

Лекции / 12. Методы и средства измерения неэлектрических величин
.pdfТема 12. МЕТОДЫ И СРЕДСТВА ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИЙ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
12.1. Общие сведения
Под объектом измерения понимается физическая система, процесс, явление и т. д., которые характеризуются одной или несколькими измеряемыми физическими величинами. Как правило, эти величины являются по природе своей неэлектрическими. Поэтому в настоящее время используется большое количество разнообразных первичных измерительных преобразователей и датчиков неэлектрических величин. При этом постоянно развивающийся научно-технический прогресс предъявляет требования к разработке новых преобразователей с улучшенными метрологическими характеристиками.
Практика применения электроизмерительных приборов для измерения неэлектрических величин показала их большую эффективность, поскольку они позволяют обеспечить:
-дистанционное измерение искомых величин, в этом случае датчик удален от средства измерения принимающего его сигналы, например, датчики температуры, расположенные в охлаждающем контуре ядерного реактора;
-измерение сигналов очень малых величин, за счет использования электронных усилителей;
-повышение метрологической надежности результата измерения, за счет использования различных алгоритмов обработки сигнала измерительной информации, например, исключение помехи, введение поправок для компенсации дополнительных погрешностей;
-измерение физических величин, изменяющихся в широком диапазоне частот, например, измерение медленно меняющейся температуры в помещении или измерение ускорения при исследовании объекта на вибростенде;
-более эффективное автоматическое управление;
Измерительный преобразователь (ИП) неэлектрических величин устанавливает однозначную функциональную зависимость между входной измеряемой неэлектрической величиной и выходной электрической величиной. Данная зависи-
мость называется функцией преобразования или статической характеристикой преобразования, т.е. речь идет о связи между информативным параметром выходного сигнала и постоянным во времени информативным параметром входного сигнала. Ее можно описать аналитически, в виде графика или градуировочной таблицы.

Наряду со статической характеристикой для описания динамических свойств преобразователя используются динамические характеристики. Например, скорость преобразования – число измерений в единицу времени, выполняемых с нормируемой точностью; время преобразования – время от начала преобразования до получения результата с нормированной точностью.
Другими важнейшими метрологическими характеристиками измерительных преобразователей являются: чувствительность, основная и дополнительные погрешности (функции влияния), выходное полное сопротивление и т. д.
К неметрологическим характеристикам преобразователей относят габариты, массу, удобство монтажа и обслуживания, взрывобезопасность, устойчивость к механическим, тепловым, электрическим и другим перегрузкам и т. п.
На рис. 12.1 показан пример электроизмерительного прибора для измерения температуры, где в качестве измерительного преобразователя используется термопара ТП . ЭДС термопары, являющаяся величиной функционально связанной с измеряемой температурой, измеряется с помощью милливольтметра mV , шкала которого проградуирована в градусах.
ТП |
mV |
|
Рис.12.1
Вобщем случае сигнал измерительной информации от выхода первичного ИП до "потребителя" может проходить через ряд промежуточных измерительных преобразователей, которые выполняют функции изменения уровня, спектра, вида сигнала.
Вприборах прямого преобразования существенно возрастает суммарная погрешность, поскольку при последовательном соединении результирующая погрешность определяется суммой погрешностей составляющих измерительную цепь преобразователей. Для снижения погрешности используют либо дифференциальные измерительные преобразователи, либо дифференциальные схемы включения преобразователей, что позволяет получить меньшую аддитивную погрешность, меньшую нелинейность функции преобразования, повышенную чувствительность и помехозащищенность.
12.2. Измерительные преобразователи
Выше были приведены определения первичных (датчики) и промежуточных ИП, классифицируемые так по месту их расположения в измерительной цепи. К данной группе преобразователей относятся и унифицированные измерительные

преобразователи, которые состоят из датчика и схемы согласования.
Вунифицированных ИП измеряемая физическая величина преобразуется с использованием источника энергии в нормированную выходную величину. Нормированный токовый выходной сигнал, как правило, находится в диапазоне 0…±1 мА, 0…±5 мА или 0…±20 мА. Внутреннее сопротивление измерительных приборов подключаемых к выходу такого унифицированного преобразователя не должно превышать 1 кОм. Нормированные значения диапазонов сигналов по напряжению составляют 0…±1 В или 0…±10 В, причем внутреннее сопротивление подключаемого на выход ИП измерительного прибора не должно быть меньше 1 кОм.
