

Работа 5
.pdfРабота 5. МОДЕЛИРОВАНИЕ САР В MATHCAD
1. Цель работы
Построение переходных характеристик САР по передаточной функции, рассчитанной по структурной схеме для типового воздействия методом обратного преобразования Лапласа.
2. Краткие сведения
На рисунке 5.1 представлена структурная схема одноконтурной САР.
Рисунок 5.1 – Структурная схема одноконтурной САР
На рисунке 5.1 приняты следующие обозначения: X s – изображение
задающего воздействия |
x t , |
|
E s – изображение |
рассогласования |
|
e t x t yОС t , F s |
– изображение возмущающего воздействия f t , |
||||
Y s – изображение регулируемой величины, YОС s – изображение сигнала |
|||||
обратной связи |
yОС t , |
W1 s |
– |
передаточная функция |
исполнительного |
механизма, W2 s |
– передаточная |
функция объекта регулирования, WОС s – |
|||
передаточная функция обратной связи.
Для регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев.
2.1 Виды регуляторов
Пропорциональный (П) регулятор с передаточной функцией:
WП s kp ,
где k p – пропорциональный коэффициент стабилизирующий отклонение регулируемой величины.

Выходной сигнал тем больше, чем сильнее регулируемая величина отклоняется от уставки. Если входной сигнал равен уставке, то выходной равен нулю.
При использовании пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегрирующий (И) регулятор с передаточной функцией:
WИ s 1 , Ti s
который используется для устранения статической ошибки. Она позволяет регулятору «учиться» на предыдущем опыте.
Дифференцирующий (Д) регулятор с передаточной функцией:
WД s Td s
противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей.
Д-регулятор генерирует управляющее воздействие только при изменении регулируемой величины:
Y s dEdt .
На практике простейшие П, И, Д регуляторы комбинируются в регуляторы вида ПИ, ПД, ПИД (рисунок 5.2).
а) |
б) |
в) |

Рисунок 5.2 – Схемы ПИ, ПД, ПИД - регуляторов
Пропорционально-интегральный (ПИ) регулятор (рисунок 5.2, а)
является одним из наиболее универсальных регуляторов с передаточной функцией:
WПИ s k p |
Ti s 1 |
|
|
|
1 |
|
|
|
|
k p |
1 |
|
|
|
|
Ti s |
|
||||||
|
|
|
|
Ti s |
|||
и с формулой выходного сигнала:
U t P I k p t |
1 |
t t dt , |
|
T |
|
||
|
|
|
|
|
i |
0 |
|
где: U t – выходной сигнал; Р – пропорциональная часть; I – интегральная |
|||
часть; k p – коэффициент пропорциональности; Ti – постоянная |
времени |
||
интегрирования (время изодрома); t – сигнал рассогласования, |
разница |
||
между сигналом обратной связи и заданием (может быть заменен другими сигналами, в зависимости от структурной схемы системы, но суть та же.)
Пропорционально-дифференциальный (ПД) регулятор (рисунок 5.2,
б) с передаточной функцией:
WПД s k p Td s
и с формулой выходного сигнала:
U t kp t Td d t , dt
где Td – постоянная времени дифференцирования, определяющая величину
регулирующего воздействия по производной от отклонения.
В установившихся режимах регулятор ведет себя как обычный П- регулятор. Величина статической ошибки остается такой же, как и в случае применения П-регулятора.
Пропорционально-интегрально-дифференциальный (ПИД)
регулятор (рисунок 5.2, в) с передаточной функцией:
WПИД s kp |
1 |
Td s kp |
|
|
|
1 |
|
|
Td |
|
|
1 |
|
s |
|||||||||
|
|
|
|
||||||||
Ti s |
|
|
|
|
kp Ti s |
|
|
kp |
|
||
|
|
|
|
|
|
|
|||||
и с формулой выходного сигнала |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
t |
|
|
|
d t |
|||
U t P I D k p t ki t dt kd |
|||||||||||
|
dt |
||||||||||
|
|
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
Задачей ПИД-регулятора является поддержание заданного значения измеряемой (регулируемой) величины. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что-то же самое, производной измеряемой величины).
