

Билет № 26
-
Методы навигационного использования рлс, сарп и экс.
Методы навигационного использования РЛС.
Радиолокационная станция применяется главным образом для определения места судна по измеренным расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленга.
Так как изображение берегов на экране только лишь в общих чертах совпадает по своему виду- с их изображением на карте, то при подходе к берегу с моря возникает задача опознавания района нахождения судна, а также объектов, эхо-сигналы которых видны на ИКО и которые затем могут быть использованы для определения места судна.
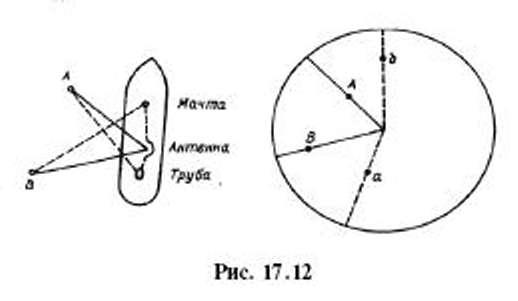
Опознавание береговой черты. Основными признаками для опознавания берега являются конфигурация береговой черты, отдельно лежащие в море скалы, островки и т.п. Для опознавания нужно использовать также все навигационные средства, особенно такие, как измерение глубин и радиопеленгование. Это в значительной степени поможет разобраться в изображении берега на экране. Изображение при этом следует ориентировать относительно меридиана.
Опознавание береговых объектов для последующего определения места судна может производиться несколькими способами.
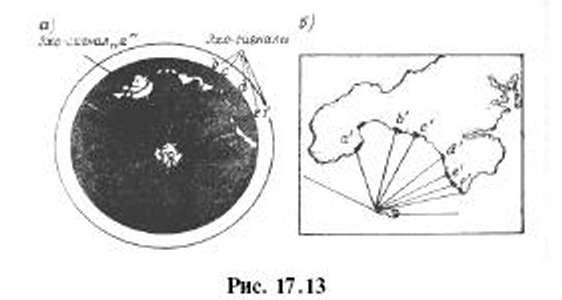
1) Способ веера. Наблюдатель быстро измеряет пеленга и расстояния до характерных объектов а, b, с, d, е, f (рис. 17.13,а). Затем на кальке прокладывает линию пути судна и из любой точки этой линии по измеренным пеленгам и расстояниям в масштабе карты наносит места объектов – a’, b’, c’, d’,e’, f’ (рис. 17.13,6).
Наложив кальку на карту в районе счислимого места, перемещает ее до тех пор, сохраняя параллельность линии пути, пока точки a', b’, c'. d’, f’ не совпадут с характерными объектами на карте. Точка пересечения пеленгов будет приближенным местом судна, а объекты на экране можно считать опознанными. Для большей уверенности наблюдения следует повторить несколько раз, связывая полученные обсервованные точки счислением.
2) Способ траверзных расстояний. Наблюдатель измеряет расстояния до объекта, эхо-сигналы которых видны на экране, когда они приходят на один и тот же КУ, лучше всего на траверз, и в момент измерения расстояний замечает время и отсчет лага.
Затем на листке кальки прокладывает линию курса со счислимыми точками каждого измерения. Из соответствующих точек по КУ и расстоянию наносит объекты. Кальку накладывает на карту и перемешает, как и в первом случае. В результате совпадения объектов наблюдатель получает уточненное положение линии пути и опознанные объекты на экране РЛС.
Определение места судна по расстояниям до нескольких ориентиров.
1. Расстояния измеряются до точечных или имеющих характерные очертания
ориентиров (выступающих мысов и островков небольших размеров). Наблюдатель последовательно измеряет расстояния до нескольких ориентиров с помощью ПКД. При этом ПКД нужно совмещать с той частью изображения, которая больше всего выступает в сторону судна.
Чтобы уменьшить влияние разновременности измерения расстояний на точность определения места судна этим способом, необходимо сначала измерять расстояния до объектов, расположенных на траверзе или около него, а затем до объектов, расположенных на острых КУ, или, если скорость судна значительна, приводить измерения к одному месту. Приведение можно производить графически или с помощью таблиц величины изменения расстояния, например табл. 31МТ-75.
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и точечного (или имеющего характерные очертания) ориентира. Измерения расстояний ничем не отличаются от предыдущего способа. Однако прокладка этих расстояний затруднена, так как на плавной береговой черте невозможно найти точку, до которой производились измерения.
3. Расстояния измеряются до участков береговой черты с плавными очертаниями. В практике часто встречаются случаи, когда на ИКО видны только плавные очертания береговой черты без каких-либо приметных ориентиров, например при входе в проливы, устья рек, широкие каналы и т.п.