По характеру преобразования входной измеряемой величины преобразователи подразделяются на линейные, имеющие линейную функцию преобразования,
инелинейные, статическая характеристика которых нелинейна.
Взависимости от вида выходного сигнала все измерительные преобразователи делят на генераторные и параметрические. Выходным сигналом генераторных преобразователей являются ЭДС, напряжение, ток и электрический заряд. Например, упоминавшаяся ранее термопара относится к группе генераторных преобразователей. Выходным сигналом параметрических преобразователей явля-
ется параметр электрической цепи ( R , L , C , M ). Таким образом, при применении параметрических преобразователей требуется дополнительный источник электрической энергии для формирования выходной величины.
К генераторным ИП относятся термоэлектрические, пьезоэлектрические, индукционные и некоторые из электрохимических датчиков. Остальные преобразователи являются параметрическими.
По принципу действия выделяют следующие типы датчиков:
–резистивные измеряемая величина преобразуется в изменение сопротивления датчика;
–емкостные, измеряемая величина преобразуется в изменение емкости;
–индуктивные, измеряемая величина преобразуется в изменение индуктив-
ности;
–гальваномагнитные, построенные на эффекте Холла, преобразующие действующее магнитное поле в ЭДС;
–пьезоэлектрические, динамическое усилие преобразуется в электрический
заряд;
–оптоэлектронные, оптические сигналы преобразуются в электрические.

12.3. Параметрические измерительные преобразователи
Рассмотрим преобразователи данной группы на примере наиболее используемых резистивных измерительных преобразователей.
Реостатные преобразователи. Принцип действия таких ИП основан на изменении активного сопротивления проводника под влиянием входной величины – перемещения. Преобразователь представляет собой реостат, щетка (подвижный контакт) которого перемещается под воздействием измеряемой величины. Следовательно, приборы на основе реостатных преобразователей используются для измерения неэлектрических величин, которые могут быть механически связаны с подвижным контактом.
На рис. 12.2 схематично представлены примеры типовых конструкций реостатных преобразователей. Элементами преобразователя являются: обмотка, нанесенная на каркас, и щетка.
Рис. 12.2
Габаритные размеры преобразователя определяются величиной измеряемого перемещения, сопротивлением обмотки и мощностью, выделяемой в обмотке. При необходимости получения нелинейной функции преобразования используют, как правило, каркасы различного профиля.
Статическая характеристика реостатных ИП имеет ступенчатый (дискретный) характер. При перемещении движка сопротивление изменяется скачками, равными сопротивлению одного витка R . Это приводит к появлению погрешности, максимальная величина которой, приведенная к полному сопротивлению обмотки, равна γ R R . При пропорциональной (линейной) функции преобразования датчика значение погрешности оценивается как γ 1
R . При пропорциональной (линейной) функции преобразования датчика значение погрешности оценивается как γ 1 n , где n – число витков в обмотке, как правило, n 100…200. Указанная погрешность отсутствует у реохордных преобразователей, в которых подвижный контакт перемещается вдоль оси проволоки.
n , где n – число витков в обмотке, как правило, n 100…200. Указанная погрешность отсутствует у реохордных преобразователей, в которых подвижный контакт перемещается вдоль оси проволоки.
Достоинствами реостатных преобразователей являются: высокая точность, возможность получения значительного по уровню выходного сигнала и сравнительная простота конструкции.
К недостаткам преобразователей относятся скользящие контакты, необходимость относительно больших перемещений движка, наличие в некоторых случаях значительного усилия для его перемещения. На точность преобразования может оказывать влияние и температурная погрешность за счет изменения удельного сопротивления провода обмотки при изменении температуры окружающей среды. Однако использование потенциометрической схемы включения датчика позволяет скомпенсировать влияние температуры.
Примеры использования реостатных преобразователей: реостатный уровнемер, который применяется в бензобаках для определения количества топлива (движок преобразователя связан с поплавком в баке); пружинный акселерометр – датчик ускорения, использующийся для измерения виброускорений и виброперемещений.