Часто в качестве параметров ПИД-регулятора используются:
- относительный диапазон:
Pb 1 ; k p
- постоянные интегрирования и дифференцирования, имеющие размерность времени:
Ti 1 , ki
Td kd .
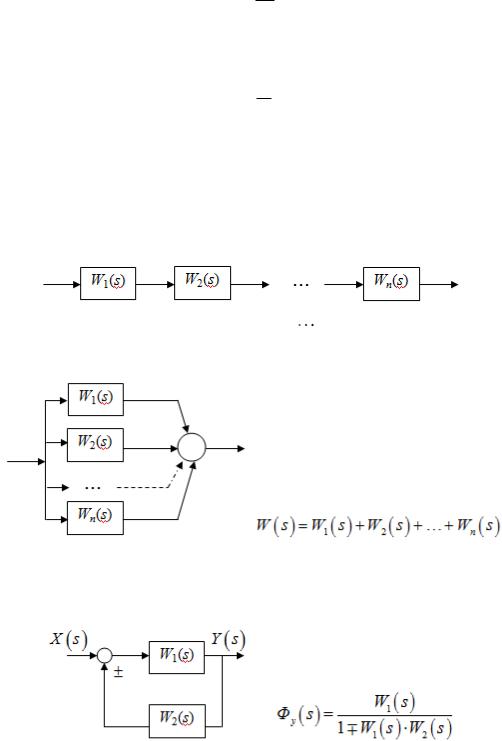
2.2 Правила расчета передаточных функций
1. Расчет передаточной функции последовательно |
соединенных |
|
звеньев: |
|
|
W s W1 s W2 s |
Wn s |
|
|
|
|
|
|
|
2. Расчет передаточной функции параллельно соединенных звеньев:
3. Расчет передаточной функции замкнутого контура по управлению:
2.3 Показатели качества процесса регулирования
По переходной характеристике (рисунок 5.3) можно определить и рассчитать следующие показатели качества:
- статическую ошибку e0 – постоянная ошибка в равновесном (установившемся, статическом) режиме системы;
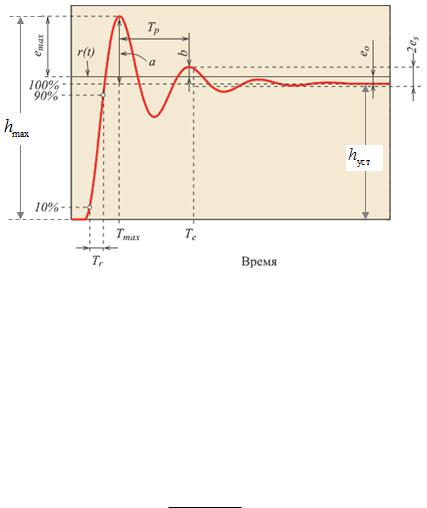
Рисунок 5.3 – График переходной характеристики
-время регулирования – время установления Te с заданной погрешностью es (время, по истечении которого погрешность регулирования не превышает заданного значения es ). Обычно es находится в пределах (1 –
5)%. Соответственно, время установления обозначают T0.01 , T0.05 ;
-перерегулирование – превышение первого выброса над установившемся значением переменной. Обычно выражается в процентах от установившегося значения и равно:
% hmax hуст 100% ;
hуст
- время нарастания Tr – интервал времени, в течение которого
выходная переменная нарастает от 10 % до 90 % от своего установившегося значения;
- период затухающих колебаний Tp .
Строго говоря, затухающие колебания не являются периодическими, поэтому здесь под периодом понимается расстояние между двумя соседними максимумами переходной характеристики.
2.4 Расчет параметров ПИД-регулятора по методу ЗиглераНикольса
Для расчета параметров ПИД-регулятора по методу Зиглера-Никольса используются всего два параметра: a и L.
Для определения L проводят касательную в точке максимального угла наклона касательной (рисунок 5.4), при этом задержка L должна определяться в точке пересечения касательной с осью времени.
a определяется в точке пересечения касательной с осью Y.
