

Плясов Лабораторный практикум по курсу обсчей физики 2011
.pdfсвободный член b, и с их помощью рассчитать момент инерции диска и момент сил трения в его оси:
|
I = |
gr |
, |
(1.11.8) |
|
k |
|||
|
|
|
|
|
Nтр |
= Ib = b gr . |
(1.11.9) |
||
|
|
|
k |
|
Погрешности величин k и b, рассчитанных по формулам (1.11.8) и (1.11.9), определяются соотношениями
|
|
εI |
= |
I |
= |
|
r 2 |
|
|
k 2 |
|
|
|
(1.11.10) |
|||
|
|
I |
|
r |
|
+ |
k |
|
, |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Nтр |
|
r 2 |
|
k 2 |
|
|
b |
2 |
|
||||||
εNтр |
= |
|
|
= |
|
|
|
+ |
|
|
|
+ |
|
|
. |
(1.11.11) |
|
N |
|
r |
k |
b |
|||||||||||||
|
|
тр |
|
|
|
|
|
|
|
|
|
|
|
||||
ОПИСАНИЕ УСТАНОВКИ
Установка, используемая в работе (рис. 1.11.2), состоит из массивного железного диска 1 (твердое тело), снабженного легким язычком – меткой 2 в виде углового сектора, выполненного из алюминия. Сверху диска жестко фиксируются легкие шкивы 3 разных радиусов, на которые наматывается нить 4. Нить далее перекинута через блок 5. На нити закреплен держатель для грузов 6. Диск закреплен на оси, совпадающей с его осью симметрии, и может вращаться на ней практически без трения благодаря воздушной подушке в подшипниковом механизме 7, создаваемой насосом (на рисунке не показан). Управление насосом осуществляется ручкой на его корпусе.
В процессе раскручивания язычок диска пересекает световой барьер 8, который фиксирует время между двумя последовательными закрытиями язычком луча фотодатчика.
Предстартовая фиксация нагруженного диска при работающем насосе осуществляется руками.
Рассмотрим кинематическую составляющую эксперимента, чтобы иметь возможность связать время, измеряемое световым барьером с угловым ускорением и угловой скоростью диска.
171
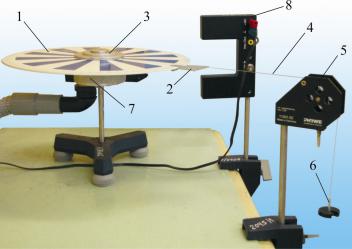
Рис. 1.11.2
Как уже было отмечено, в ходе эксперимента диск движется равноускоренно с нулевой начальной скоростью (именно для этого стартовое положение язычка должно быть прямо перед лучом светового барьера).
При равноускоренном вращении диска из состояния с нулевой угловой скоростью зависимость угла поворота диска от времени имеет вид
ϕ = |
βt |
2 |
(1.11.12) |
2 |
. |
||
|
|
|
Таким образом, если за время t1 диск совершает один оборот, то
он поворачивается на угол 2π , поэтому из первого выражения (1.11.12) можно найти угловое ускорение диска
β = |
4π |
. |
(1.11.13) |
|
|||
|
t2 |
|
|
|
1 |
|
|
Абсолютная погрешность углового ускорения, рассчитанного по формуле (1.11.13), определяется выражением
Δβ = |
8π t1 |
. |
(1.11.14) |
|
|||
|
t3 |
|
|
|
1 |
|
|
|
172 |
|
|

ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ
1.Перед включением воздуходувки проверьте целостность воздуховода.
2.При включении воздуходувки медленно вращайте регулятор мощности на ее передней панели. Не превышайте значение 4 по ее шкале.
3.Будьте осторожны, чтобы пряди волос и длинные детали одежды не попали во вращающиеся детали установки.
ЗАДАНИЕ
Изучение динамики вращательного движения. Определение момента инерции диска
1.Штангенциркулем измерьте диаметр d = 2r всех трех шкивов. Результаты запишите в лабораторный журнал.