Тензочувствительные преобразователи (тензорезисторы). Принцип дей-
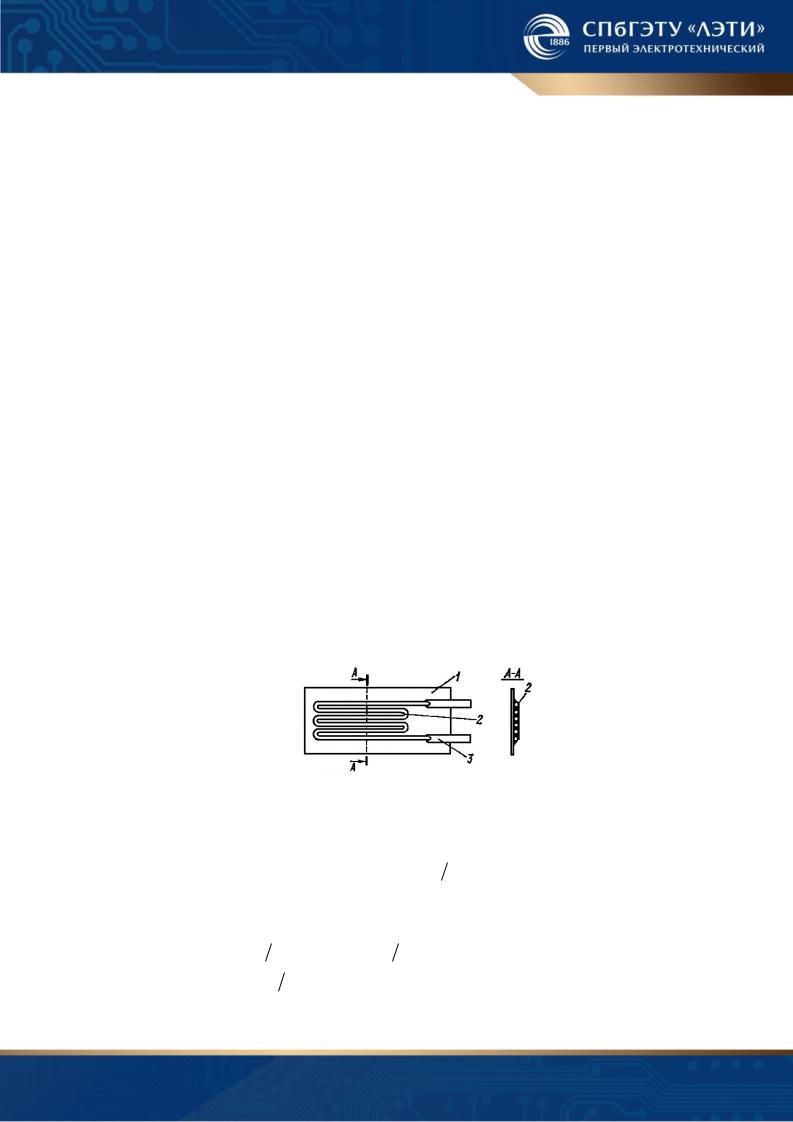
ствия основан на тензоэффекте, заключающемся в изменении активного сопротивления проводника (полупроводника) под действием вызываемого в нем механического напряжения и деформации. На рис. 12.3 показан тензочувствительный проволочный преобразователь, представляющий собой тонкую зигзагообразно уложенную и приклеенную к подложке 1 проволоку 2. Преобразователь включают в цепь с помощью припаиваемых или привариваемых выводов 3. Датчик наклеивают на поверхность детали, деформацию которой исследуют, так, чтобы направление ожидаемой деформации совпадало с продольной осью преобразователя.
Рис.12.3 |
|
|
|
Изменение сопротивления проводника |
R при механическом воздействии |
||
объясняется изменением l его длины l , |
площади поперечного сечения |
Q |
и |
удельного сопротивления ρ , поскольку R ρl Q . |
|
|
|
Характеристикой тензоэффекта материала является коэффициент тензочувствительности (коэффициент относительной чувствительности) S , который
определяется как S ε R εl |
, где ε R R R – относительное изменение сопротив- |
ления проводника, εl l l |
– относительная деформация проводника. |

Для изготовления преобразователя используют проволоку из следующих материалов: константан, нихром, манганин, никель, хромель, висмут, титаноалюминиевый сплав и полупроводники. Основным требованием к материалу является малое значение температурного коэффициента электрического сопротивления, поскольку, как правило, изменение сопротивления преобразователей при исследовании деформации деталей соизмеримо с изменением сопротивления преобразователей при изменении температуры.
Размер преобразователя определяется его назначением. Чаще всего используют преобразователи с длиной продольной оси от 5 до 50 мм с сопротивлением от 30 до 500 Ом. В качестве подложки используют тонкую (0,03…0,05 мм) бумагу, пленку лака или клея, а при высоких температурах слой специального жаростойкого цемента.
