

Методическое пособие 703
.pdfразличные значения, зависящие от величины внешнего воздействия (нагрузки). Чем значительней расход жидкости Q в системе, тем больше открыта задвижка и, следовательно, тем ниже в состоянии равновесия будет находиться поплавок.
Характерные особенности статической системы регулирования: равновесие системы статического регулирования может быть при различных значениях регулируемой величины; каждому значению регулируемой величины соответствует единственное определенное значение регулирующего органа; контур регулирования системы должен состоять из статических звеньев, осуществляющих зависимость
хвых=f(хвх) .
Статические регуляторы работают при обязательном отклонении регулируемой величины y от требуемого значения у0. Это отклонение тем больше, чем больше возмущение f, и называется статической ошибкой регулятора.
Чем больше коэффициент передачи К регулятора, тем на большую величину будет открываться заслонка при одних и тех же значениях , обеспечивая большую величину потока Q, при этом статическая характеристика системы пойдет более полого. Поэтому для уменьшения статической ошибки надо увеличивать коэффициент передачи регулятора. Этот параметр регулирования получил название статизма d и равен тангенсу угла наклона статической характеристики, построенной в относительных единицах:
d = tg( ) = y/yн) / ( f/fн), |
(1.1) |
где yн, fн - точка номинального режима системы. При достаточно больших значениях К имеем d 1/K.
В схему САР уровня жидкости (рис. 1.16) включен электродвигатель постоянного тока.
31
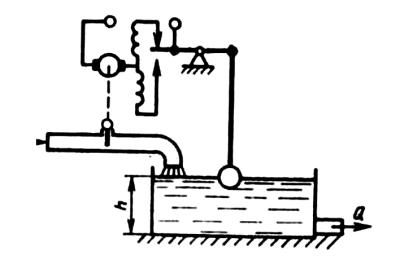
Рис. 1.16. Астатическая САР
В ней при увеличении (уменьшении) расхода жидкости поплавок (чувствительный элемент) опускается (поднимается)
изамыкает верхний (нижний) контакт. При этом электродвигатель начинает вращаться в таком направлении, чтобы поднять (опустить) задвижку — регулирующий орган и увеличить (уменьшить) приток жидкости. Такая схема — пример астатического регулирования, когда при различных постоянных значениях внешнего воздействия на объект отклонение регулируемой величины от требуемого значения по окончании переходного процесса становится равным нулю. Степень открытия заслонки зависит от расхода жидкости, а поплавок при заданном значении уровня занимает одно определенное положение, равное заданному. Связать поплавок
изаслонку следует таким образом, чтобы одному положению поплавка могло соответствовать любое положение заслонки.
Характерные особенности астатической системы регулирования:
равновесие системы астатического регулирования имеет
32
место при единственном значении регулируемой величины, равном заданному;
регулирующий орган в астатической системе должен иметь возможность занимать различные положения при одном
итом же значении регулируемой величины.
Вреальных астатических системах первое условие выполняется с некоторой погрешностью, так как чувствительный элемент обладает разрешающей способностью (нечувствительностью). Для осуществления указанной связи между чувствительным элементом и регулирующим органом в контур регулирования должно быть введено астатическое звено. В данном случае таким звеном является электродвигатель. При отсутствии напряжения вал электродвигателя неподвижен в любом положении, при наличии напряжения он непрерывно вращается. Астатическое звено находится в состоянии безразличного равновесия при отсутствии на него внешнего воздействия и выходит из равновесия при наличии воздействия.
Следует различать системы статические и астатические по отношению к возмущающему и управляющему воздействиям. В системах, статических по отношению к возмущающим воздействиям, не одинаковым по постоянной величине, возмущающим воздействиям соответствует различное значение регулируемой величины. В астатических системах по отношению к возмущающим воздействиям значение регулируемой величины не зависит от величины возмущающего воздействия. Значение регулируемой величины остается постоянным, равным заданному.
Всистемах, статических по отношению к управляющим воздействиям, постоянным значениям этого воздействия соответствует постоянная ошибка системы, величина которой зависит от величины управляющего воздействия.
В астатических системах по отношению к управляющему воздействию после окончания переходного процесса ошибка равна нулю.
