

Билет № 22
-
Контрольная линия положения, ее выбор, примеры, оценка точности.
Контрольная изолиния, или линия положения (КЛП), служит для оперативного контроля момента выхода судна в точку начала поворота путем измерения (контроля) только одного навигационного параметра (рис. 18.8). КЛП выбирают таким образом, чтобы:
выбранный ориентир заблаговременно обнаруживался, надежно опознавался и мог непрерывно наблюдаться в процессе поворота; направление КЛП было возможно ближе к направлению пути после поворота (τклп > ПУ2); одни и те же метод и ориентир использовались бы (по возможности) и для контроля поворота, и в качестве ведущей изолинии после завершения поворота;

контролировать тот навигационный параметр, который по мере подхода судна к повороту изменяется быстрее (например, дистанцию до ориентира на острых носовых или кормовых курсовых углах либо пеленг ориентира вблизи траверза; КЛП обеспечивала необходимые быстроту, точность, надежность и однозначность контроля начала поворота.
При выполнении предварительной прокладки на карте намечают точки начала и конца поворота на новый курс. В точку начала поворота (точку подачи команды на руль) проводится КЛП от выбранного ориентира, рассчитывается (снимается с карты) и надписывается значение контрольного навигационного параметра. Учитывая важность операции поворота, дополнительно на подходе пред вычисляют время и отсчет лага (Тп/ОЛп) на момент начала поворота. Предусматриваются также возможность контролировать боковое смещение с ЛЗП перед подходом к повороту и обязательное определение места судна (обсервация) после завершения поворота.
При подходе к повороту контролируют 4 параметра - ИП к, DK , Tп, ОЛп, причем в ситуации рис. 18.8 основным параметром будет ИП к = 126°. При этом совпадение дистанции с расчетной укажет то, что судно перед поворотом находится на ЛЗП, а совпадение Тп/ОЛп с расчетными - на отсутствие промаха (в том числе в опознании контрольного ориентира).
Точность определения момента выхода в точку начала поворота зависит от СКП КЛП, а также от возможного смешения судна с ЛЗП (Δ1) перед поворотом (рис. 18.9). Так, при Δ1 =const боковое смешение судна с ЛЗП после поворота (Δ2) зависит от выбора контрольного ориентира: (Δ2)А > (Δ2)В > (Δ2)С,причем если поворот выполняется на пеленге ориентира С, одновременно являющемся ведущим для ПУ2 , то при любом Δ1 получим (Δ2)С → 0.
Аналогичный эффект можно получить, используя принцип параллельного пеленга: проложить от ориентира А контрольный пеленг ИПк = ПУ2 = 94°, снять расстояние Sn от этой линии до поворота и рассчитать tп, РОЛп. Тогда, зафиксировав Т0/ОЛ0 в момент пересечения контрольного пеленга, поворот выполняют лишь по времени и по отсчету лага: Тп = Т0 + tп; ОЛ п = ОЛ0 + РОЛп
Однако необходимо учитывать, что чем больше tп, тем больше погрешности предвычисления Ти / ОЛп, особенно при плавании в условиях ветра и течения.
-
Принцип действия гиротохометра.
Гиротахометром (ГТ) называется гироскопический прибор, предназначенный для измерения угловой скорости поворота объекта, на котором он установлен. Довольно часто по отношению к прибору указанного назначения применяют и такие термины, как «дифференцирующий гироскоп», «датчик угловой скорости».
В соответствии с рекомендацией ИМО все суда валовой вместимостью 100 тыс. т и более должны быть обязательно снабжены измерителем угловой скорости поворота. В настоящее время наибольшее распространение для целей судовождения получили ГТ, в которых используется астатический гироскоп с двумя степенями свободы.
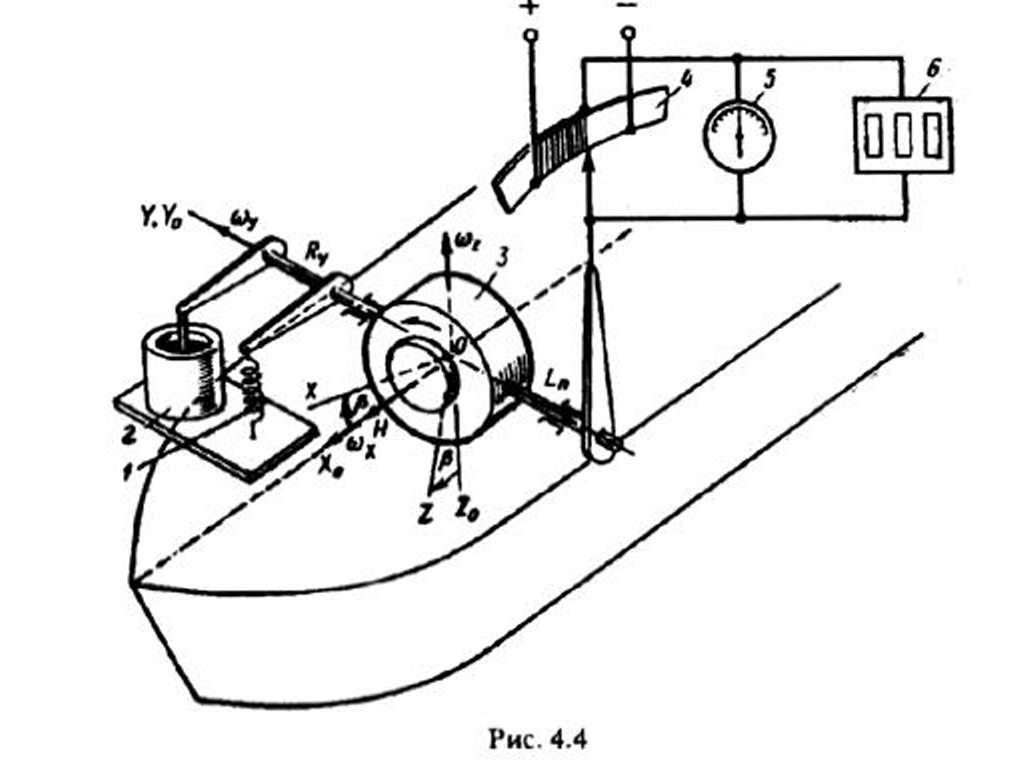
Модель ГТ, построенного на двухстепенном гироскопе с механическими элементами, обеспечивающими наложение на него восстанавливающего и демпфирующего моментов, изображена на рис.4.4. На этом рисунке показаны: гирокамера 3 с быстровращающимся ротором внутри нее; упругий элемент / (механическая пружина), создающий восстанавливающий момент по углу fi; демпфирующее устройство 2 (жидкостный или воздушный поршень), обеспечивающее погашение собственных колебаний гироскопа; преобразователь 4 механического движения (угла поворота гироскопар) в электрический сигнал, выполненный в виде переменного потенциометра; индикатор измеряемой угловой скорости аналогового 5 (в данном случае вольтметр) или цифрового 6 типа (возможна и одновременная установка индикаторов обоих вариантов). При ориентации гироскопа, представленной на рис.4.4, ГТ поставлен на судно в целях измерения его угловой скорости по углу рыскания. Нетрудно себе представить, что при другой ориентации он может измерять угловую скорость бортовой или килевой качки.
Принцип действия ГТ можно пояснить следующим образом. При появлении угловой скорости ωz (см. рис.4.4) поворота объекта по углу рыскания возникает гироскопический момент. Вектор этого гироскопического момента направлен по оси OY и для малых углов β имеет значение Ry = Hωz. Указанный момент будет поворачивать гироскоп до тех пор, пока действие момента Ry не будет уравновешено моментом сил упругости пружины Ln = Сβ (где С — коэффициент, характеризующий жесткость пружины). В итоге угол поворота главной оси гироскопа будет пропорционален угловой скорости поворота основания, так как из равенства Ry = Ln или Hωz = Сβ вытекает, что
Следует особо отмстить, что по принципу действия ГТ измеряет абсолютную угловую скорость, и здесь (а также и в дальнейшем) не учитываются угловые скорости суточного вращения Земли и вращения объекта вокруг Земли лишь по той причине, что они либо находятся за порогом его чувствительности, либо входят в погрешность измерения, либо их действие компенсируется с помощью датчика момента по соответствующей информации. В целях выявления основных характеристик ГТ перейдем к составлению дифференциального уравнения его движения. Пусть ОХ0 Y0 Z0 (рис.4.5) — система координат, неизменно связанная ссудном, причем ось ОХ0 направлена вдоль продольной оси судна, ось ОY0 — вдоль поперечной, ось OZ0 перпендикулярна палубе судна.
Система координат OX YZ связана с гирокамерой (система осей Резаля).
В общем случае движения судна на волнении существуют угловые скорости относительно всех его трех осей ωx, ωy, ωz, связанные следуюшими известными из теории качки судна соотношениями с угловыми скоростями и углами рыскания бортовой и килевой качки:



где
 —
соответственно углы рыскания, бортовой
и килевой качки.
—
соответственно углы рыскания, бортовой
и килевой качки.
Необходимо подчеркнуть, что, например, угловая скорость ωz, для измерения которой предназначен размещенный на судне ГТ (см.рис.4.4), будет в точности определять угловую скорость рыскания только при отсутствии у судна бортовой и килевой качки. Вышеизложенное вытекает из определения угла рыскания, которым называется угол, лежащий в горизонтальной плоскости и отсчитываемый от линии заданного судну курса до проекции продольной оси судна на плоскость горизонта. В общем же случае, измеряя угловую скорость ωz , мы узнаем угловую скорость судна относительно оси, перпендикулярной палубе судна. В случае качки судна эта скорость не равняется в точности угловой скорости рыскания. По этой причине, строго говоря, для определения угловой скорости рыскания необходимо ГТ установить на стабилизированную в плоскости горизонта платформу, как это сделано, например, в судовом измерительном комплексе ИКС-11. Однако установка ГТ на стабилизированную платформу связана со значительным увеличением сложности и стоимости прибора, и потому обычно ГТ устанавливают непосредственно на палубе судна.
При составлении уравнения движения ГТ по способу проф. Б.И.Кудревича будем учитывать (см.рис.4.5):
а)
инерционный момент Jy( +ωy),
где
Jy
—
момент инерции всех частей ГТ, участвующих
в движении вокруг оси ОY
(или OY0);
+ωy),
где
Jy
—
момент инерции всех частей ГТ, участвующих
в движении вокруг оси ОY
(или OY0);
 — относительное ускорение; ωy
— переносное ускорение;
— относительное ускорение; ωy
— переносное ускорение;
б) момент сил упругости Сβ, где С — коэффициент момента силы упругости пружины;

