

LR5_APP_Andryushkov
.docxМИНИСТЕРСТВО ЗДРАВООХРАНЕНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования «Санкт-Петербургский государственный химико-фармацевтический университет» Министерства здравоохранения Российской Федерации (ФГБОУ ВО СПХФУ Минздрава России)
Кафедра Процессов и аппаратов химической технологии
Отчет по практической работе №5
на тему
МОДЕЛИРОВАНИЕ САР В MATHCAD
по учебной дисциплине
Автоматизация процессов производства ГЛС
Семестр 7
Факультет химической технологии
Форма обучения - очная
по направлению подготовки (специальности): 18.03.01 Производство готовых лекарственных средств
уровень высшего образования – бакалавриат
Выполнил:
студентка 4 курса 570 группы Проявина
Л.В. /![]() /
/
Проверил: Ганин_П.Г. /______________/
Сорокин_В.В. / ______________/
Санкт-Петербург,
2020 год
Цель работы:
Построение переходных характеристик CAP по передаточной функции, рассчитанной по структурной схеме для типового воздействия методом обратного преобразования Лапласа.
Краткие сведения: структурная схема одноконтурной CAP.
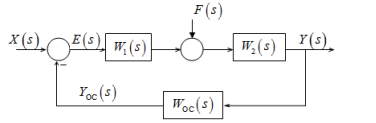
На рисунке принято следующее изображение:
X(s) – изображение задающего воздействия х(t);
Е(s) – изображение рассогласования е(t) = x(t) – yос(t);
F(s) – изображение возмущающего воздействия f(t);
Y(s) – изображение регулируемой величины;
Yос(s) – изображение сигнала обратной связи yос(t);
W1(s) – передаточная функция исполнительного механизма;
W2(s) – передаточная функция объекта регулирования;
Wос(s) – передаточная функция обратной связи.
Для регулирования объектами управления используют типовые регуляторы:
Пропорциональный (П) регулятор с передаточной функцией:
WП (s) = kp,
Где kp – пропорциональный коэффициент, стабилизирующий отклонение регулируемой величины.
Интегрирующий (И) регулятор с передаточной функцией:
WИ(s)
=
 ,
,
Используется для устранения статической ошибки. Она позволяет регулятору «учиться» на предыдущем опыте.
Дифференцирующий (Д) регулятор с передаточной функцией:
WД(s) = Tds,
Противодействует предполагаемым отклонением регулируемой величины, которые могут произойти в будущем.
Пропорционально-интегральный (ПИ) регулятор с передаточной функцией:
WПИ(s) = kp + ,
Является одним из наиболее универсальных регуляторов.
Пропорционально-дифференциальный (ПД) регулятор с передаточной функцией:
WПД(s) = kp + Tds.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор с передаточной функцией:
WПИД(s) = kp + + Tds,
Задачей ПИД регулятора является поддержание заданного значения измеряемой (регулируемой) величины. Он измеряет отклонение стабилизируемой величины от установки (заданного значения) и выдает управляющий сигнал, являющийся суммой трех слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения, третье пропорционально производной отклонения.
Выполнение работы.
Вариант №3
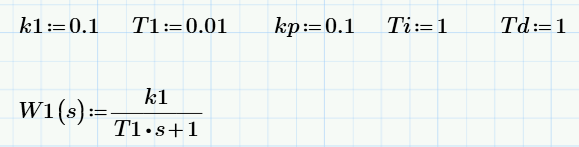
Составить передаточные функции П, ПИ, ПД, ПИД регуляторов соответствующих САР. Для анализа САР предположим, что объект регулирования представляет собой инерционное звено:
П регулятор:

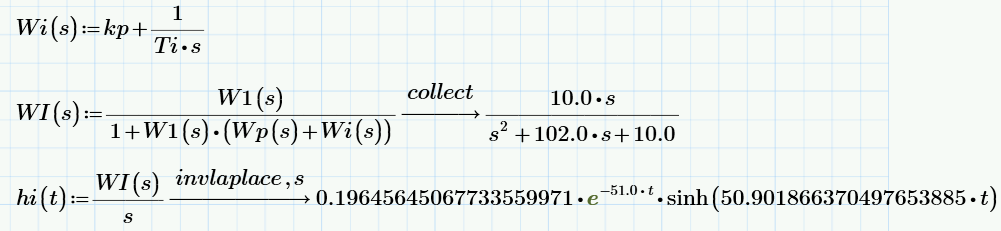
ПИ регулятор:
ПД регулятор:

![]()
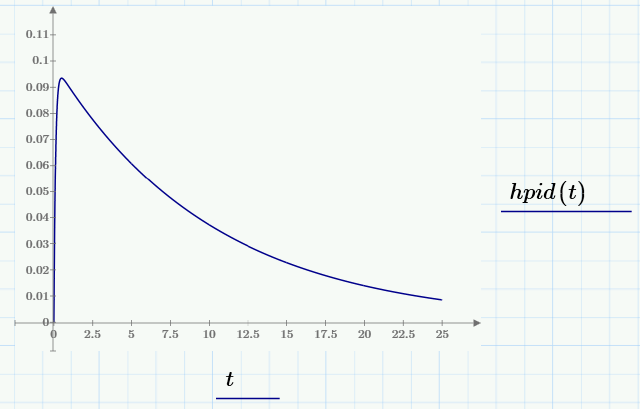
ПИД регулятор:
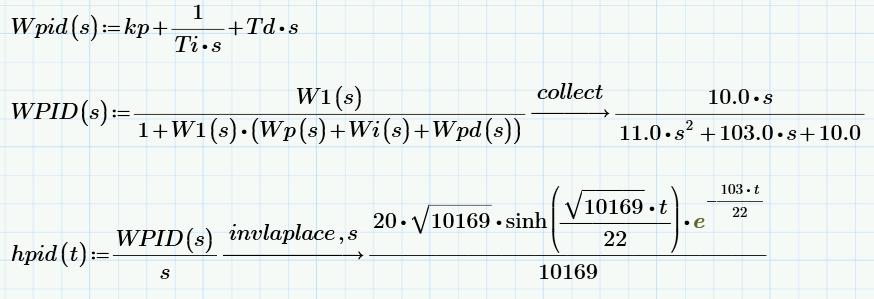
