

Билет № 14
-
Методы навигации при плавании по установленным путям, в районах регулирования движения судов и срд. Обязанности действия впкм при плавании в стесненных водах, срд, зонах действия судс.
Методы навигации при плавании по установленным путям, в районах регулирования движения судов и СРД.
При плавании в районах регулирования движения судов.
Плавание судов на подходах к портам и в портовых входах часто осуществляется на предельно малых глубинах, при малых отношениях сечения канала к площади мидель-шпангоута судна, на малых скоростях, при которых в наибольшей степени сказывается снос от ветра и течения, ухудшается управляемость судна.
Как правило, подходы к портам и портовые акватории находятся во внутренних или территориальных водах, где установлены местные правила плавания, имеется лоцманское обслуживание, а в крупных портах - БРЛС, посты регулирования движения судов (ПРДС) или системы управления движением судов (СУДС).
Различают радиолокационный контроль, радиолокационную проводку судов, регулирование движения судов, управление движением судов в контролируемом районе. Радиолокационный контроль - это постоянный систематический обзор рабочей зоны PЛC с целью заблаговременного обнаружения возникновения опасной ситуации (сближение контролируемого судна с опасностью, сближение контролируемых судов между собой, появление судна, нарушающего правила, и др.) и своевременного предупреждения ее развития в нежелательном направлении.
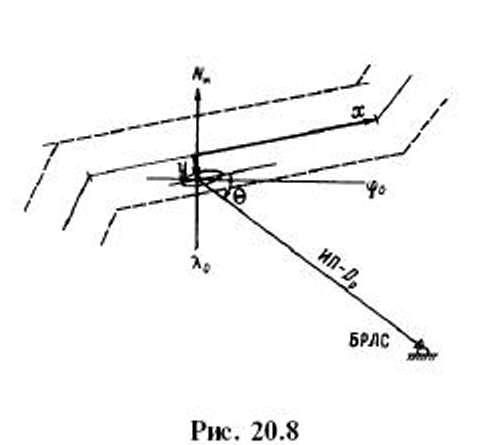
Радиолокационная проводка - это инструментальное (с помощью БРЛС) определение текущих координат судна (маршрутных или полярных) и передача их на судно с необходимой частотой. Полярные координаты - это пеленг и дистанция судна (ИП -Dp) относительно БРЛС либо относительно оговоренного навигационного ориентира (мыса, маяка, входного мола порта и др.), по которым текущее место судна наносится судоводителем на навигационную карту (рис. 20.8). СКП определения текущего места судна можно вывести с помощью формул

где
Мр - СКП определения места судна по БРЛС;
 ,
,
 – СКП измерения радиолокационной
дистанции, ко, и радиолокационного
пеленга, град, по БРЛС, зависящие от
точностных характеристик станций и
тщательности измерений лоцмана-оператора
БРЛС, для современных автоматизированных
БРЛС
– СКП измерения радиолокационной
дистанции, ко, и радиолокационного
пеленга, град, по БРЛС, зависящие от
точностных характеристик станций и
тщательности измерений лоцмана-оператора
БРЛС, для современных автоматизированных
БРЛС
 =
±0,1...
0,2кб;
=
±0,1...
0,2кб;
 =±0,25° (20.23)
=±0,25° (20.23)
Dp
- дистанция от БРЛС до судна;
Dop
- дистанция от БРЛС (либо оговоренного
ориентира) до судна, откладываемая
судоводителем; ,
,
 - СКП
прокладки судоводителем указанных
лоцманом-оператором БРЛС дистанции и
пеленга на навигационной карте, зависящие
от масштаба карты и тщательности
прокладки на карте; МШТ - СКП нанесения
точки судоводителем (штурманом) на карту
по данным БРЛС; V – скорость судна;
- СКП
прокладки судоводителем указанных
лоцманом-оператором БРЛС дистанции и
пеленга на навигационной карте, зависящие
от масштаба карты и тщательности
прокладки на карте; МШТ - СКП нанесения
точки судоводителем (штурманом) на карту
по данным БРЛС; V – скорость судна;
 - среднее квадратичное значение разницы
во времени между моментом измерения
БРЛС и моментом, к которому судоводитель
относит нанесенную им на карту точку
на основе полученной с БРЛС.