В
этом случае рекомендуется измерять
расстояния
 и
и
 до ближайших к судну точек береговой
черты
до ближайших к судну точек береговой
черты
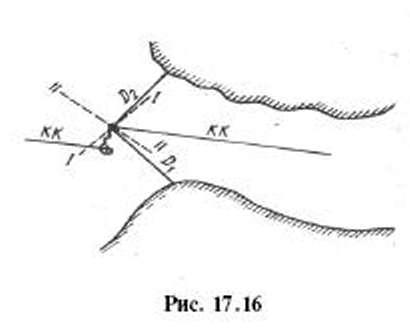
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии проводят дуги окружностей радиусами, равными измеренным расстояниям (в масштабе карты). Дуги проводят примерно в районе тех КУ, на которых были измерены расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку на карте, находят такое ее положение, при котором дуги коснутся обоих участков берега. Положение центра дуг в этот момент и определит место судна. Очевидно, что в случае, когда участки береговой черты параллельны, место судна определить таким способом нельзя.
Если
во время измерения расстояний до участков
береговой черты с плавными очертаниями
одновременно заметить и приближенные
пеленга на точки касания ПКД, то построение
можно выполнить непосредственно на
карте, не пользуясь калькой. Для этого
от наблюдаемых объектов проводят линии
пеленгов и откладывают на них измеренные
расстояния
 и
и
 ..
..
Реальная средняя квадратичная погрешность определения места судна по двум радиолокационным расстояниям может быть рассчитана по формуле
где
 ,
,
 - средние квадратичные погрешности
измерения расстояний.
- средние квадратичные погрешности
измерения расстояний.
Если
точность измерения обоих расстояний
примерно одинакова, т.е.
 (как это часто бывает при измерении до
точечных объектов), то формула (17.11)
примет вид
(как это часто бывает при измерении до
точечных объектов), то формула (17.11)
примет вид

При определении места судна по трем радиолокационным расстояниям погрешность может быть рассчитана по формуле
Определение места судна по радиолокационному пеленгу и расстоянию до одного ориентира. Этот способ применяется, когда на ИКО виден только один хорошо различимый, лучше всего точечный, ориентир и его не видно визуально. Обсервованное место получают на линии пеленга на измеренном расстоянии от объекта. При прокладке линии радиолокационного пеленга не следует забывать исправлять пеленг поправкой ГК.
Средняя квадратичная погрешность в определении места судна данным способом может быть вычислена по формуле

Так как расстояние PЛC измеряется с высокой точностью, то погрешности в определении места судна этим способом зависят, главным образом, от погрешностей радиолокационного пеленга. Кроме названных выше, могут применяться также и комбинированные способы определения места, например по визуальному пеленгу маяка и радиолокационному расстоянию и др.
Учитывая, что главную трудность при радиолокационных наблюдениях составляет точное опознавание объектов, нужно стремиться получить не менее трех линий положения (три расстояния, два расстояния и пеленг и т. д.). Тогда большой треугольник погрешности, заметно не изменяющийся при повторном наблюдении через небольшой промежуток времени, укажет на погрешность в опознавании объектов или на погрешности наблюдений. При определении места судна с помощью РЛС главная задача состоит в том. чтобы узнать, от каких участков берега отразился сигнал. Если это не установлено, то определить место судна нельзя, а можно только сказать, проходит судно чисто от опасности или нет.
Методы навигационного использования САРП.
Средства автоматической радиолокационной прокладки (САРП) предназначаются в основном для предупреждения столкновения судов и облегчения выбора маневра в сложной навигационной обстановке.
В САРП с помощью ЭВМ происходит автоматическая обработка всей (или по выбору штурмана) радиолокационной информации (эхо-сигналов подвижных и неподвижных объектов), и данные о ней в векторной форме показываются на РИС. Это обеспечивает более высокую наглядность ситуации по сравнению с изображением обстановки на ИКО РЛС. Например, маневры других судов индицируются через 1...3мин после их выполнения. Благодаря этому обеспечивается более ранняя и определенная оценка ситуации при расхождении. На РИС можно «проиграть» маневр на расхождение с опасными судами, что позволяет выбрать оптимальное решение задачи.
Длина векторов целей на РИС соответствует в масштабе экрана заданному времени экстраполяции. Изменяя это время, можно изменить и длину векторов и находить точки, в которых окажутся цели через установленное время экстраполяции.
Изображение на РИС может быть ориентировано «по курсу» или «по норду». Движение целей представляется ЛИД или ЛОД. Индикация ЛОД позволяет очень быстро оценить опасность столкновения (ЛОД опасных целей проходят через центр РИС или вблизи него). Индикация ЛИД позволяет легко отличить неподвижные объекты от подвижных (у первых не будет векторов).