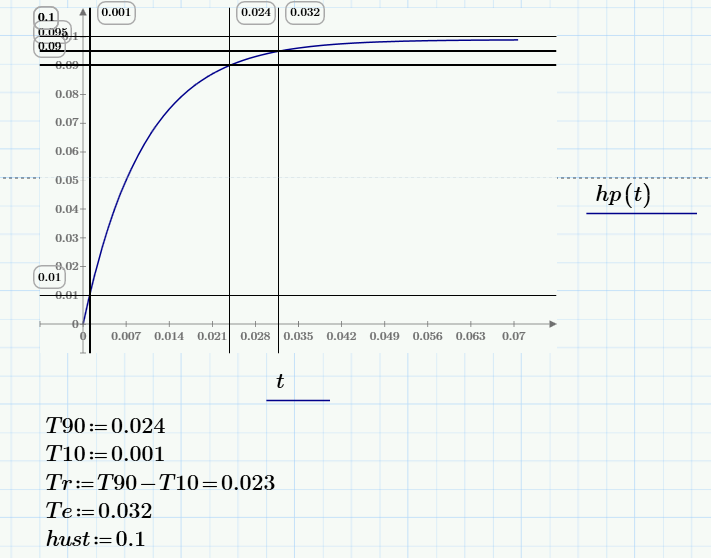
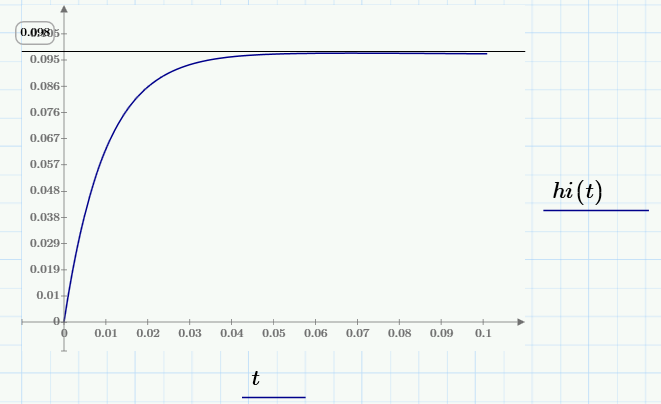
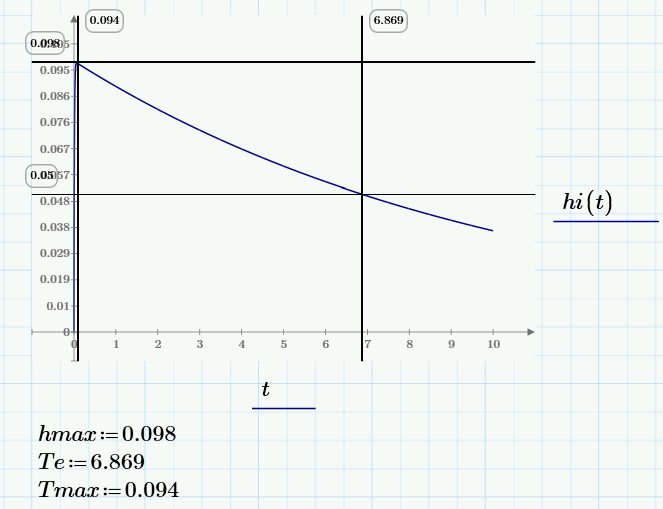
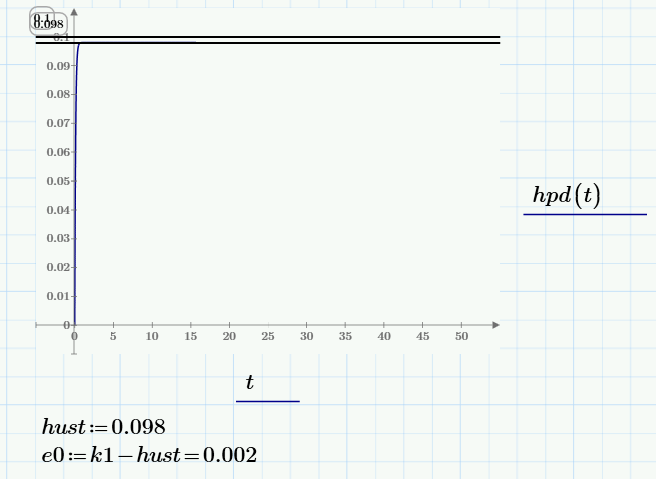
Построим графики изменения функции h(t):
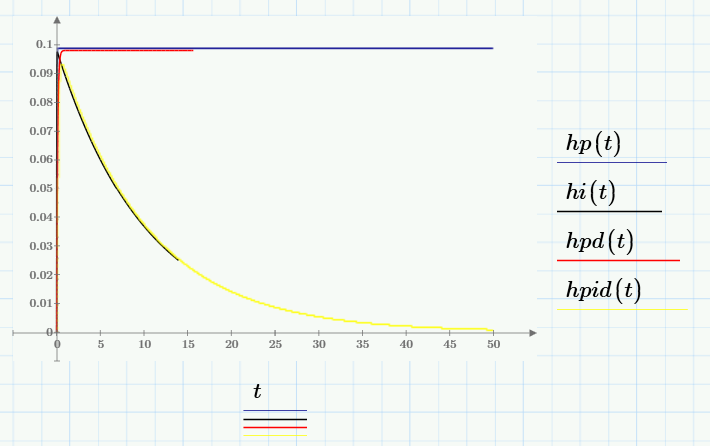
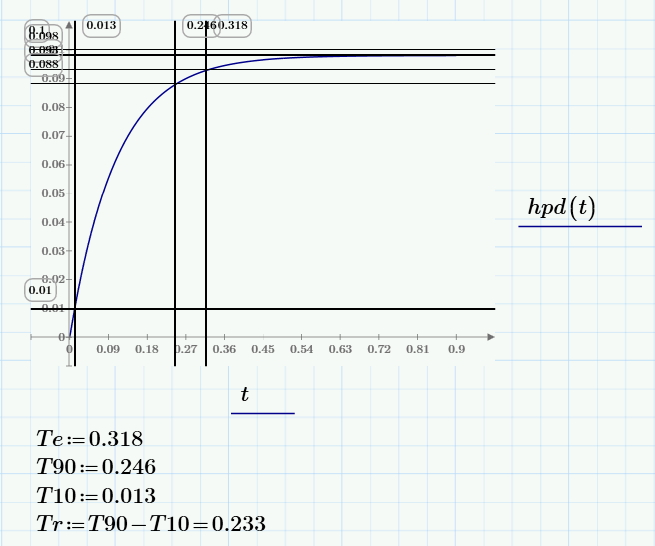
По графикам переходных характеристик определяем следующие показатели качества процесса регулирования:
Статическая ошибка e0 – постоянная ошибка в равновесном режиме системы.
Перерегулирование emax – превышение первого выброса над установившимся значением переменной.
Время нарастания Tr – интервал времени, в течение которого выходная переменная нарастает от 10% до 90% от своего установившегося значения.
Время регулирования и период затухающих колебаний определены не были, так как графики не являются колебательными.

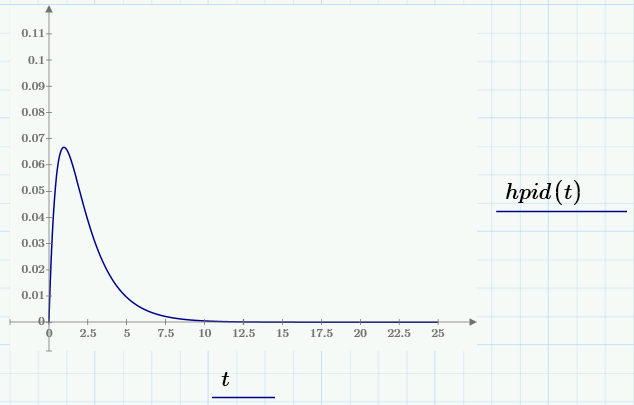
Ручная настройка ПИД-регулятора:
Изменяя значения kp, Ti и Td по правилам, перечисленным ниже:
![]()
Получаем улучшенный график:
Основные правила:
• Увеличение пропорционального коэффициента увеличивает быстродействие и снижает запас устойчивости;
• С уменьшением интегральной составляющей ошибка регулирования с течением времени уменьшается быстрее;
• Уменьшение постоянной интегрирования уменьшает запас устойчивости;
• Увеличение дифференциальной составляющей увеличивает запас устойчивости и быстродействие.
Вывод: в ходе данной работы мы построили переходные характеристики CAP по передаточной функции, рассчитанной по структурной схеме для типового воздействия методом обратного преобразования Лапласа и осуществили ручную настройку ПИД-регулятора.