- среднее квадратичное значение разницы
во времени между моментом измерения
БРЛС и моментом, к которому судоводитель
относит нанесенную им на карту точку
на основе полученной с БРЛС.
Маршрутные координаты - это текущее боковое уклонение судна у от оси канала (фарватера) и расстояние х до ближайшей поворотной точки.
Для судоводителя маршрутные координаты более информативны и оперативны, не требуют прокладки пеленгов и дистанций на карте, поэтому при радиолокационной проводке они используются чаше, чем полярные, хотя при этом на лоцмана-оператора возлагается дополнительная обязанность - определять боковое уклонение судна от ЛЗП. В сложных условиях плавания информация передается обычно 2 раза в минуту, а при большом уклонении судна - вдвое чаще, т.е. каждые 15 с.
Если лоцман-оператор оценивает смещение судна с ЛЗП глазомерно, относительно нанесенной на дисплей БРЛС «электронной линии» оси фарватера, то СКП определения смещения судна с ЛЗП будет равна, м:

где
 - ОКП глазомерного контроля положения
эхо-сигнала относительно «электронной
линии»,
- ОКП глазомерного контроля положения
эхо-сигнала относительно «электронной
линии»,
 =±0,5 мм; С - знаменатель масштаба
радиолокационного изображения при
данном диаметре экрана БРЛС
=±0,5 мм; С - знаменатель масштаба
радиолокационного изображения при
данном диаметре экрана БРЛС
 ,
мм, и установленной шкале дальности
,
мм, и установленной шкале дальности
 , мили.
, мили.
В небольших портах в качестве БРЛС иногда используют обычные судовые РЛС, но точность проводки с их помощью ниже.
Напротив, в портах с протяженными подходами часто применяют цепочки из нескольких дистанционно управляемых автоматизированных БРЛС, информация с которых транслируется по радиорелейным и кабельным линиям связи в единый центр (ЦСУДС), где она отображается на экранах кругового или секторного обзора с нанесенной на них детальной электронной картой контролируемой акватории. Компьютерная вторичная обработка радиолокационной информации повышает ее точность, а наложение этой информации на электронную карту облегчает оператору оценку складывающейся ситуации.
Важно помнить, что в автоматизированных БРЛС обработка информации осуществляется относительно центра эхо-сигнала.
Лоцман-оператор фиксирует на экране уклонение эхо-сигнала относительно «электронной линии» оси фарватера. Но центру эхо-сигнала соответствует, как правило, центр одной из оконечностей судна - носовой или кормовой - в зависимости от ракурса судна и других причин. Так, если БРЛС расположена вблизи оси канала, то эхо-сигнал судна, выходящего из порта, может соответствовать его кормовой оконечности. Однако при больших углах сноса боковое уклонение дальней от БРЛС (т.е. в данном случае носовой) оконечности судна может быть значительно больше, м:
где
 - контролируемое оператором БРЛС боковое
смешение с ЛЗП ближней оконечности
судна;
- контролируемое оператором БРЛС боковое
смешение с ЛЗП ближней оконечности
судна;
 - неконтролируемое оператором боковое
смешение дальней оконечности судна;
- неконтролируемое оператором боковое
смешение дальней оконечности судна;
l - расстояние по диаметральной плоскости между центром отражающей (ближней) оконечности и наиболее удаленной скулой судна; с - угол бокового сноса, град.
Неучет данного эффекта нередко становится причиной касания грунта при радиолокационной проводке судна по узкому открытому фарватеру (например, выходной канал порта Вентспилс).