В качестве примера для нахождения a и L на рисунке 5.4 приведен отклик на единичный скачок системы с объектом второго порядка и ПИД-
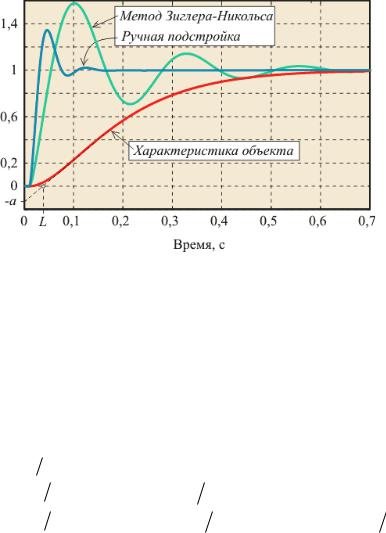
регулятором, настроенным по таблице 5.2, и переходная характеристика самого объекта управления.
Рисунок 5.4 – Результат настройки ПИД-регулятора по методу ЗиглераНикольса
Формулы для расчета коэффициентов регуляторов представлены в таблице 5.2.
Таблица 5.2 – Формулы для расчета коэффициентов регулятора по методу Зиглера-Никольса
Регулятор |
|
Расчет по отклику на скачок |
|
||
|
k p |
|
Ti |
|
Td |
|
|
|
|
|
|
П |
1 a |
|
– |
|
– |
|
|
|
|
|
|
ПИ |
0.9 a |
|
3L kp |
|
– |
|
|
|
|
|
|
ПИД |
1.2 a |
|
0.9L kp |
|
0.5L kp |
|
|
|
|
|
|
Из характеристики объекта получены значения a = 0.135 и L = 0.035 с. По таблице 5.2 для этих значений a и L можно найти коэффициенты ПИД регулятора: k p = 8.9; Ti = 0.00796 c; Td = 0.156 c.
2.5 Ручная настройка
Расчет параметров по формулам не может дать оптимальной настройки регулятора, поскольку аналитически полученные результаты основываются на сильно упрощенных моделях объекта. Кроме того, модели используют параметры, идентифицированные с некоторой погрешностью. Поэтому после расчета параметров регулятора желательно сделать его подстройку. Подстройку можно выполнить на основе правил, которые используются для ручной настройки. Эти правила получены из опыта, теоретического анализа
ичисленных экспериментов. Они сводятся к следующему:
-увеличение пропорционального коэффициента увеличивает быстродействие и снижает запас устойчивости;
-с уменьшением интегральной составляющей ошибка регулирования с течением времени уменьшается быстрее;
-уменьшение постоянной интегрирования уменьшает запас устойчивости;
-увеличение дифференциальной составляющей увеличивает запас устойчивости и быстродействие.
Отметим, что применение правил возможно только после предварительной настройки регулятора по формулам. Попытки настроить регулятор без начального приближенного расчета коэффициентов могут быть безуспешными. Сформулированные выше правила справедливы только в окрестности оптимальной настройки регулятора. Вдали от нее эффекты могут быть иными.
На рисунке 5.4 приведен отклик на единичный скачок той же системы при параметрах k p = 15; Ti = 0.013 c; Td = 0.525 c полученных путем ручной
подстройки.
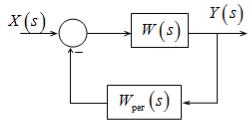
3.Порядок выполнения работы
1.Создать новый файл, дать файлу название и записать на жесткий диск. В дальнейшем в процессе работы периодически (один раз в 10 – 15 мин производить перезапись файла).
2.Используя структурную схему, приведенную на рисунке 5.5, составить передаточную функцию замкнутого контура со звеном вида:
|
W s |
k1 |
|
|
|
– апериодическое звено первого порядка (выбирать в |
|
|
T s 1 |
||
|
|
1 |
|
|
|
соответствии с вариантом задания из таблицы 5.1) |
|
и |
Wрег s |
– передаточной функции регулятора. В качестве Wрег s |
|
последовательно подставлять П, ПИ, ПД, ПИД - регуляторы.