Если на отметку любого объекта, видимого на РИС, нанести светящийся маркер, то вычисленные в ЭВМ данные об этой цели будут индицироваться в цифровой форме на специальном индикаторе: дистанция и пеленг, DKP и ТКР, курс и скорость цели. При этом вычисленные параметры являются текущими, т.е. относятся к настоящему моменту времени.
САРП могут быть успешно использованы и для решения ряда навигационных задач. С их помощью можно:
определять место судна по пеленгам и дистанциям неподвижных объектов, получая мгновенно необходимые данные. Это позволяет осуществлять в узкостях непрерывный контроль за движением судна по выбранному пути;
определять DKP до неподвижных объектов (островков, буев, плавмаяков и т.п.), около которых проложен путь судна Непрерывно контролируя DKP, можно заблаговременно изменить курс судна и пройти на заданном безопасном расстоянии от объекта;
определять свой путь и действительную скорость судна, наблюдая неподвижные ориентиры; плавать по изолинии; контролировать поворот на новый курс.
Если на судне не учитывают течение (например, из-за его незнания) и вводят в САРП скорость судна от лага (вручную или автоматически), то символы неподвижных объектов на РИС в режиме ЛИД будут иметь векторы. Наведя маркер на отметку неподвижного объекта, можно по данным о его векторе определить поправку к скорости своего судна и угол сноса. Для этого вектор кажущегося движения неподвижного объекта нужно мысленно разложить на составляющие векторы, один из которых параллелен курсу судна, другой перпендикулярен к нему. Параллельный вектор, взятый с обратным знаком, представляет собой поправку к скорости судна; перпендикулярный вектор, взятый с обратным знаком, указывает направление и скорость сноса.
В ряде моделей САРП. например «Бриз-Е», "Дата Бридж-7», координаты объектов могут быть введены в память ЭВМ с наборного поля. Тогда по результатам измерений будут определяться автоматически полярные координаты (пеленги и расстояния) всех сопровождаемых объектов и рассчитываться по ним 𝝋0 и 𝝀0, т.е. вестись обсервационное счисление. При этом обсервованные координаты судна выводятся практически непрерывно с высокой точностью. При экспериментах с САРП «Бриз-Е» по точечному объекту место получалось с погрешностью 80... 150м (Р=95%) на расстояниях 10...20 миль с дискретностью 1мин. При сопряжении САРП с автопрокладчиком реализуется графическое обсервационное счисление, что позволяет непрерывно контролировать движение судна относительно линии заданного пути и практически избавляет штурмана от ручной прокладки.
В некоторых САРП по текущим географическим координатам рассчитываются маршрутные координаты: дистанция до выбранной точки на заданной линии пути и боковое смещение с этой линии. Маршрутные координаты непосредственно используются для управления движением судна.
Методы навигационного использования ЭКС.
На электронных картах выполняется предварительная электронная прокладка выбранного маршрута предстоящего перехода. Маршрутные точки могут наноситься либо по географическим координатам (широта, долгота), либо, с помощью специального маркера, по пеленгу и дистанции относительно выбранного ориентира. Заданные таким образом маршрутные точки соединяются линиями предварительной прокладки - локсодромиями или ортодромиями, - которые выделяются на экране особым цветом. С целью «подъема» электронной карты в любой точке экрана могут быть нанесены точки, сплошные и прерывистые линии, условные знаки, цифры, буквы.
С учетом характеристик судна и особенностей района плавания устанавливаются и вводятся в ECDIS допустимые значения максимальных отклонений судна от линии заданного пути dMAX, допустимые значения минимальных дистанций сближения с выделенными навигационными опасностями ΔMIN, а также дистанций срабатывания предупредительной сигнализации при подходе к повороту SПОВ (рис. 16.31). В дальнейшем, при плавании на данном участке, пересечение судном любого из этих пределов вызовет срабатывание предупредительной сигнализации.
В процессе выполнения предварительной прокладки можно при необходимости корректировать выбранный маршрут, например добавляя и убирая маршрутные точки либо изменяя их положение. Уже на стадии планирования перехода ECDIS способна выдавать предупредительный сигнал, если электронная линия предварительной прокладки проходит по опасным глубинам либо в недопустимой близости от навигационных опасностей. Выполненная предварительная прокладка заносится в память ECDIS; при этом обычно обеспечивается возможность запоминания большого количества маршрутов (до 99 - 999). Непосредственно на переходе можно наблюдать на экране ECDIS в реальном масштабе времени перемещение специального символа, отображающего собственное судно (например, ромб на рис. 16.31), на фоне электронной карты.
