

Билет № 24
-
Методы навигации при плавании в стесненных водах. Обязанности и действия впкм при плавании в портовых водах.
Методы навигации при плавании в стесненных водах.
Контроль за местоположением и движением судна.
В соответствии с требованиями ИМО и МАМС при плавании в стесненных водах необходимы непрерывный контроль за местоположением и движением судна, практически мгновенная обработка навигационной информации; предельные (с Р=0,95) погрешности определения текущего места судна не должны превышать 20% ширины судоходного канала, фарватера, безопасного прохода, а в широких проливах, на подходах к портом и узкостям - 50...200 м.
Счисление пути ведется, как правило, по предварительной прокладке. На реках, акваториях портов, узких и извилистых фарватерах, в иных районах, где маневрирование выполняется с дискретностью менее 5 мин, исполнительная прокладка ведется путем нанесения на карту только обсервованных точек, отметок на предварительной прокладке моментов прохождения (траверзов) береговых и плавучих ориентиров, поворотов с одного колена фарватера на другое с тем, чтобы не потерять ориентировку в навигационной обстановке. Для быстрой ориентировки рекомендуется иметь на мостике справочно-информационную (маршрутно-лоцманскую) карту района с курсами для плавания, ведущими, ограждающими, контрольными параметрами, расчетным временем лежания на курсе и другой необходимой оперативной информацией.
Навигационные определения места судна (обсервации), выполняемые вахтенным помощником капитана, играют в стесненных водах вспомогательную и дублирующую роль. Задача определения места судна сводится в большинстве случаев к установлению величины бокового отклонения судна от ЛЗП и ошибки в пройденном расстоянии. Поэтому при плавании постоянным курсом желательно ток подбирать ориентиры, чтобы большая полуось эллипса ошибок ЭО (мысленно представляемого судоводителем) была направлена вдоль оси фарватера ЭО1 при подходе к повороту - поперек фарватера ЭО2, (рис. 20.13). Для определения места используются, как правило, простейшие визуальные и радиолокационные методы, не требующие больших затрат времени (в том числе комбинированные с использованием ведущей изолинии: створ и дистанция ориентира на острых курсовых углах, створ и секущий пеленг, створ и траверз ориентира и др.).
Для ускорения обсерваций в наиболее сложных районах могут быть заранее построены сетки изолиний.
В стесненных водах наиболее широко применяются ускоренные радиолокационные методы контроля за местоположением и движением судна - в силу своей простоты, точности, оперативности, наглядности, возможности решать одновременно задачи навигации, управления судном, предупреждения столкновений без отрыва от наблюдения за навигационной обстановкой. Наиболее эффективно решение навигационных задач в стесненных водах с использованием механического визира с системой параллельных линий, выносного электронного визира, а также режима электронной карты в САРП.