33

Для пояснения всего сказанного выше на рис. 1.17 и 1.18 приведены кривые процессов в статической и астатической системах по отношению к возмущающему f (t) и управляющему g (t) воздействиям.
Рис. 1.17. Переходные процессы в статической (кривая 1) и астатической (кривая 2) системах по отношению к возмущающему воздействию
Рис. 1.18. Переходные процессы в статической (кривая 1) и астатической (кривая 2) системах по отношению к управляющему воздействию
34

Астатический регулятор применяется, если статическая ошибка регулирования недопустима и регулируемая величина должна поддерживать постоянное требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической системы не имеет наклона. Для того чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено. Астатическое звено отличается тем, что каждому значению входной величины может соответствовать множество значений выходной величины. Так, для регулирования уровня воды в астатическом режиме может быть применен импульсный двигатель. Если уровень воды понизится, то появившееся значение включит импульсный двигатель и он начнет открывать заслонку до тех пор, пока значение не станет равным нулю (по определенному порогу). При поднятии уровня воды значение сменит знак, и запустит двигатель в противоположную сторону, опуская заслонку.
Астатические регуляторы не имеют статической
ошибки, но они инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов системы управления.
1.5. Классификация САР в зависимости от идеализации, принятой при их математическом описании
При анализе и расчете САР возникает необходимость выбора с определенной степенью приближения адекватной математической модели, которая определяла бы с течением времени изменение переменных состояния системы.
Следует отметить, что почти все САР представляют собой нелинейные системы, которые содержат как переменные, так и
35
распределенные параметры, в которых значение переменных в данный момент времени может зависеть не только от текущих, но и от прошлых значений этих переменных.
Точное математическое описание САР представляет собой большие трудности и не всегда связано с практической необходимостью.
Методы теории автоматического регулирования разработаны применительно к различным типовым математическим моделям реальных систем автоматического регулирования.
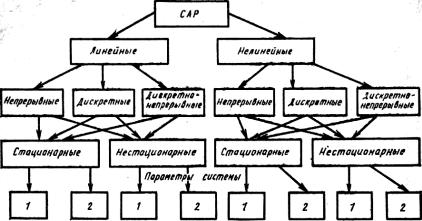
САР подразделяют на линейные и нелинейные (рис. 1.19) в зависимости от того, какую математическую модель выбирают при их исследовании (являются ли линейными или нелинейными дифференциальные, интегральные, дифференциально-разностные уравнения, которые применяют при их математическом описании).
Рис. 1.19. Классификация САР в зависимости от идеализации, принятой при их математическом описании: 1,2 — соответственно сосредоточенные и распределенные параметры
36
Линейные и нелинейные системы подразделяют на следующие три класса: непрерывные, дискретные и дискретно-
непрерывные. Непрерывные системы описываются дифференциальными уравнениями; дискретные— дифференциально-разностными, а дискретно-непрерывные — обоими видами уравнений. Каждый из этих трех классов подразделяют на подклассы:
стационарные системы с сосредоточенными параметрами; стационарные системы с сосредоточенными и
распределенными параметрами; нестационарные, или переменные, системы с
сосредоточенными параметрами; нестационарные, или переменные, системы, с
сосредоточенными и распределенными параметрами.
Кроме того, системы (или их математические модели) каждого из классов и подклассов могут быть подразделены на
детерминированные или статистические.
Математическую модель системы называют детерминированной, если приложенные к ней воздействия и параметры модели являются постоянными или детерминированными функциями переменных состояния и времени. Математическую модель системы называют статистической, если приложенные к ней воздействия и параметры модели являются случайными функциями или случайными величинами.
1.6.Системы непрерывного и дискретного действия
Взависимости от прохождения и характера сигналов системы автоматического регулирования могут подразделяться на непрерывные и дискретные, или прерывистые.
Если в процессе регулирования структура всех связей в системе остается неизменной, то такая система является системой непрерывного регулирования. Сигналы на выходе
37
элементов такой системы являются непрерывными функциями воздействий и времени. Между элементами на входе и выходе системы существует непрерывная функциональная связь. Примером системы непрерывного действия может служить схема, показанная на рис. 1.5, в которой ток в цепи якоря является непрерывной функцией напряжений на входе усилителей.
Системы прерывистого регулирования отличаются тем, что в них через дискретные промежутки времени происходит размыкание или замыкание цепи воздействий.
