

002. ЛЕКЦИИ 1-6 (ОПУТ) (МТП) (курсант) / Лекции / лекция 3 / лекция 3
.docxобщая задача линейного программирования (озлп) и методы ее решения
1. Постановка и математическая модель ОЗЛП
Пусть некоторое предприятие выпускает n видов продукции. При изготовлении этой продукции предприятие использует m видов ресурсов, объемы которых заданы в количествах b1, b2…bm. Также заданы расходы (aij) i-го вида ресурсов (i=1…m) на производство единицы продукции j-го вида (j=1…n). Кроме того известна стоимость единицы продукции - cij.
Необходимо определить объем производства продукции, при котором достигается максимальный доход от реализации, при условии, что вся продукция найдет сбыт.
Для решения задачи, обозначим xj – количество продукции j-то вида, которое необходимо произвести в планируемом периоде.
Известно, что доход
данного предприятия складывается как
сумма произведение объема выпущенной
продукции, (при условии, что она найдет
сбыт), и стоимости единицы данной
продукции (т.е.
 )
)
Тогда целевая функция примет вид:
 или
или

При этом расходы ресурсов на производство продукции aij не должны превышать запасы ресурсов на производство b1, b2…bm,, т.е. что бы удовлетворялись неравенства:
 или
или
Значения x1, x2…xn должны быть неотрицательными, т.к. количество продукции не может быть отрицательным.
Целевая функция и система ограничений составляют математическую модель линейного программирования.
При неравенствах
вида:
 ,
как правило формулируется задача на
минимум, т.е. целевая функция имеет вид:
,
как правило формулируется задача на
минимум, т.е. целевая функция имеет вид:

При нарушении данного соответствия неравенство приводят к нужному виду, изменив знаки при aij и bi на противоположные.
2. Геометрическая интерпретация ОЗЛП и графический способ ее решения
Задачу линейного программирования и численный метод ее решения можно истолковать геометрически. Геометрическое изображение дает ясное представление о ходе решения задачи линейного программирования и приводит к простому графическому способу решения для того случая, когда число неизвестных параметров управления сводится к двум.
Приступая к изложению геометрической интерпретации, прежде всего, необходимо изучить три составляющих, из которых состоит задача линейного программирования: 1) целевую функцию; 2) систему линейных ограничений; 3) требование неотрицательности искомых параметров. С этой целью будим рассматривать геометрические образы, возникающие на координатной плоскости двух переменных. Обычно в этом случае оси координат обозначают буквами x и y, но, имея в виду дальнейшее обобщение на многомерные пространства, будем обозначать оси координат буквами x1 и x2.
Пусть дана задача линейного программирования (например, на максимум):
 ,
(4.1)
,
(4.1)
при ограничениях:
 (4.2)
(4.2)
и при требовании неотрицательности переменных:
 ,
,
 (4.3)
(4.3)
Рассмотрим систему ограничений 4.2 и изобразим ее на плоскости. Данная система ограничений изображается на плоскости некоторой многоугольной областью, которая представляет собой замкнутый многоугольник. Данная многоугольная область всегда является выпуклой, т.е. такой, которая вместе с любыми двумя точками содержит и весь отрезок, их соединяющий (рис. 4.1), а не такой, какая изображена на рисунке 4.2.
Рис. 4.1.
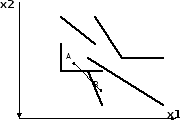
Рис. 4.2.
Каждое линейное
неравенство системы

 можно изобразить на плоскости Ox1x2
некоторой полуплоскостью, которую можно
найти, построив прямую
можно изобразить на плоскости Ox1x2
некоторой полуплоскостью, которую можно
найти, построив прямую
 и подставив в левую часть ее уравнения
координаты какой-нибудь точки, не лежащей
на этой прямой.
и подставив в левую часть ее уравнения
координаты какой-нибудь точки, не лежащей
на этой прямой.
Важно отметить,
что система неравенств:
 ,
выражающих требование неотрицательности
параметров задачи линейного
программирования, изображается первым
квадрантом координатной плоскости
Ox1x2.
,
выражающих требование неотрицательности
параметров задачи линейного
программирования, изображается первым
квадрантом координатной плоскости
Ox1x2.
После изображения
на плоскости системы ограничений,
проведем какую-нибудь определенную
линию уровня Z=const
целевой функции, например прямую
 ,
и покажем стрелками, куда ее надо двигать,
чтобы целевая функция увеличивалась
(см. рис. 4.3).
,
и покажем стрелками, куда ее надо двигать,
чтобы целевая функция увеличивалась
(см. рис. 4.3).
Рис. 4.3.
Для того, что бы
узнать в каком направлении надо
передвигать прямую (l),
достаточно зафиксировать значение
константы в уравнении Z=const.
Тогда
получится какая то определенная прямая
(l),
и, чтобы ответить на поставленный вопрос,
достаточно узнать с какой стороны от
прямой (l),
целевой
функции
 больше фиксированной константы,
поставленной в правую часть уравнения
больше фиксированной константы,
поставленной в правую часть уравнения
 .
Например, целевая функция
.
Например, целевая функция
 увеличивается при движении, показанном
на рисунке 4.4 стрелками около прямой
увеличивается при движении, показанном
на рисунке 4.4 стрелками около прямой
 .
На том же рисунке показано, в какую
сторону увеличивается целевая функция
.
На том же рисунке показано, в какую
сторону увеличивается целевая функция
 .
.