Кроме того, управляя движением судна в соответствии с предварительной прокладкой, активно используя визуальный пеленгатор, визир и ПКД РЛС, установленные на заранее пред вычисленные отсчеты, судоводитель получает возможность не прокладывать результаты измерений на карте, а лишь отмечать совпадение или расхождение измеренных навигационных параметров с расчетными. Такой «программированный контроль» за местоположением и движением судна в стесненных водах близок в известной степени и к лоцманским методам, и к обсервационному счислению. Необходимо, однако, учитывать ограничения, связанные с особенностями радиолокационного изображения. В хорошую видимость важную роль играют визуальные методы. По оценкам, зрительная система доставляет человеку до 90% всей получаемой им информации. Чем уже канал, чем ближе ориентиры и навигационные опасности, тем более эффективны визуальные методы по сравнению с радиолокационными.
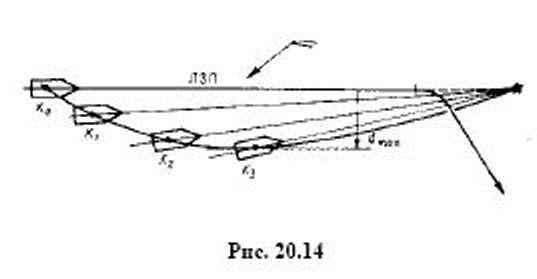
В качестве ведущей, ограждающей, контрольной изолинии эффективно используется визуальный пеленг. Более простым визуальным методом является плавание на ориентир («Держать на маяк!»), когда рулевой все время удерживает продольную ось судна (практически - носовой флагшток) на заданном ориентире. Однако при наличии бокового сноса от ветра и/или течения судно будет двигаться по «кривой погони» (рис. 20.14) и получит одностороннее смещение с ЛЗП, что потенциально опасно.
Лучшим визуальным средством обеспечения плавания судна по прямолинейным фарватерам являются навигационные створы, искусственные или естественные.
При плавании по створам рекомендуется придерживаться определенных принципов, выработанных хорошей морской практикой:
1. При вступлении на входной створ с моря всегда следует взять пеленг створа и сравнить его с данным на карте, чтобы избежать промаха опознавания.
2. Поворот на линию створа следует по возможности производить мористее приемного буя, там, где ширина фарватера еще достаточно большая и ошибку в учете циркуляции судна легко исправить.
3. Выходить на створ рекомендуется под более острым углом.
4. Перед выходом на створ следует ориентировочно оценить поправку на снос и задавать курс рулевому с учетом этой поправки. Выйдя на створ, наблюдают за положением створных знаков и, заметив отклонение судна с оси створа, корректируют курс в ту или иную сторону, т. е. уточняют опытным путем фактическую поправку на снос.
5. При переходе с одного створа на другой необходимо намечать ТПКР с учетом циркуляции судна (в том числе под влиянием ветра и течения), тщательно привязывать ТПКР к береговым ориентирам секущими контрольными изолиниями и внимательно контролировать, как судно вписывается в поворот, увеличивая или уменьшая в случае необходимости угол перекладки руля. Промах в определении ТПКР, в оценке элементов поворотливости судна может повлечь за собой уклонение судна со следующего колена фарватера («проскочить» створ), т.е. сразу же создать опасную ситуацию.
6. Отклоняться с оси створа возможно только в том случае, если прилегающие глубины гарантируют безопасное плавание судна. На выходных каналах нефтепортов танкер в грузу, отклонившийся с оси каната на полосу встречного движения, может сесть на мель даже в пределах фарватера, так как полоса для судов, следующих в балласте, часто углубляется и контролируется менее тщательно, чем «грузовая» полоса.
7. В случае внезапной вынужденной остановки или постановки судна на якорь на створной линии либо вблизи нее капитан обязан выставить соответствующие огни или знаки, включить яркое освещение, подавать соответствующие звуковые сигналы и немедленно оповестить по радиотелефону ЦСУДС (капитана порта) и все суда, следующие по фарватеру.
Использование ПСНО.
При осевой системе ограждения фарватера следует вести судно возможно ближе к линии буев, но так, чтобы они всегда оставались левее курса. Можно вести судно и по линии осевых буев (с тем чтобы их эхо- сигналы на экране РЛС перемешались бы прямо по визирной линии), обходя каждый буй на безопасном расстоянии и вновь возвращаясь на осевую линию. Визуальный контроль может дополняться пеленгованием буев по носу (ГКПН ) и по корме (ГКПК), откуда боковое отклонение судна с оси фарватера, м:

или более точно

где
 - дистанция до буя, мили.
- дистанция до буя, мили.
Если фарватер огражден парными буями, т.е. по латеральной системе, то для следования по оси фарватера достаточно удерживать судно посередине между буями (симметрия расположения эхо-сигналов буев относительно визирной линии). Для следования по правой стороне фарватера необходимо корректировать курс так, чтобы расстояния между линией визира и правыми (по ходу) буями были заметно меньше, чем между визиром и левыми буями. Если судно выходит на линию буев, это означает выход на бровку фарватера Визуальная проводка по прямолинейному фарватеру, огражденному парными буями, аналогична по технологии исполнения плаванию по перспективному створу.
Плавание по буям необходимо совмещать с контролем по береговым ориентирам, со счислением пути судна по предварительной прокладке, отметками (Т/ОЛ) в моменты прохождения буев, уточнением путевой скорости и времени до очередного поворота. Поворот по буям без такого дублирующего контроля опасен.
Расчет и планирование поворота без учета ветра и течения.
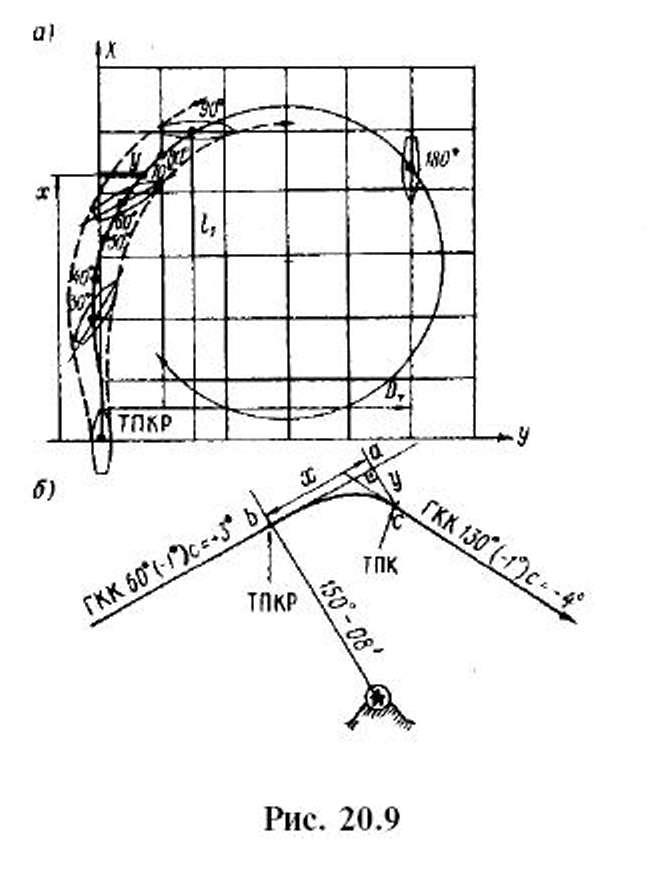
Расчет поворота может быть выполнен способами: приближенным способом двух длин, способом окружности (в том числе с учетом «мертвого промежутка») и др. Однако для крупнотоннажных судов наилучшие результаты дает использование диаграмм циркуляции (рис. 20.9,б), входящих в состав информации о маневренных элементах судна (по форме ИМО). Начальная точка каждой диаграммы циркуляции (Т = 00.00) соответствует ТПКР, т. е. никаких дополнительных поправок на «мертвый промежуток» не требуется. Для более точного планирования поворота рекомендуется нанести на диаграммы положения судна, соответствующие углам отворота Δк = 10, 20, 30, 60° от первоначального курса. Аргументами для входа в диаграмму циркуляции являются загрузка судна (в грузу или в балласте), сторона поворота и угол перекладки руля (выбор диаграммы) и угол отворота судна (угол разворота ДП судна)
Δк = ИК2 – ИК1 = ГКК2 – ГКК1 (20.30)
На диаграмме циркуляции отыскивается точка а, соответствующая углу отворота Δк , и снимаются прямоугольные координаты этой точки, ко, относительно начала координат (ТПКР):
x=ba, y=ca
На навигационной карте поперечное смешение у=са вмещают по перпендикуляру к ЛЗП1 полученная точка с будет концом поворота (ТКП). Отложив от а назад по ЛЗП прямое смешение х = bа, получим ТПКР, которую необходимо «привязать» к береговым ориентирам контрольными пеленгом и дистанцией (ИПК, DK). Кривая циркуляции b-с вписывается от руки, проверяется безопасность прохождения этой кривой с учетом выноса кормы на повороте и полосы, занимаемой судном при криволинейном движении.
Расчет и планирование поворота с учетом ветра и течения.
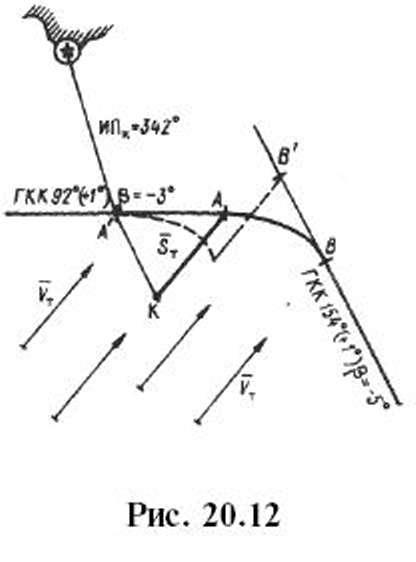
На рис. 20.11 кривая при известных элементах течения ТПКР рассчитывают с учетом сноса судна течением за время tΔк выполнения циркуляции (рис. 20.12):
 (20.31)
(20.31)
Пусть точки А и В - ТПКР и ТКП при отсутствии течения, полученные с помощью диаграммы циркуляции. Величину ST откладывают от точки А навстречу течению и через полученную определяющую точку К проводят прямую, параллельную ПУ, до пересечения с линией ПУ1. Полученная точка А' и будет искомой точкой подачи команды на руль с учетом течения, а расчетная ТКП будет в точке В'. Следует, однако, иметь в виду, что неточное знание элементов течения резко увеличивает погрешность в выполнении рассчитанного поворота, еще более увеличивая «полосу рассеивания» возможных траекторий движения судов. Таким образом, подтверждается вывод о, том, что поворот судна на новый курс выполняется с невысокой точностью. Поэтому и рекомендуется по возможности избегать поворотов вблизи навигационных опасностей и не входить в узкий канал на циркуляции.
Поворот с фиксированной угловой скоростью.
или в град./мин
где
 ,
,
 -
заданный радиус траектории движения
судна при повороте в метрах и милях
соответственно; Vc,
V - линейная скорость судна, м/с и узлы
соответственно.
-
заданный радиус траектории движения
судна при повороте в метрах и милях
соответственно; Vc,
V - линейная скорость судна, м/с и узлы
соответственно.
Влияние течения может быть скомпенсировано коррекцией задаваемой угловой скорости поворота, град/мин:

так как поворот должен быть выполнен за то же время, но на больший (или меньший) угол.
Технология выполнения поворота заключается в следующем. Сняв с карты заданный радиус циркуляции (например, радиус кривизны речного фарватера), судоводитель рассчитывает требуемую угловую скорость поворота. Не доходя примерно одной длины судна до намеченной точки начала поворота, дают команду на перекладку руля и указывают рулевому требуемую угловую скорость поворота. Наблюдая за показаниями указателя угловой скорости поворота (гиротахометра) и самостоятельно корректируя угол перекладки руля, рулевой добивается постоянства угловой скорости

и
тем самым ведет судно по кривой заданного
радиуса. Если рулевой будет выдерживать
 и
периодом рыскания τР
, с, то судно будет следовать по синусоиде
с боковыми отклонениями относительно
заданной траектории, м,
и
периодом рыскания τР
, с, то судно будет следовать по синусоиде
с боковыми отклонениями относительно
заданной траектории, м,
Если к моменту прихода в точку начала поворота направление движения центра масс судна будет отличаться от ПУ1 на величину σк , то даже при выполнении условия (20.35) судно будет постепенно удаляться в сторону от заданной траектории на величину, м,

т.е.
примерно 30 м на каждую милю плавания Sц
при угловой ошибке
 =
1°.
Необходимо учитывать и существенную
(до 30...50% при крутых поворотах) потерю
скорости на циркуляции, принимая при
расчете
=
1°.
Необходимо учитывать и существенную
(до 30...50% при крутых поворотах) потерю
скорости на циркуляции, принимая при
расчете
 среднее значение
V.
В целом способ достаточно прост и
надежен, требуется лишь наличие
гиротахометра и опыт работы с ним.
среднее значение
V.
В целом способ достаточно прост и
надежен, требуется лишь наличие
гиротахометра и опыт работы с ним.
Поворот
по окружности заданного радиуса можно
выполнить и с помощью абсолютного
гидроакустического лага с носовой и
кормовой станциями, разнесенными на
расстояние l,
рассчитав заданное значение
 алгебраической разности поперечных
составляющих скорости судна на носовой
алгебраической разности поперечных
составляющих скорости судна на носовой
 и кормовой
и кормовой
 станциях, уз:
станциях, уз:

где
Vх
-
продольная составляющая скорости судна;
V
-
абсолютная путевая скорость судна. Для
следования по окружности необходимо
снимать с лага текущие значения
 ,
,
 ,
мгновенно вычислять их алгебраическую
разность, сравнивать эту величину с
заданной (20.38) и корректировать
соответственно угол перекладки руля.
Способ, однако, сложнее, чем при
использовании гиротахометра. Перед
крутым поворотом рекомендуется
планировать уменьшение скорости с тем,
чтобы к моменту выхода в ТПКР
погасить инерцию судна. Выйдя в ТПКР,на
короткое время увеличивают частоту
вращения винта дня улучшения управляемости
(метод толчка).
,
мгновенно вычислять их алгебраическую
разность, сравнивать эту величину с
заданной (20.38) и корректировать
соответственно угол перекладки руля.
Способ, однако, сложнее, чем при
использовании гиротахометра. Перед
крутым поворотом рекомендуется
планировать уменьшение скорости с тем,
чтобы к моменту выхода в ТПКР
погасить инерцию судна. Выйдя в ТПКР,на
короткое время увеличивают частоту
вращения винта дня улучшения управляемости
(метод толчка).
Обязанности и действия ВПКМ при плавании в портовых водах.
- получают прогноз погоды;
- заблаговременно выполняют расчеты по приливам;
- подготавливают документы на приход;
- устанавливают связь со службой контроля за движением судов, лоцманской станцией и сообщают необходимые данные;
- уточняют глубины на подходном канале и у причалов порта, убеждаются в соответствии - осадки судна глубинам с учетом дифферента;
- дают указание вахтенному механику о переводе СЭУ в маневренный режим, сличают часы на мостике и в машинном отделении;
- устанавливают связь с постом СУДС, получают информацию о порядке и очередности движения, скорости, других судах;
- проверяют работу эхолотов, средств сигнализации и связи;
- подготавливают необходимые флаги;
- готовят пеленгаторы на крыльях мостика, сличают компасы;
- проверяют работу РЛС;
- делают отметку на курсограмме и реверсограмме, проверяют работу портативных УКВ радиостанций;
- устанавливают на УКВ радиостанции необходимый канал;
- включают вторую рулевую машину, если совместная работа двух рулевых машин технически возможна; переходят на ручное управление рулем, делают пробный реверс;
- докладывают капитану о выполненных мероприятиях;
- предупреждают судовой экипаж о швартовке, вызывают боцмана на бак, готовят якоря к отдаче, проверяют связь с баком, кормой и машинным отделением.