г)
гироскопические моменты
 и
и

д)
момент сил сухого трения в опорах подвеса
камеры гироскопа
 ,
где
,
где
 -значение
момента сил трения;
-значение
момента сил трения;
Суммируя моменты и приравнивая полученную сумму нулю, получим дифференциальное уравнение движения чувствительного элемента одногироскопного ГТ:
 (4.38)
(4.38)
Отметим, что в полученном уравнении остались неучтенными некоторые, обычно весьма малые, моменты от тяжения токоподводов, от неидеальной сбалансированности и т.п.
Представим уравнение (4.38) в следующем виде:

Из
этого уравнения следует, что выходной
сигнал прибора, характеризуемый
углом β, будет зависеть не только от
угловой скорости подлежащей измерению,
но и от угловой скорости ωх,
а также от углового ускорения ωу.
Уменьшение влияния бортовой качки,
определяемой угловой скоростью ωх,
может быть частично обеспечено
конструктивным путем, а именно,
применением более жесткой пружины, что
уменьшает значение угла β. Слагаемое
 определяемое килевой качкой судна,
при малой качке будет невелико по
сравнению с основным слагаемым
определяемое килевой качкой судна,
при малой качке будет невелико по
сравнению с основным слагаемым
 .
.
Если не учитывать моменты, вызывающие помехи в показаниях гиротахометра, и считать угол β малым, то уравнение (4.39) примет следующий вид:

Из
правой части полученного уравнения
следует, что если угловая скорость
 настолько мала, что гироскопический
момент
настолько мала, что гироскопический
момент
 меньше
момента сил сухого трения
меньше
момента сил сухого трения
 ,
то никакого движения гироскопа по углу
β не возникает. Отсюда вытекает
неравенство:
,
то никакого движения гироскопа по углу
β не возникает. Отсюда вытекает
неравенство:
характеризующее минимальное значение угловой скорости, которое может быть измерено с помощью ГТ.
Частное решение уравнения, характеризующее положение равновесия гироскопа для случая, когда измеряемая угловая скорость постоянна по значению, определяется выражением:
Однородное уравнение имеет вид:
 (4.45)
(4.45)
Общее решение такого уравнения известно:
 )
(4.46)
)
(4.46)
Где с1 и с2 – произвольные постоянного интегрирования;
 -
частота затухающих колебаний ГТ равная
-
частота затухающих колебаний ГТ равная

Полное решение уравнения получим:


Выражение
(4.52) характеризует реакцию гироскопа
на приложенную к нему постоянную
угловую скорость
 совершив затухающие колебания, гироскоп
придет в установившееся положение
совершив затухающие колебания, гироскоп
придет в установившееся положение

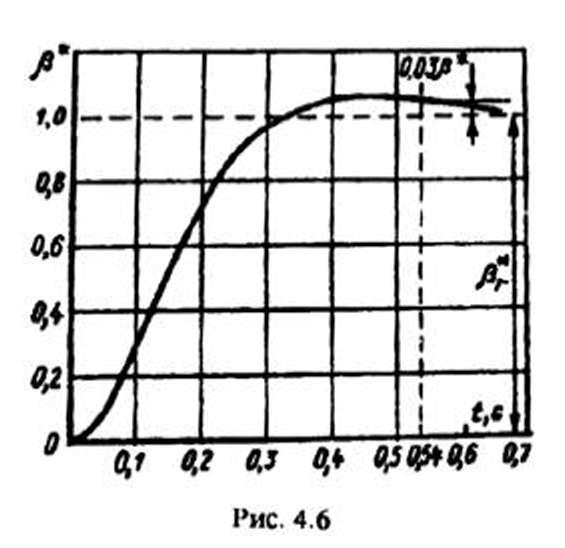
Важным
показателем качества ГТ является
длительность его переходного процесса.
Указанная характеристика определяется
временем, спустя которое отклонение
гироскопа при действии постоянной
угловой скорости
 будет отличаться от его равновесного
положения на значение, не превышающее
заданное (m
%).
будет отличаться от его равновесного
положения на значение, не превышающее
заданное (m
%).
Указанный
график (рис.4.6) для простоты построен
в относительных единицах,
т.е. принято,
что

Существенными недостатками ГТ с механической пружиной являются нестабильность его показаний во времени, недостаточная линейность выходной характеристики и сравнительно узкий диапазон измеряемых угловых скоростей.