Наряду с проводниковыми используются и полупроводниковые тензодат-
чики. Коэффициент тензочувствительности таких преобразователей, выпол-
ненных из полосок полупроводникового материала, обладающих n или p проводимостью, достигает нескольких сотен, однако постоянство коэффициента S , т. е. линейность характеристики преобразования, достигается лишь в узком диапазоне измеряемых значений. К тому же полупроводниковые тензодатчики обладают плохой воспроизводимостью характеристик. В настоящее время выпускаются интегральные полупроводникоые тензорезисторы, образующие мост или полумост с использованием элементов термокомпенсации.
Для металлов коэффициент тензочувствительности определяется, в основном, изменением геометрических размеров датчика, а для полупроводников – пьезорезистивным эффектом. Преимущество полупроводниковых тензодатчиков – более высокая чувствительность к деформации, недостаток – высокая чувствительность к изменению температуры.
Конструктивная особенность тензодатчика такова, что, будучи размещенным (наклеенным) на детали, его уже невозможно переместить и использовать повторно. Поэтому, для определения характеристик преобразования выполняют выборочную градуировку нескольких датчиков и распространяют полученные значения на всю партию выпущенных преобразователей. Невозможность градуировки непосредственно рабочего преобразователя приводит к появлению погрешности от неидентичности преобразователей и различного качества наклейки рабочего и градуируемого преобразователей на уровне 3...5%.
Достоинства тензопреобразователей заключаются в линейности статической характеристики преобразования, простоте конструкции, малых габаритах и массе.

Недостатками таких преобразователей являются малая чувствительность и заметная температурная зависимость выходного сигнала при саморазогреве.
Вкачестве измерительных цепей для тензодатчиков используются мосты, работающие в равновесном и неравновесном режимах. Приборы на основе тензочувствительных преобразователей позволяют измерять механические деформации, давление, усилия, крутящего момента и т. п.
Термочувствительные преобразователи (терморезисторы). Принцип действия преобразователей основан на зависимости электрического сопротивления проводников и полупроводников от температуры.
Впроцессе измерения между преобразователем и средой происходит теплообмен. Следовательно, поскольку сопротивление датчика зависит от температуры, то терморезистор может быть использован для измерения неэлектрических величин, характеризующих газовую или жидкую среды. При разработке преобразователя конструкцию его стараются сделать такой, чтобы он был чувствителен только к измеряемой неэлектрической физической величине, т. е. теплообмен датчика и среды определялся именно этим параметром.
По режиму работы терморезисторы разделяют на преобразователи без преднамеренного перегрева и перегревные. В преобразователях без перегрева ток, протекающий через датчик, практически не приводит к его саморазогреву. Таким образом, температура датчика, а, следовательно, и его сопротивление определяется температурой окружающей среды. Терморезисторы данной группы используются для измерения температуры в газовой и жидкой среде. В перегревных преобразователях ток вызывает перегрев датчика, причем, температура этого перегрева зависит от свойств среды. Эти терморезисторы применяются для измерения скорости, плотности, состава среды и т. д.
Для измерения температуры наиболее распространены терморезисторы или термопреобразователи сопротивления, выполненные из платиновой или медной проволоки. Например, термопреобразователи сопротивления медные (ТСМ) градуировок 50М и 100М, платиновые (ТСП) градуировок 50П и 100П. Цифры обозначают сопротивление чувствительного элемента при 0°С (50 Ом, 100 Ом), а буквы М и П – материал чувствительного элемента. Стандартные платиновые терморезисторы применяются для измерения температуры в диапазоне –
260…+1100°С, медные – в диапазоне –200…+200°С.
На рис. 12.4 приведено устройство платинового термопреобразователя.

Платиновая неизолированная проволока 1 диаметром |
|
0,05…0,07 мм, намотана (бифилярным способом) на каркас 2, вы- |
|
полненный из термостойкого изоляционного материала (фарфор, |
|
слюда, кварц), к концам которой припаяны выводы из серебряной |
|
проволоки 3. Обмотка с каркасом помещается между слюдяными |
|
прокладками, и все вместе размещается в тонкостенной алюми- |
|
ниевой трубке. Для защиты чувствительного элемента от механи- |
|
ческих и химических воздействий внешней среды его помещают |
|
в защитную арматуру из нержавеющей стали. |
Рис. 12.4 |
В некоторых датчиках, рассчитанных на измерение температур до 100°С серебряные выводы заменены медными. Однако при высоких температурах медь с платиной в месте спая образуют термопару, термоЭДС которой вносит погрешность в результат измерения. Выводы изолируются от арматуры фарфоровыми бусинками и подключаются к зажимам специальной платы, установленной в защитном чехле.