2.Намотайте нить на один из шкивов, так чтобы держатель для грузов оказался непосредственно под блоком, при этом язычок диска должен находиться в непосредственной близости от светового барьера.
3.Нагрузите держатель стартовой массой в 20 г. Проверьте, что переключатель фотодатчика находится в положении измерения времени одного оборота  .
.
|
|
|
|
|
|
|
Таблица 1.11.1 |
|
|
|
|
|
|
|
|||
|
21 |
Диаметр шкива 2r =………… мм |
|
|
|
|||
m, г |
31 |
41 |
51 |
61 |
71 |
81 |
|
|
t1, с
<t1 >, с t, с
β, с−1
Δβ, с−1
4. Застопорьте возможное движение диска рукой. Включите насос воздушной подушки, плавно повернув ручку мощности до чет-
173
вертого деления. Нажмите кнопку сброса «Set» показаний на фотодатчике.
5.Отпустите диск. После того, как диск совершит один оборот, счетчик покажет время одного оборота. Остановите диск. Выключите насос воздушной подушки, плавно повернув ручку мощности до нулевого деления. Запишите полученное время в заранее подготовленную табл. 1.11.1.
6.Повторите измерения согласно пп. 3–4 еще два раза.
7.Повторите измерения согласно пп. 3–5, увеличивая каждый раз массу груза на 10 г, в диапазоне до 80 г включительно.
8.Повторите измерения согласно пп. 2–7 для двух других шкивов. Результаты записывайте в заранее подготовленные таблицы, аналогичные табл. 1.11.1.
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
1.По полученным результатам измерений рассчитайте угловое ускорение и его погрешность для каждой массы груза и для каждого радиуса шкива по формулам (1.11.13), (1.11.14). Результаты занесите в таблицу.
2.По данным таблицы постройте три графика зависимости уг-
лового ускорения диска от массы нагрузки β(m) для каждого из
шкивов на одном листе. Сделайте заключение о характере полученной зависимости.
3.Методом парных точек найдите угловые коэффициенты наклона полученных прямых, рассчитайте свободные члены прямых
иих погрешности.
4.По вычисленным параметрам зависимостей β(m) , используя
формулы (1.11.8) и (1.11.9), рассчитайте момент инерции диска I и момент силы трения в оси Nтр . Рассчитайте их погрешности по
формулам (11.10) и (11.11).
5.Рассчитайте средние значения момента инерции диска и момента сил трения в его оси и их погрешности.
6.Сравните результат для момента инерции диска с рассчитанным по теоретической формуле значением.
174
ПРЕДСТАВЛЕНИЕ РЕЗУЛЬТАТОВ РАБОТЫ
В заключении к работе должны быть представлены три графика зависимости углового ускорения диска от массы грузов, построенные по данным измерений времени одного оборота для разных радиусов шкивов. Сделайте вывод о характере полученных зависимостей и о том, как зависит угловой коэффициент зависимости β(m)
от радиуса шкива.
Приведите экспериментально определенные значения момента инерции диска и момента силы сопротивления движению диска. Сравните соответствующие величины с табличными значениями.
Укажите, какие источники систематических ошибок есть в используемой установке.
Табличные значения
Масса диска |
М = 0,829 |
кг |
Радиус диска |
R = 0,175 |
м |
Масса держателя грузов |
1 г |
|
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Сформулируйте основное уравнение динамики вращательного движения тел с закрепленной осью.
2.Как определить направление вектора момента силы относительно закрепленной точки?
3.Дайте определение момента силы относительно закрепленной оси. От чего зависит величина этого момента?
4.От чего зависит угловое ускорение твердого тела при его движении вокруг закрепленной оси?
5.Поясните значение использованных при выводе теоретических формул условий нерастяжимости нити, непроскальзывания нити по шкиву и невесомости нити. Какие упрощения вносят эти условия?
6.Дайте определение моменту инерции тела относительно произвольной оси.
7.Покажите, что результирующий момент внутренних сил системы всегда равен нулю.
175
8.Получите формулу для расчета момента инерции тонкого диска относительно его оси симметрии.
9.Изложите методику определения момента инерции твердого тела по измерению его углового ускорения.
