

409_Arhipov_Chuhrov-diskr_soobsch_Monografiya
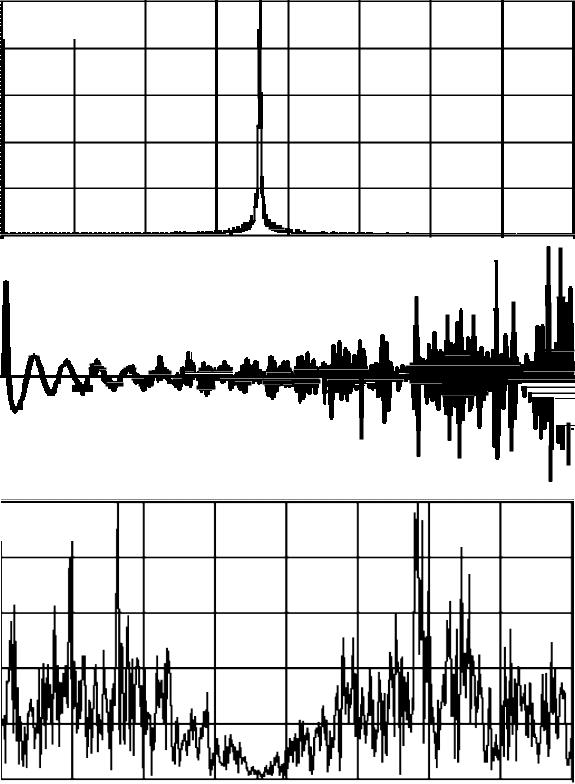
.pdfДля иллюстрации эффекта нормирования на рисунке 3.6 представлены результаты моделирования двухзвенного РФ при подаче на вход суммы одной УП и флуктуационного шума (при выполнении условия РУП>> 2ш): нормированный спектр входной реализации (рисунок 3.6 а); осциллограмма ошибки прямого предсказания на выходе РФ (рисунок 3.6 б) и нормированный спектр ошибки предсказания на выходе РФ (рисунок 3.6 в). Нормировка спектров производилась относительно спектральной составляющей, имеющей максимальное значение по мощности.
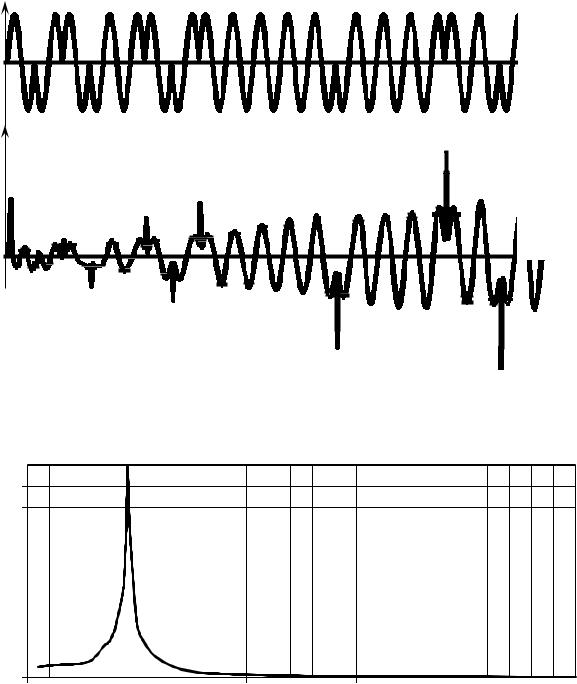
При наличии во входной реализации мощной УП и полезного широкополосного сигнала в виде фазоманипулированной m – последовательности после настройки коэффициентов происходит повышение уровня сигнала, причем, в момент смены фазы, как видно из рисунка 3.7 возникают характерные кратковременные «выбросы», уровень которых возрастает при повышении порядка РФ.
На рисунке 3.8 приведен график частотной зависимости коэффициента затухания узкополосной помехи на выходе РФ второго порядка. Настройка коэффициентов производилась по 200 отсчетам, после чего значения коэффициентов отражения фиксировались, последовательность данных пропускалась через РФ с постоянными коэффициентами, и по полученной выборке производился спектральный анализ при разных частотах УП. По результатам спектрального анализа строился график амплитудно - частотной характеристики РФ KРФ(f). Затухание РФ определялось как величина, обратная коэффициенту передачи АРФ(f) = 1/KРФ(f). Далее коэффициент АРФ(f) нормировался относительно своего значения на частоте fУП:
aРФ ( f ) AРФ ( f ) .
AРФ ( fУП )
Из рисунка 3.8 видно, что характеристика АРФ(f) имеет острый пик на частоте помехи с полосой подавления по уровню 0.707 около 1%, а по уровню 0.1 – около 17% от частоты помехи. Глубина подавления составляет 35 – 40 дБ по отношению к частотам за полосой режекции.
