

Лаб5 / 7408_MMOSU_LR5_Brigada3
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра САУ
отчет
по лабораторной работе №5
по дисциплине «Математическое моделирование объектов и
систем управления»
Тема: Моделирование нечетких систем
Вариант 3
Студент гр. 7408 |
|
Лебедев Р. А. Трусова Е. С. |
Преподаватель |
|
Шпекторов А. Г. |
Санкт-Петербург
2021
Цель работы.
Получить представление о способах создания нечетких моделей, изучить функции языка MATLAB библиотеки FUZZY LOGIC TOOLBOX, создать исследовать нечеткую модель объекта управления.
Исходные данные.
Нечеткая модель управления автомобилем. Объект управления – автомобиль. Он должен двигаться с наименьшим расходом топлива.
Входные переменные:
скорость;
ускорение;
Выходные переменные:
номер передачи (нейтральная, 1-я, 2-я, 3-я, 4-я, 5-я);
действие с педалью газа (нажать, отпустить).
Задание на работу.
Для заданного объекта управления требуется предложить и реализовать в пакете MATLAB нечеткую модель управления, последовательно наращивая число доступных для наблюдения входных переменных и их значений. После-довательность выполнения задания включает в себя:
1. Задание для каждого входа и выхода лингвистических переменных с множеством возможных значений (термов):
а) вариант усеченного множества предполагает задание 2–3 термов, необ-ходимых для описания лингвистических переменных;
б) вариант полного множества предполагает задание 4–7 термов, необхо-димых для описания лингвистических переменных.
2. Задание таблицы правил логического вывода для определения значения выхода системы управления.
Предложить 2 варианта правил (если это возможно):
а) для неполного набора входных переменных, с «загрубленным» описани-ем возможных сочетаний значений входных переменных;
б) для полного набора входных переменных с приближением к реальному описанию возможных ситуаций управления.
3. Для каждого варианта систем нечеткого вывода построить нечеткую мо-дель управления в редакторе систем нечеткого вывода и представить диаграм-мы и поверхности нечеткого вывода. При этом для каждого из вариантов рас-смотреть по два варианта множества возможных значений входных перемен-ных. Сделать выводы о влиянии степени детализации представления входного пространства, степени детализации значений выходного пространства, влиянии включения дополнительных правил в систему логического вывода или их ис-ключения.
4. Привести примеры 1-2 сравнимых между собой ситуаций логического вывода для нескольких значений входных переменных для разных систем логического вывода.
5. Провести моделирование нечеткой системы с объектом управления в среде SIMULINK (модели предоставляются преподавателем).
Ход работы.
Заданные лингвистические переменные для каждого входа и выхода представлены в таблицах 1 и 3, таблицы правил логического вывода – в таблицах 2 и 4 (для неусеченной и усеченной нечетких моделей соответсвенно).
Таблица 1 – Лингвистические переменные для усеченной нечеткой модели
Переменные |
Термы |
|
Входные |
Speed |
low, mid, high (низкая, средняя, высокая) |
Acceleration |
positive, negative (+,-) |
|
Выходные |
KPP |
neutral, reduct (1,2,3), multiplic (4,5) |
Gaz |
press, release |
|
Таблица 2 – Логика для усеченной нечеткой модели
Speed |
Acceleration |
KPP |
Gaz |
null |
- |
neutral |
press |
low |
- |
reduct |
press |
mid |
- |
reduct |
press |
high |
- |
multiplic |
press |
- |
negative |
neutral |
release |
- |
positive |
- |
press |
а)

б)

в)

г)
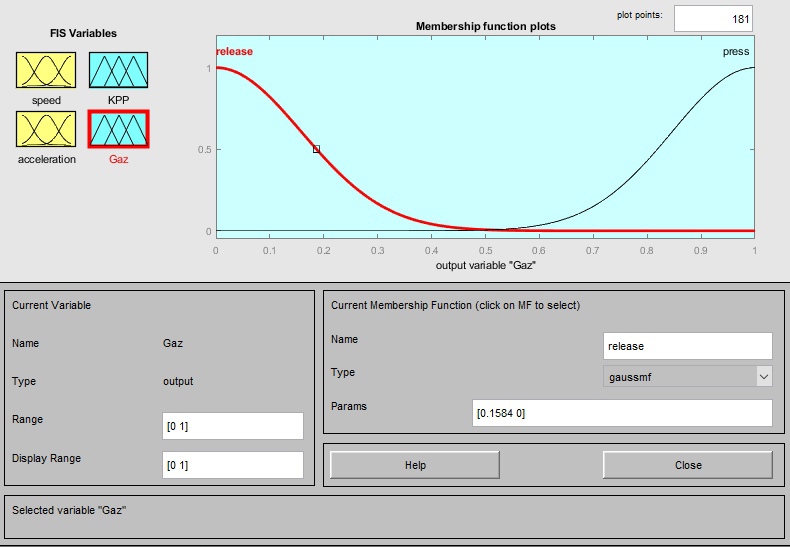
Рисунок 1 – Окна редактора функции принадлежности
(усеченная модель)