10.Измерения каких физических величин в работе являются прямыми, каких — косвенными?
11.Измерения каких физических величин необходимо произвести, для того чтобы определить момент инерции тел на данной установке?
12.Оцените, каким образом наличие трения в подшипнике может повлиять на экспериментально определяемую величину момента инерции.
13.Изобразите качественно график зависимости момента сил трения в оси подшипникового узла от момента внешних сил.
14.Как экспериментально можно было бы определить максимальный момент сил трения в оси?
15.Указать возможные источники систематических погрешностей в данной работе.
ЛИТЕРАТУРА
Основная
1.Иродов И.Е. Механика. Основные законы. М.: Лаборатория базовых знаний, 2001. С. 161–192.
2.Савельев И.В. Курс общей физики. Механика М.: Астрель, 2001. С. 153–183.
Дополнительная
3. Сивухин Д.В. Общий курс физики. Механика. М.: Физматлит, 2002. Т. 1. С. 176–185, 193–199.
176

ВВЕДЕНИЕ К РАБОТАМ 1.12 И 1.13
При вращении твердого тела вокруг неподвижной оси его инерционные свойства определяются не массой тела, а его моментом инерции относительно оси вращения. Именно эта величина входит в формулы для момента импульса и кинетической энергии вращающегося твердого тела, а также в другие важные соотношения.
Формально понятие момента инерции относительно некоторой оси z можно ввести не только для твердого тела, но и для материальной точки. В этом случае формула для момента инерции Iz вы-
глядит особенно просто:
Iz = mr2 . |
(1.12.1) |
Здесь m – масса материальной точки, а r – ее расстояние до оси z. Момент инерции твердого тела относительно оси z можно найти,
воспользовавшись свойством аддитивности момента инерции. Для этого разобьем твердое тело на N малых частей и представим его как совокупность элементарных масс mi , моменты инерции которых
определяются формулой (1.12.1). Тогда момент инерции твердого тела равен сумме моментов инерции его частей, т.е.
N |
|
|
Iz = ∑ mi ri |
2 , |
(1.12.2) |
i=1
где ri обозначает расстояние до оси вращение элементарной массы с
номером i .
Рассматривая твердое тело как сплошную среду, введем плотность среды ρ = dm dV , где dm – элементарная масса вещества, за-
dV , где dm – элементарная масса вещества, за-
ключенного в объеме в физически бесконечно малом объеме dV , т.е. объеме, размеры которого, с одной стороны, малы по сравнению с размерами тела, а с другой стороны, данный объем содержит большое количество молекул. Плотность вещества может меняться от точки к точке, поэтому ее можно представить как функцию полярного радиуса r (вектора, проведенного из точки на оси z до рассматриваемого малого объема dV , перпендикулярно оси z) и координаты z,
177
или как функцию радиуса-вектора R = r + zez , проведенного из произвольной точки O оси Oz . Тогда элементарная масса может быть записана так: mi ≈ ρ(Ri ) Vi . Подставляя это выражение в формулу (1.12.1) и переходя к пределу, когда элементарные объемы Vi → 0 ,
а число таких объемов N →∞, получим так называемую интегральную сумму, предел которой есть определенный интеграл:
Iz = ∫ρ(R)r2dV , |
(1.12.3) |
V |
|
где интегрирование ведется по всему объему тела.
Из формулы (1.12.3) видно, что момент инерции относительно оси Oz зависит от распределения массы твердого тела относительно рассматриваемой оси. Чем дальше от оси Oz расположены элементарные массы dm = ρ(R)dV , тем больше интеграл (1.12.3), и, следо-
вательно, больше момент инерции твердого тела.
Если известен момент инерции твердого тела IC относительно ка- кой-нибудь оси zC, проходящей через центр масс C тела, то момент инерции Iz относительно любой оси z, параллельной оси zC, может быть определен с помощью теоремы Штейнера:
Iz = IC + ma2 , |
(1.12.4) |
где a − кратчайшее расстояние между осями z и zC, а m − масса тела. Моменты инерции IC некоторых симметричных однородных тел относительно осей симметрии, проходящих через центр масс тел,
приведены во втором столбце табл. 1.12.1.