Для каждого термометра сопротивления существует градуировочная таб-
лица, в которой приведена статическая характеристика преобразования. Ана-
литически функцию преобразования ТСП можно описать выражениями:
Rt R0 |
1 At Bt |
2 |
Ct |
3 |
t 100 для диапазона 200 C t 0 C ; |
|
|
||||
Rt R0 |
1 At Bt |
2 |
для диапазона 0 C t 650 C, |
||
|
|||||
где
Rt
– сопротивление датчика при температуре
t
; R0
– сопротивление при 0°С;
коэффициенты: |
A 3,968 10 |
3 |
K |
1 |
, B 5,847 10 |
7 |
K |
|
|
|
|
||||||
Для медного термопреобразователя |
Rt R0 1 |
|||||||
2 |
, |
C 4,22 10 |
12 |
|
|
||
α t |
при 50 C t |
||
K |
4 |
. |
|
180 C ,
где коэффициент α 4,26 10 3 K 1 .
Для построения термочувствительных преобразователей применяют также полупроводниковые элементы –термисторы, термодиоды и термотранзисторы.
Термисторы характеризуются большей чувствительностью, при 20°С их температурный коэффициент в 10…15 раз превышает температурный коэффициент меди и платины и имеют более высокие значения сопротивлений (около 1 МОм). Недостатками термисторов являются плохая воспроизводимость и нели-
нейность характеристики преобразования:
Rt R0 exp B 1 t 1
t 1 t0 ,
t0 ,
где Rt и R0 – сопротивления термистора при измеряемой температуре t и началь-

ной температуре рабочего диапазона t0 |
соответственно; B – коэффициент, зави- |
сящий от свойств полупроводника. |
|
Термисторы используются для |
измерения температур в диапазоне – |
60 +120°С. |
|
Термодиоды и термотранзисторы, у которых изменяется сопротивление p n -перехода и падение напряжения на этом переходе под действием температуры используются для работы в диапазоне температур –80°С до +150°С. Чувствительность термотранзистора по напряжению 1,5…2,0 мВ/К, что значительно превышает чувствительность стандартных термопар, рассматриваемых далее. К достоинствам термодиодов и термотранзисторов относятся: высокая чувствительность, малая тепловая инерционность, малые размеры, высокая надежность и низкая стоимость. К недостаткам – плохая воспроизводимость статической характеристики и узкий диапазон измеряемых температур.
Динамические свойства термочувствительных преобразователей характеризуют тепловой инерционностью, определяемой показателем тепловой инерции ε . Эти преобразователи по значениям ε подразделяются на малоинерционные (до 9 с), среднеинерционные (10…80 с) и высокоинерционные (до 4 мин).
Измерительные цепи, в которые включаются термометры сопротивления, используют равновесные и неравновесные мостовые схемы, работающие в режиме ручного или автоматического уравновешивания. Широкое распространение получили мостовые схемы, где в качестве измерителя используется логометр, шкала которого проградуирована в градусах.
Терморезисторы также применяют в приборах для измерения степени разреженности газов – вакуумметрах. В основе этих приборов лежит свойство зависимости теплопроводности сильно разреженных газов от степени разрежения. Терморезисторы используют также в термоанемометрах – приборах для измерения скорости газового потока.
Индуктивные преобразователи. Принцип действия преобразователей основан на зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе от положения, геометрических размеров и магнитного состояния элементов магнитной цепи.
На рис. 12.5 представлена конструкция простейшего индуктивного преобразователя, где 1 – подвижный сердечник (якорь), 2 – неподвижный сердечник, 3 – немагнитная металлическая пластина, 1 и 2 – число витков первой и второй обмотки.