Рисунок 5.5 – Структурная схема для исследования
3.Построить переходные характеристики САР обратным преобразованием Лапласа.
4.По графикам переходных характеристик определить показатели качества процесса регулирования при коэффициентах kp 0.1; Ti 1; Td 1.
5.Подобрать параметры ПИ и ПИД регуляторов предварительной настройкой параметров регулятора по методу Зиглера-Никольса.
Таблица 5.1 - Варианты задания |
|
|
|
|
|
|
|
|
|
||||||
Вариант |
|
|
W s |
Вариант |
|
|
W s |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
5 |
|
|
|
7 |
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1s 1 |
|
|
|
0.5s 1 |
||||||||
2 |
0.5 |
|
|
|
8 |
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
0.02s 1 |
|
0.05s 1 |
||||||||||||
3 |
0.1 |
|
|
|
9 |
0.2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0.01s 1 |
|
|
|
0.5s 1 |
|||||||||
4 |
0.2 |
|
|
|
10 |
0.1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0.01s 1 |
|
|
|
|
2s 1 |
||||||||
5 |
0.5 |
|
|
|
11 |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||||
|
|
0.03s 1 |
|
|
0.03s 1 |
||||||||||
6 |
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
0.2s 1
6.Подбрать вручную настройки ПИД регулятора используя правила, приведенные в п. 2.5 так, чтобы уменьшить:
- перерегулирование;
- период затухающих колебаний Tp ;
- время установления Te с заданной погрешностью es .
3.1Пример реализации в MathCad
1.Построение переходных характеристик САР обратным преобразованием Лапласа выполнить как в лабораторной работе 2.
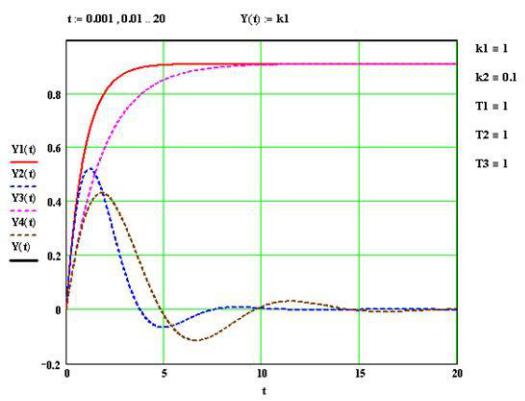
2.По результатам построения переходных характеристик можно получить их реализации для различных значений параметров звеньев САР
(постоянных Т1, Т2, Т3, k1, k2).
Для этого следует задаться численными значениями постоянных, задать промежуток времени наблюдения переходного процесса САР и построить графики изменения функций Y(t) (рисунок 5.6).
4.Содержание отчета
1.Цель лабораторной работы.
2.Переходные характеристики с П, ПИ, ПД, ПИД - регуляторами.
3.Рассчитанные критерии качества.
4.Переходные характеристики с ПИД-регулятором, настроенным по методу Зиглера-Никольса, найденные коэффициенты ПИД регулятора.
5. Переходные характеристики с ручной настройкой.
3.Выводы по проделанной работе.
4.Распечатать работу на принтере или сдать в электронном виде через систему googleclassroom.
Рисунок 5.6 – Y(t) – единичное ступенчатое воздействие; Y1(t) – САР с П- регулятором; Y2(t) – САР с ПИ-регулятором; Y3(t) – САР с ПД-регулятором; Y4(t) – САР с ПИД-регулятором
Вопросы для самоконтроля
1.Какими свойствами обладает пропорциональное звено?
2.Какими свойствами обладает интегрирующее звена?
3.Какими свойствами обладает дифференцирующее звена?
4.Что такое обратная связь?
5.Что такое передаточная функция?
6.Что такое переходная характеристика?
7.Понятие о прямом и обратном преобразовании Лапласа, его
свойства.
11.Перечислите показатели качества САР.