Рисунок 2 – Фазификация и дефазификация (усеченная модель)

Рисунок 3 – График рабочей поверхности (усеченная модель)
Таблица 3 – Лингвистические переменные для неусеченной модели
Переменные |
Термы |
|
Входные |
Speed |
null (0), very_low(0-20), low(10-50), mid(20-80), high(40-110), very_high(60-150) |
Acceleration |
n_very_high, n_high, p_high, very_high |
|
Выходные |
KPP |
N, 1, 2, 3, 4, 5 |
Gaz |
release, half, maxpress |
|
Таблица 4 – Логика для неусеченной нечеткой модели
Speed |
Acceleration |
KPP |
Gaz |
null (0) |
- |
1 |
half |
verylow(0-20) |
- |
1 |
half |
low(10-50) |
- |
2 |
half |
mid(20-80) |
- |
3 |
half |
high(40-110) |
- |
4 |
half |
veryhigh(60-150) |
- |
5 |
maxpress |
- |
Nveryhigh |
N |
release |
- |
Nhigh |
N |
release |
- |
Phigh |
- |
half |
- |
Pveryhigh |
- |
maxpress |
а)

б)

в)

г)
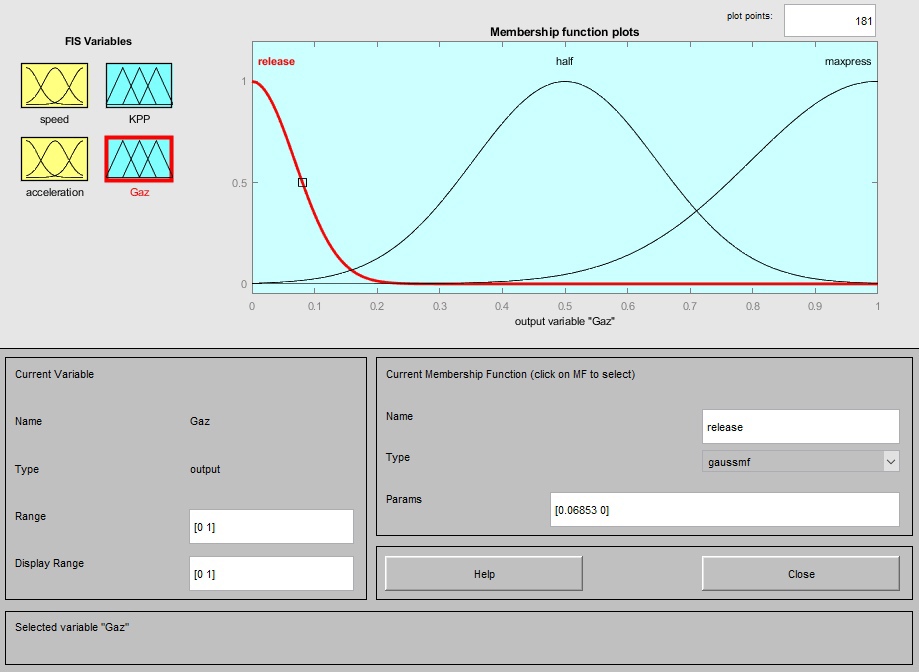
Рисунок 4 – Окна редактора функции принадлежности
(неусеченная модель)

Рисунок 5 – Фазификация и дефазификация (неусеченная модель)

Рисунок 6 – График рабочей поверхности (неусеченная модель)

Рисунок 7 – Модель нечеткой системы в среде Simulunk
а)

б)

Рисунок 8 – Результаты моделирования работы
нечеткой системы управления
Вывод.
В ходе данной лабораторной работы были изучены способы создания нечетких моделей с помощью библиотеки FUZZY LOGIC TOOLBOX, созданы две (усеченная и неусеченная) нечеткие модели управления движением автомобиля с наименьшим раходом топлива, а также было выполнено моделирование нечеткой системы с объектом управления в среде SIMULINK.