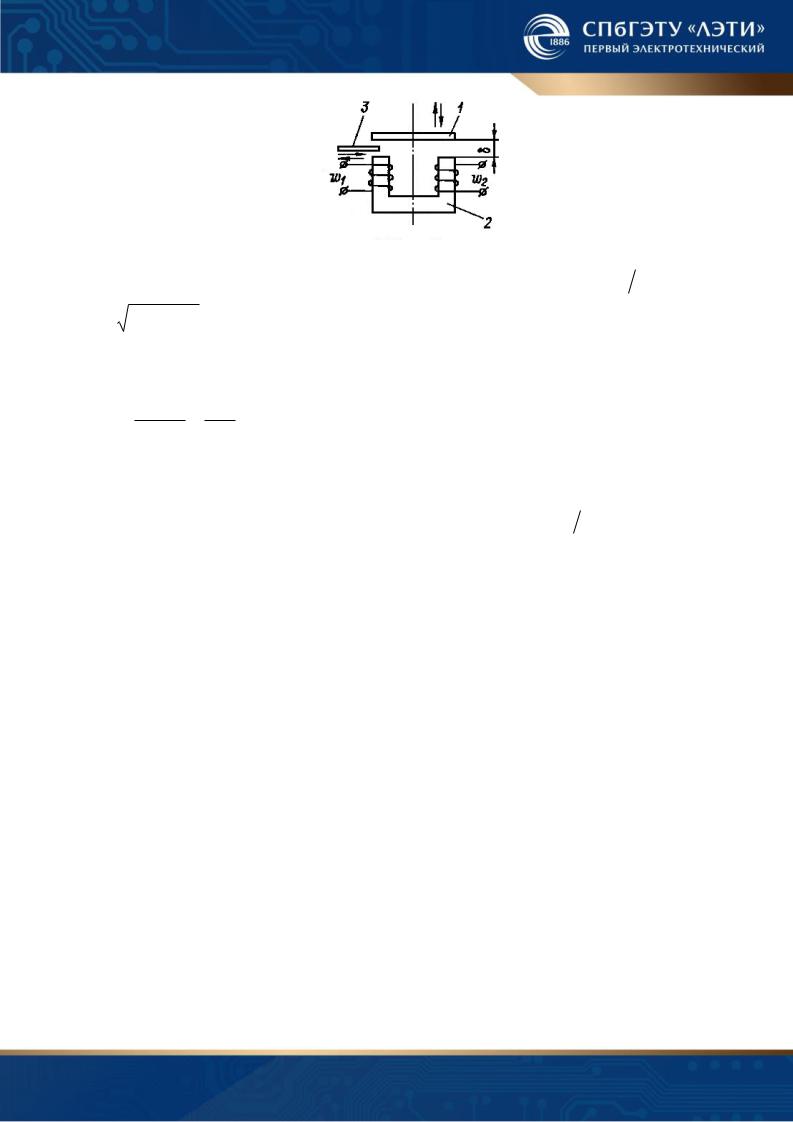
Рис. 12.5
Индуктивность обмотки |
на магнитопроводе |
2 |
Zm , где |
|||
Li i |
||||||
Zm |
2 |
2 |
– магнитное сопротивление магнитопровода. В данном выраже- |
|||
Rm X m |
||||||
нии Rm и |
X m активная и реактивная составляющие магнитного сопротивления. В |
|||||
свою |
очередь |
активная |
составляющая определяется зависимостью |
|||
n |
|
l |
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
||
Rm |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
μ |
μ |
i |
s |
i |
μ |
0 |
s |
|
|
0 |
|
|
|
|
|
|||
, где
μi
,
li
,
s |
i |
|
– относительная магнитная проницаемость,
длина и площади поперечного сечения i – го участка магнитопровода, μ 0 – магнитная постоянная, δ – длина воздушного зазора, s – площадь поперечного сече-
ния воздушного участка магнитопровода; реактивная – |
X m P ωФ |
2 |
, где P |
– по- |
|
тери мощности в магнитопроводе, обусловленные вихревыми токами и гистерезисом, ω – угловая частота, Ф – магнитный поток в магнитопроводе. Взаимная индуктивность двух обмоток определяется из выражения M 1 2  Z m .
Z m .
Приведенные соотношения показывают, что индуктивность и взаимную индуктивность можно изменять, путем изменения величины δ , сечения воздушного зазора s , воздействия на потери мощности в магнитопроводе. Таким образом, с помощью индуктивных преобразователей можно измерять различные неэлектрические величины, которые могут оказывать однозначное влияние на те или иные параметры магнитной системы. Например, используя перемещение магнитного сердечника в направлении, показанном на рисунке стрелками, можно использовать преобразователь для измерения перемещения или давления.
Варианты конструкций индуктивных преобразователей определяются диапазоном измеряемого перемещения и мощностью выходного сигнала.
В качестве измерительных цепей с индуктивными преобразователями чаще всего используются мостовые (равновесные и неравновесные) схемы, а также компенсационные (в автоматических приборах) схемы для дифференциальных трансформаторных преобразователей.