Системы прерывистого действия подразделяют на импульсные и релейные. В импульсных системах размыкание цепи воздействий производится принудительно и периодически специальным прерывающим устройством. В течение передачи импульсов процессы в этих системах протекают так же, как и в непрерывных САР. Импульсные системы содержат импульсные элементы и осуществляют квантование сигнала по времени. В системах релейного действия размыкание или замыкание цепи воздействия производится одним из элементов системы при непрерывном значении входною воздействия. Размыкание или замыкание осуществляется с помощью реле или элемента, имеющего релейную характеристику. Реле срабатывает при определенном значении воздействия на его чувствительный орган.
Релейные системы осуществляют квантование сигнала по уровню. Пример САР релейного действия показан на рис. 1.16. Следует отметить, что существуют релейно-импулъсные, или кодово-импульсные системы, в которых происходит квантование сигнала как по времени, так и по уровню.
К кодово-импульсным системам относятся системы, содержащие в контуре электромеханические, пневматические, электрогидравлические и гидравлические управления электронные вычислительные машины, или их элементы. Такие кодово-импульсные системы называют цифровыми.
В зависимости от конструктивного выполнения САР
38
подразделяют на электронные, электрические.
1.7. Основные требования, предъявляемые к САР
Применимость САР в каждом конкретном случае зависит от того, насколько система удовлетворяет предъявляемым к ней требованиям. Основным требованием является сохранение заданной функциональной зависимости между управляющими и регулируемыми переменными на входе и выходе системы. Идеальных систем, которые бы выполняли это требование абсолютно точно, не существует. Поэтому речь может идти о приближении работы системы к идеальной. Чем больше степень этого приближения, тем сложнее получается система. В связи с этим задача проектирования САР заключается в том, чтобы найти разумный компромисс между стремлением получить высокое качество работы и достигнуть это простыми техническими средствами. Требования, предъявляемые к поведению системы в динамике, зависят от ее назначения, характера работы, конкретных условий работы и т. д. Различают следующие категории требований:
кзапасу устойчивости системы;
квеличине ошибки в установившемся состоянии или статической точности;
кповедению системы в переходном процессе (совокупность этих требований называется условиями качества);
кдинамической точности системы, т. е. к величине ошибки при непрерывно изменяющихся воздействиях.
Наиболее важным и необходимым из перечисленных требований является устойчивость работы системы.
САР из-за наличия обратных связей склонны к колебаниям. В устойчиво работающей системе происходят затухающие с течением времени колебания, и система приходит в согласованное состояние. Устойчивость системы не
39
должна нарушаться во время ее работы при изменении в определенных пределах внешних и внутренних условий, например, окружающей температуры, напряжения питающей сети и т. д. Требование устойчивости должно удовлетворяться с некоторым запасом, предусматривающим возможные изменения параметров системы во время ее работы.
Следует отметить, что принцип обратной связи, лежащий в основе действия САР и применяемый для подавления колебаний и уменьшения ошибки, при определенных условиях может способствовать генерации колебаний и увеличению ошибки.
В качестве примера можно рассмотреть самолет, имеющий автомат курса, который реагирует на отклонение самолета от требуемого направления. Пусть в начальный момент времени под действием возмущающих сил продольная ось самолета не совпадает с требуемым направлением движения. Чувствительный элемент автомата курса вырабатывает сигнал, который заставит отклониться рули направления. В результате этого возникает вращающий момент, который будет стремиться возвратить самолет на заданный курс. Однако в момент, когда продольная ось самолета совпадет с требуемым направлением движения, его вращательное движение не прекратится. Это произойдет потому, что самолет имеет значительный момент инерции и при подходе к заданному курсу будет обладать определенным запасом кинетической энергии, а также потому, что автомат курса, обладающий некоторым запаздыванием, возвратит руль в нейтральное положение лишь через некоторый промежуток времени после того, как продольная ось самолета совпадет с заданным курсом. Поэтому самолет будет отклоняться от заданного курса в направлении, противоположном первоначальному, до тех пор, пока автомат курса не произведет переналадку руля и не возникнет вращающий момент, достаточный для того, чтобы опять возвратить самолет к заданному курсу. Затем весь процесс повторится снова и т. д.
40