На основании информации о текущем местоположении судна, передаваемой лоцманом-оператором БР.ПС, судоводители управляют судном, корректируют его курс и/или скорость с учетом складывающейся навигационной обстановки. Такой метод проводки называется пассивным. Активный метод дистанционной радиолокационной проводки предполагает управление всеми маневрами судна лоцманом-оператором ЦСУДС по радиотелефону, этот метод, обеспечивающий высокую точность проводки на прямолинейных каналах, не дает хороших результатов на извилистых фарватерах, так как лоцман-оператор не знает маневренных характеристик и особенностей поворотливости судна, особенно в условиях сильного ветра.
Лоцманская проводка может быть обязательной и необязательной, это определяется правилами плавания либо обязательными постановлениями по портам. Заявка на лоцманское обслуживание подается в установленном порядке.
Судно должно прибыть к точке встречи лоцмана (ТВЛ) в указанное в заявке время и быть полностью подготовленным для безопасной приемки лоцмана. Учитывая, что ТВЛ (лоцманские станции) часто являются узлами повышенной плотности движения судов, характер маневрирования здесь наименее предсказуем, а наблюдение в момент приемки (сдачи) лоцмана может оказаться ослабленным, необходимо принять дополнительные меры по обеспечению навигационной безопасности. Следует также заранее предусмотреть варианты дальнейших действий на случай задержки лоцмана или невозможности его высадки на судно по погодным условиям (лечь в дрейф, развернуться на выход в открытое море, следовать самостоятельно по фарватеру к находящемуся в укрытии лоцманскому боту, согласиться на дистанционную лоцманскую проводку методом лидирования).
Со стороны судна, судоводитель должен применять, при плавании в СУДС, штурманские и лоцманские методы ОМС для того чтобы контролировать безопасное движение судна в данном районе.
При плавании в СРД.
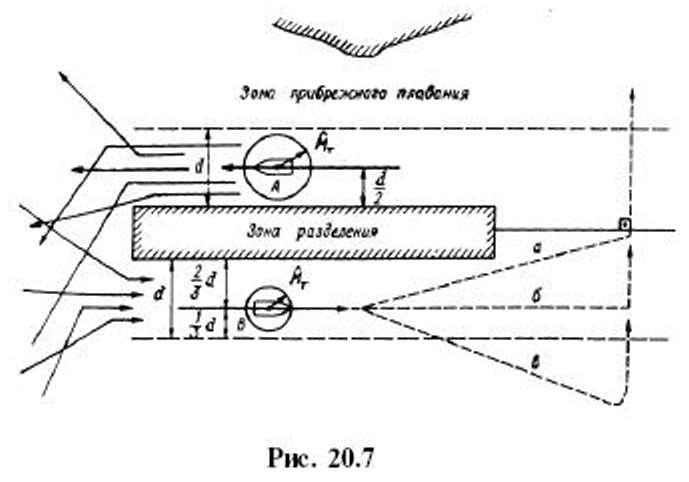
Судно, использующее СРД, должно следовать в соответствующей полосе движения в принятом на ней общем направлении потока движения и держаться, насколько это практически возможно, в стороне от линии (зоны) разделения движения. Учитывая это обстоятельство, при предварительной прокладке путь судна рекомендуется прокладывать то середине полосы движения, если справа по ходу за границей полозы движения находится зона прибрежного плавания или опасный район (рис. 20.7). Если же за правой границей полосы движения опасности нет (нижняя полоса на рис. 20.7), то путь судна лучше располагать в 2/3 ширины полосы движения от зоны разделения. В дальнейшем, при фактическом плавании судна в данном районе, путь судна может быть скорректирован в зависимости от движения других судов в СРД.
Судно, если оно не пересекает СРД, не входит в полосу движения не выходит из нее, не должно, в общем случае, входить в зону разделения или пересекать линию разделения движения, кроме ситуаций крайней необходимости: для избежание непосредственной опасности либо при лове рыбы или гидрографических работах в пределах зоны разделения (не затрудняя при этом движение других судов, следующих в полосе движения).
Судно должно, насколько это практически возможно, избегать пересечения полос движения, но если оно вынуждено пересекать полосу движения, то должно делать это, насколько возможно, курсом под прямым углом к общему направлению потока движения (рис. 20.7, варианты а, б, в).