В четвертом столбце таблицы приведены формулы для расчета относительной погрешности измерений моментов инерции по известным относительным погрешностям прямых измерений массы тел и их размеров. Моменты инерции тел относительно других осей могут быть рассчитаны с помощью формулы (1.12.4).
Моменты инерции некоторых тел сложной формы можно находить, используя формулы табл. 1.12.1 и свойство аддитивности момента инерции.
178

Таблица 1.12.1
Тело, расположение оси |
Момент инерции |
Относительная ошибка |
||||||||
Однородный |
сплошной ци- |
Iz = mR2 |
|
|
|
|
|
|
||
линдр или диск |
|
m 2 |
2 |
R 2 |
||||||
z |
R |
|
2 |
|
|
|
+ |
|
|
|
|
|
R |
||||||||
|
|
m |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Однородный полый цилиндр |
|
|
m(R1 |
+ R2 |
) |
|
m 2 |
+ |
|
2 |
R |
2 |
||||||||||||
R1 |
|
|
|
|
|
m |
|
|
|
|
|
R |
+ |
|||||||||||
|
|
z |
|
I |
|
= |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
R2 |
z |
|
|
2 |
|
|
|
|
|
|
2 1 2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
R2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Однородныйzшар |
R |
|
Iz |
= |
2mR2 |
|
|
|
m 2 |
|
2 |
R 2 |
||||||||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
R |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тонкий однородный стержень |
|
|
|
|
|
|
|
|
|
||
|
|
|
Iz |
= |
mL2 |
|
m 2 |
|
2 L 2 |
||
|
|
|
|
||||||||
|
z |
|
12 |
|
m |
|
+ |
L |
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
Одно из исследуемых тел в данной работе представляет собой тонкий однородный стержень, к которому прикрепляются два одинаковых небольших груза, расположенных симметрично относи-
тельно середины стержня. Момент инерции IC исследуемого тела
179
можно найти, используя свойство аддитивности момента инерции и формулу для момента инерции стержня, приведенную в последней строке табл. 1.12.1:
IC |
= |
ML2 |
+ 2md 2 , |
(1.12.5) |
|
12 |
|||||
|
|
|
|
где M и L – масса и длина стержня соответственно; m – масса одного из грузов; d – расстояние от оси вращения до середины одного из грузов.
Относительная погрешность момента инерции выражается через относительные погрешности масс и размеров стержня и грузов:
I |
|
|
|
M 2 |
|
|
m 2 |
|
2 L 2 |
|
2 d 2 |
|
|||||
|
C |
= |
|
|
|
+ 2 |
|
|
|
+ |
|
|
+ |
|
. |
(1.12.6) |
|
IC |
M |
m |
L |
d |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Динамика вращательного движения твердого тела определяется
моментами сил, действующих на тело. Вектор |
N момента силы |
|
относительно точки |
O определяется как векторное произведение |
|
радиуса-вектора R , |
проведенного из точки O в точку приложения |
|
силы, на вектор силы F : |
|
|
|
N =[R,F]. |
(1.12.7) |
Моментом силы относительно оси Oz , проходящей через точку O , называется проекция момента (1.12.7) на данную ось. Модуль момента силы относительно оси можно записать в виде
Nz |
|
= rF , |
(1.12.8) |
|
где r – плечо момента силы, т.е. кратчайшее расстояние от точки O до прямой, вдоль которой действует сила F .
Основное уравнение динамики вращательного движения твердого тела вокруг неподвижной оси Oz имеет вид
Izβz = Nz , |
(1.12.9) |
где βz – угловое ускорение твердого тела, а |
Nz – сумма моментов |
всех сил, действующих на твердое тело, относительно оси Oz . Угловое ускорение тела есть вторая производная по времени от угла поворота тела, т.е. βz (t) = ϕ(t) , причем в данной формуле угол ϕ счита-
ется положительным, если направление поворота и ось Oz образуют «правый винт».
180