Рис. 4.4.
Очевидно, что мы найдем искомый оптимум, когда прямая (l), двигаясь к границе многоугольника ограничений, покинет этот многоугольник – это произойдет в некоторой вершине многоугольника ограничений. Определив координаты x1B и x2B вершины B, найдем оптимальный план: x1опт=x1B и x2опт=x2B. Вычислив затем значение целевой функции в вершине B, найдем искомый оптимум:

Если бы при тех же ограничениях была поставлена задача на минимум, то линию уровня целевой функции – прямую (l) – надо двигать в противоположную сторону, и мы получим минимум снова в некоторой вершине C многоугольника ограничений.
Если область, задаваемая ограничениями, бесконечна (см. рис. 4.5), то один из оптимумов (максимум или минимум) может стать бесконечным, но другой по-прежнему достигается в некоторой вершине.
Рис. 4.5.
Может случиться, что линия уровня целевой функции – прямая (l) – окажется параллельной какому то звену многоугольника ограничений (см. рис. 4.6).
Рис. 4.6.
В этом случае (при отыскании одного из оптимумов) прямая (l), покидая многоугольник ограничений, ляжет на параллельное ей звено и координаты любой точки этого звена дадут оптимальный план, в этом случае имеем альтернативные оптимальные планы.
Пример: Найти максимум функции z=2x1+3x2 при ограничениях:

Для решения построим прямые и определим общую часть полуплоскостей, изображающих неравенства – ограничения задачи.
l1: x1+2x2=4
|
x1 |
0 |
4 |
|
x2 |
2 |
0 |
l2: 5x1+x2=10
|
x1 |
0 |
2 |
|
x2 |
10 |
0 |
l3: x1-2x2=6
|
x1 |
0 |
6 |
|
x2 |
-3 |
0 |
Построим линию уровня целевой функции z=2x1+3x2, и узнаем, в какую сторону ее надо параллельно перемещать, чтобы целевая функция увеличивалась (см. рис. 4.7).
Вектор целевой
функции имеет вид:
 ,
в данном случае
,
в данном случае
 .
Уравнение целевой функции:
.
Уравнение целевой функции:
2x1+3x2=0
x1=0, x2=0
x1=1, x2=-2/3
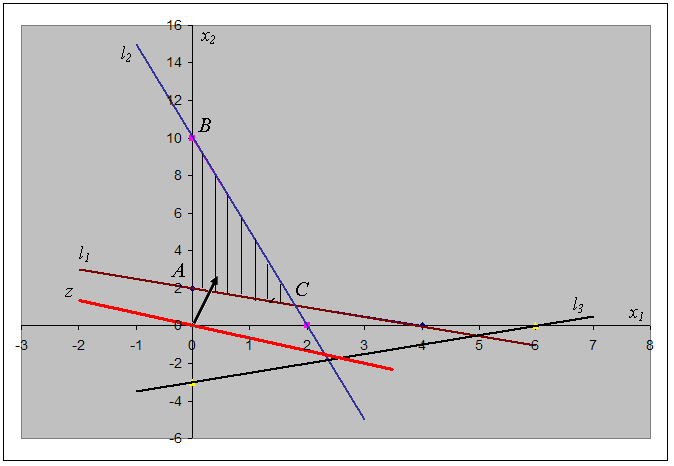
Рис. 4.7
Из рисунка 4.7 видно, что максимальное значение функция z достигает в вершине точки B (пересечения прямой l2 с осью x2), для нахождения координат точки B необходимо решить систему уравнений:

Имеем:

Следовательно, zmax=2·0+3·10=30.
Пример: Найти максимум функции z=2x1+3x2 при ограничениях:

Для решения построим прямые и определим общую часть полуплоскостей, изображающих неравенства – ограничения задачи.
l1: x1+2x2=4
|
x1 |
0 |
4 |
|
x2 |
2 |
0 |
l2: 5x1+x2=10
|
x1 |
0 |
2 |
|
x2 |
10 |
0 |
l3: x1-2x2=6
|
x1 |
0 |
6 |
|
x2 |
-3 |
0 |
Построим линию уровня целевой функции z=2x1+3x2, и узнаем, в какую сторону ее надо параллельно перемещать, чтобы целевая функция увеличивалась (см. рис. 4.7).
Вектор целевой
функции имеет вид:
 ,
в данном случае
,
в данном случае
 .
Уравнение целевой функции:
.
Уравнение целевой функции:
2x1+3x2=0
x1=0, x2=0
x1=1, x2=-2/3

Рис. 4.7
Из рисунка 4.7 видно, что максимальное значение функция z достигает в вершине точки B (пересечения прямой l2 с осью x2), для нахождения координат точки B необходимо решить систему уравнений:

Имеем:

Следовательно, zmax=2·0+3·10=30.