скорости
вращения PMSG.
используется
для преобразования переменных abc в dq и
рассчитывается на основе скорости
вращения PMSG.
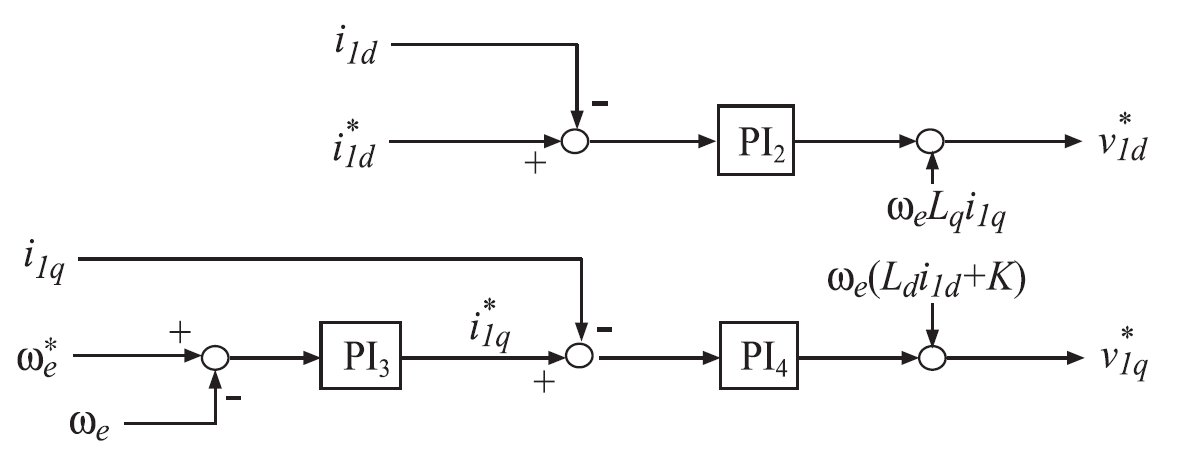
Рис 5 - Система управления преобразователем на стороне ветрогенератора.
3.3. Сетевой инвертор
Сетевой
инвертор предназначен для постоянного
контроля напряжения на шине постоянного
тока
 и работы с единичным коэффициентом
мощности. Система управления инвертором
на стороне сети показана на рис. 6. Ток
по оси d может управлять напряжением
шины постоянного тока
,
а ток по оси q может управлять реактивной
мощностью
и работы с единичным коэффициентом
мощности. Система управления инвертором
на стороне сети показана на рис. 6. Ток
по оси d может управлять напряжением
шины постоянного тока
,
а ток по оси q может управлять реактивной
мощностью .
Опорное напряжение шины постоянного
тока
.
Опорное напряжение шины постоянного
тока
 устанавливается на 3500 В, в то время как
команда
устанавливается на 3500 В, в то время как
команда
 реактивной
мощности устанавливается на ноль для
работы с единичным коэффициентом
мощности. Фазовый угол
реактивной
мощности устанавливается на ноль для
работы с единичным коэффициентом
мощности. Фазовый угол
 для
преобразования между кадрами abc и dq
определяется из трех фазных напряжений
на стороне низкого напряжения
трансформатора на стороне сети с помощью
контура фазовой автоподстройки частоты
(PLL).
для
преобразования между кадрами abc и dq
определяется из трех фазных напряжений
на стороне низкого напряжения
трансформатора на стороне сети с помощью
контура фазовой автоподстройки частоты
(PLL).
Угловое положение опорного кадра dq контролируется контуром обратной связи, который регулирует компонент оси q, чтобы он был равен нулю, где компонент оси d изображает амплитуду вектора напряжения, а его фаза определяется выходным сигналом контура обратной связи.
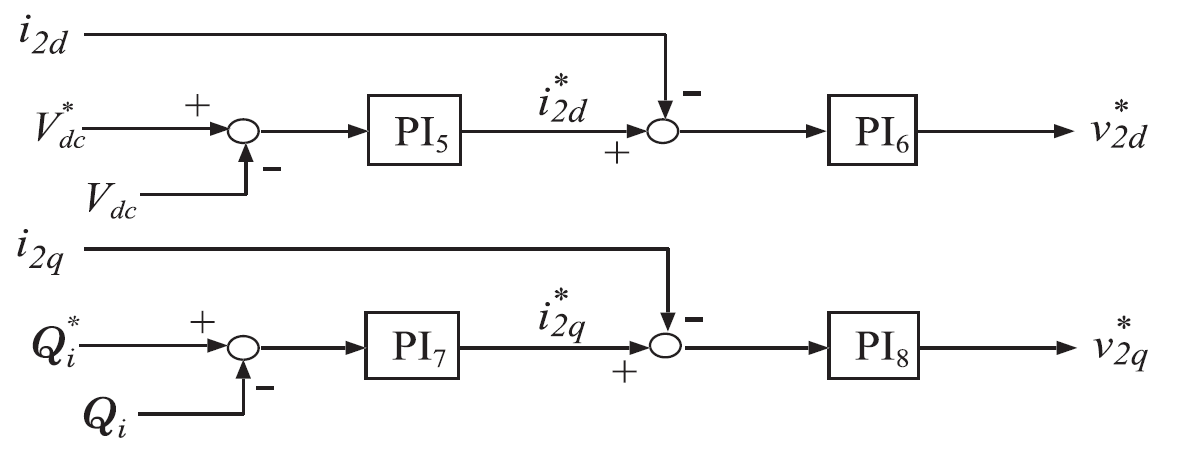
Рис 6 - Система управления инвертором на стороне сети переменного тока.
Подробные графики представлены в документе 3.