Существует широко распространенное убеждение о привилегированном статусе судов, использующих СРД для транзитного прохода. Однако в соответствии с Правилом 10(a) плавание по СРД «не освобождает никакое другое судно от его обязанностей, вытекающих из любого другого Правила». Таким образом, при возникновении опасности столкновения Правила маневрирования МППСС-72 имеют приоритет перед Правилом 10.
При плавании в судопотоке оптимальной (с точки зрения минимума обгонов) является скорость судна, равная средней скорости ближайших судов, следующих в той же полосе движения.
Скорость судна, несколько превышающая это значение, более предпочтительна, чем несколько меньшая, так как отводит своему судну активную роль при обгонах, однако в любом случае скорость должна быть безопасной. При ограничении или запрещении обгона скорость судна подбирается такой, чтобы не допустить чрезмерного сближения с судном, идущим впереди.
Минимальную безопасную дистанцию до впереди идущего судна, позволяющую избежать столкновения при экстренном его торможении, можно определить с помощью выражения

где
 - навигационный запас - минимальное
безопасное расстояние до кормы стоящего
впереди судна после торможения своего
судна;
- навигационный запас - минимальное
безопасное расстояние до кормы стоящего
впереди судна после торможения своего
судна;
 =
=
 -
разница тормозных путей своего судна
и цели, в наиболее опасной ситуации
(например, при столкновении или посадке
на мель впереди идущего судна)
-
разница тормозных путей своего судна
и цели, в наиболее опасной ситуации
(например, при столкновении или посадке
на мель впереди идущего судна)
 и
и
 ;
;
 - путь, проходимый
- путь, проходимый
своим судном с постоянной скоростью за время реакции судоводителя (обнаружение торможения впереди идущего судна, анализ сложившейся ситуации, подача команды на реверс).
Важнейшим фактором является своевременное обнаружение торможения впереди идущего судна Порог замечаемого изменения скорости дели может быть принят равным 20...30% от исходной; более надежные результаты дает контроль дистанций по РЛС.
В большинстве случаев безопасной считается дистанция до попутного судна по носу

где L - длина своего судна. Достаточным считается расстояние до судна- попутчика порядка 4...8кб справа, 3...6 ко слева, З...4кб по корме. Следует, однако, иметь в виду, что в теневом секторе близко идущего попутчика может скрываться опасная цель. Особого внимания требуют суда- попутчики, дистанция до которых монотонно уменьшается, а также приближение к повороту СРД.
Учитывая, что точность плавания по СРД зависит от точности применяемых методов контроля за местоположением и движением судна, возможны случаи нарушений и выхода судна на полосу встречного движения. Судно-нарушитель может быть проинформировано о нарушении правил плавания любым другим судном как по радиотелефону, так и по МСС (сигнал YG).
СРД являются эффективными только при условии соблюдения установленных правил всеми судами, поэтому существенным элементом разделения движения судов является жесткий контроль за соблюдением правил со стороны прибрежного государства - с помощью береговых PJ1C (БРЛС), патрульных кораблей, самолетов, вертолетов.
Предусматриваются информация о судах-нарушителях и определенные санкции по отношению к ним. Если обстоятельства вынуждают судно нарушить правила плавания (например, для избежание непосредственной опасности), необходимо немедленно сообщить об этом по радиотелефону на береговую станцию контроля.
Если в СРД предусматривается периодическая подача радиоинформации на береговой центр о местоположении и движении судна, то пометки об этом должны быть сделаны на путевой карте в соответствующих точках, а тексты сообщений подготовлены заранее.
Суда по возможности не должны становиться на якорь в районах СРД или вблизи конечных участков СРД, чтобы не мешать движению судов и не подвергаться опасности столкновения.
Обязанности действия ВПКМ при плавании в стесненных водах, СРД, зонах действия СУДС.