Перемещение судна отображается на основе показаний навигационных датчиков (гирокомпаса, лага, РНС и/или СРНС), поэтому точность текущего места судна зависит от точности этих датчиков:


где
Mo - ошибка исходной обсервации; Mт - СКП
текущего места судна спустя время /
после исходной обсервации; Мс(t)
- СКП счисления за время
t; Sc ~
расстояние, пройденное по счислению
 ;
;
 - СКП учитываемого путевого угла, град,
и пройденного по линии пути расстояния,
%.
- СКП учитываемого путевого угла, град,
и пройденного по линии пути расстояния,
%.

При
непрерывных навигационных обсервациях
(например, по СРНС НАВСТАР или РНС
«Лоран-С») второе слагаемое в формуле
(16.16) обращается в ноль, а совместная
обработка результатов обсерваций и
счисления (режим «обсервационного
счисления») позволяет повысить не только
надежность, но и точность результатов
( <
<
 )
- Система может выдавать предупредительный
сигнал, если точность навигационной
системы недостаточна либо если текущие
координаты судна, полученные по различным
навигационным датчикам, слишком
различаются между собой. Должна быть
также предусмотрена возможность
коррекции текущего счислимого места
судна вручную.
)
- Система может выдавать предупредительный
сигнал, если точность навигационной
системы недостаточна либо если текущие
координаты судна, полученные по различным
навигационным датчикам, слишком
различаются между собой. Должна быть
также предусмотрена возможность
коррекции текущего счислимого места
судна вручную.
Линия пройденного пути (отличающаяся по цвету от линии предварительной прокладки) и графические отметки времени, выводимые на экран с заданной дискретностью либо по запросу судоводителя, должны сохраняться в памяти ECDIS не менее 5 ч и воспроизводиться при необходимости на электронной карте (режим «проигрывания» пройденного маршрута).
Для текущего местоположения судна ECDIS должен рассчитывать и индицировать в буквенно-цифровой форме текущую навигационную информацию, в том числе (см. рис. 16.31): - дату и время (гринвичское или поясное);
географические координаты судна (с обозначением способа место определения);
гирокомпасный курс (GYRO) и скорость по лагу (LOG) либо путь (course made good - CMG) и путевую скорость (speed made good - SMC);
- боковое уклонение судна от линии заданного пути di (cross track error - CTE) с указанием стороны (знака) уклонения;
- дистанцию и пеленг на очередную маршрутную точку (DIST ТО WP, BRG ТО WP) и время плавания до нее (TIME ТО WP);
- географические координаты маркера, который судоводитель может установить в любую точку экрана («+» на рис. 16.31);
- дистанцию и пеленг на маркер (CURSOR RNG, CURSOR BRG). Наблюдая за перемещением отметки собственного судна по экрану
- ECDIS, судоводитель может осуществлять глазомерную проводку судна по линии заданного пути (ЛЗП), опираясь при этом и на объективную цифровую информацию. Замечаемое смешение судна с ЛЗП, м:
где
С - знаменатель масштаба электронной
карты;
 -
глазомерно фиксируемое отклонение
отметки судна от линии предварительной
прокладки на экране
ECDIS,
ММ; Мт - точность текущего места судна,
определяемая по формуле (16.16), м.
-
глазомерно фиксируемое отклонение
отметки судна от линии предварительной
прокладки на экране
ECDIS,
ММ; Мт - точность текущего места судна,
определяемая по формуле (16.16), м.
При надежной и высокоточной навигационной системе ECDIS становится важнейшим техническим средством навигации не только в прибрежном плавании, но и в стесненных водах, так как обеспечивает мгновенный контроль за местоположением и движением судна, прогнозирование развития навигационной ситуации, оперативное планирование и контроль маневров, безошибочность опознавания наблюдаемых навигационных и радиолокационных ориентиров в Единой всемирной системе геодезических координат (WGS-84). В отчетах по экспериментам с ECDIS неизменно указывается, что даже в сложных навигационных условиях судоводители (по мере накопления опыта работы с системой) охотнее пользуются электронными картами, чем бумажными.
Важно, однако, реально оценивать и учитывать технические ограничения ECDIS, в том числе привязку к геодезическим координатам (а не к побережью), зависимость от точности навигационных датчиков и ограничений используемых РНС (СРНС), опасность использования неприемлемого масштаба электронной карты, возможную неполноту информации на электронной карте и т.д. Наконец даже кратковременная неисправность или отказ ECDIS могут привести к полной потере контроля за обстановкой и, как следствие, к навигационной аварии.