- заблаговременно предупреждает вахтенного механика о возможных реверсах или о переводе СЭУ в маневренный режим;
- по готовности СЭУ делает пробный реверс; сверяет часы на мостике и в машинном отделении; если необходимо, дает указание о закрытии и опломбировании клапанов судовых систем стока за борт;
- переносит счисление пути на карту достаточно крупного масштаба, проверив отметку о ее корректуре; обращает внимание на содержание корректуры по ПРИП и НАВАРЕА, НАВИП; подготавливает навигационные пособия, в том числе содержащие местные правила плавания и информацию о ширине режимных вод;
- включает вторую рулевую машину, если одновременная эксплуатация двух рулевых машин технически возможна;
- проверяет установку пеленгаторов на крыльях мостика, включение УКВ радиостанции; сличает компасы, включает РЛС и эхолот, убирает выдвигаемый датчик лага (если имеется угроза его повреждения);
- проверяет средства звуковой и световой сигнализации, машинный телеграф, связь с машинным отделением;
- подготавливает необходимые флаги, сигнальные огни и знаки, сигнальный прожектор;
определяет место судна;
- делает распечатку на ленте реверсографа и сличает его время с судовым, делает временную отметку на курсограмме;
- контролирует закрытие дверей в водонепроницаемых переборках;
- переходит, если необходимо, на ручное управление рулем; инструктирует и выставляет матроса-наблюдателя; готовит якоря к отдаче, проверяет связь с баком;
- если маршрут проходит через лимитированные для судна глубины, рассчитывает осадку носом и кормой, необходимый запас глубины под килем с учетом крена (в том числе динамического), просадки, волнения и навигационного запаса;
- предупреждает капитана о подходе к указанной им точке;
- по указанию капитана вызывает на мостик подвахтенных судоводителей для усиления вахты;
- следит за оповещениями по УКВ связи о движении судов и навигационными предупреждениями и сам своевременно делает оповещения;
- следит за положением, сигналами, маневрами других судов.
-
Классификация магнитных компасов.
На сегодняшний день разработаны МК для различного типа судов, которые отличаются друг от друга типом чувствительного элемента, точностными характеристиками, компенсаторами его девиации и устройствами отображения информации. Исторически сложилось так. что на морском флоте преимущественное распространение получили МК с подвижным чувствительным элементом (картушкой), которые часто называют стрелочными. Их несомненным достоинством является то, что наличие картушки, самостоятельно устанавливающейся в меридиан, позволяет снимать значение курса судна непосредственно со шкалы этой картушки, что обеспечивает возможность ориентации даже при отсутствии электропитания. Относительная простота конструкции такого МК обеспечивает высокий уровень надежности.
В последнее время на судах стали применять индукционные МК, которые не имеют картушки. Вместо нее используются специальные датчики, измеряющие параметры судового магнитного поля. Эти датчики определенным образом ориентированы относительно диаметральной плоскости судна и неподвижны относительно нее. Названные компасы являются дистанционными, имеют меньшие габариты чувствительного элемента, допускают большую свобод}7 в выборе места их установки. Однако они требуют электропитания и наличия специальных указателей курса, которые называются репитерами.
Современные стрелочные компасы, предназначенные для использования на судах дальнего плавания, также снабжаются устройствами для дистанционной передачи информации. Необходимость таких устройств диктуется внедрением на судах «черных ящиков» и интегрированных навигационных систем. Устройства дистанционной передачи информации могут быть оптическими, электромеханическими или электронными (цифровыми).
Информация о курсе может отображаться как в аналоговом, так и в цифровом виде и, как правило, на нескольких указателях курса (репитерах).
Различают главные и путевые МК. Главный магнитный компас устанавливается на верхнем мостике в диаметральной плоскости судна или, как исключение, вблизи её и может использоваться для пеленгования различных ориентиров. Информация с главного МК может сниматься непосредственно с его картушки или, при наличии системы дистанционной передачи информации, в ходовой рубке. Если главный компас не имеет дистанционной передачи, то в ходовой рубке устанавливается путевой МК. Имеется ряд других признаков, по которым классифицируются магнитные компасы.