81
а)
S(f)/ Smax(f)
f |
fУП
б)
P,t |
t |
в)
S(f)/ Smax(f)
f
Рисунок 3.6 – Результаты моделирования нормированного РФ при наличии одной УП и флуктуационного шума
82
Uc(t
) |
a) |
t |
2(t)
б)
t
Рисунок 3.7 – Временные реализации фазоманипулированной т – последовательности (а) и ошибки предсказания нормированного РФ второго
порядка
1 |
|
|
|
|
|
|
0,9 |
аРФ(f) |
|
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,7 |
|
|
|
|
|
|
0,6 |
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
0,3 |
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
0,1 |
|
|
|
|
|
f |
0 |
|
fУП |
|
|
|
|
0 |
10 |
20 |
30 |
40 |
50 |
|
Рисунок 3.8 – Нормированный коэффициент ослабления УП (при заданной частоте fУП = 9 Гц)
Из анализа приведенных результатов можно сделать следующие выводы:
1. Минимальный порядок фильтра должен не менее чем в два раза превышать количество узкополосных помех, действующих в канале.
83

2. Уменьшение ошибки предсказания в фильтре первого порядка объяс-
няется применением нормирования данных на входе РФ: 0,Т = r0,Т = xT .  ST
ST
3.Если во входной реализации, помимо мощной УП присутствует широкополосная составляющая (флуктуационный шум или ШПС), то после настройки коэффициентов отражения увеличиваются флуктуации ошибки предсказания, связанные с нормированием данных. При этом на выходе РФ широкополосная составляющая возрастает («вытягивается») до уровня единичной дисперсии.
4.В спектре выходного сигнала виден характерный провал на частоте действующей на входе узкополосной помехи (fУП). Таким образом, решетчатый фильтр после адаптации ведет себя как режекторный фильтр, причем, уровень спектральных составляющих вблизи частоты узкополосной помехи значительно меньше уровня спектральных составляющих за полосой подавления.
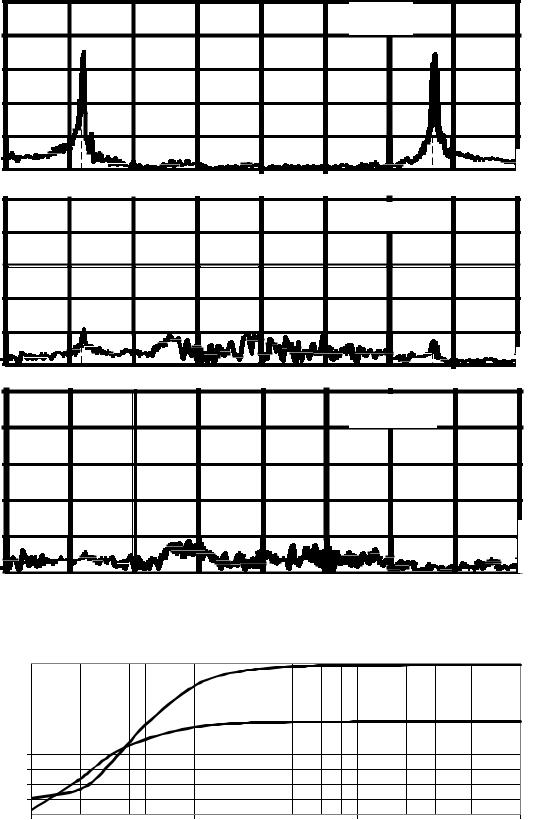
На рисунке 3.9 приведены спектры: а) входной реализации, содержа-
щей две УП с частотами fУП1, fУП2 амплитудами Um1= Um2 = 10В (при порядке РФ Р = 0); б – ошибки прямого предсказания на выходе РФ четвертого порядка (Р = 4); в – ошибки прямого предсказания на выходе РФ шестого порядка (Р = 6).
Результаты показывают, что при двух УП уровень спектральной составляющей помехи на выходе четвертого звена снижается практически до уровня шума, но в спектральной области еще различим. На выходе 6-го звена уровень спектральных составляющих на частоте помехи значительно ниже, чем на других участках спектра.
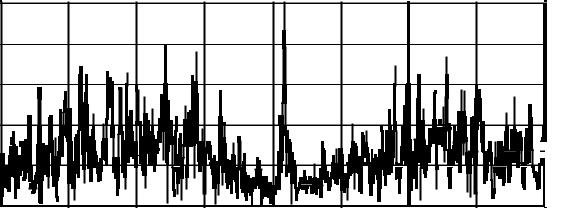
Флуктуационные шумы вносят погрешность в расчет коэффициентов отражения РФ. При уменьшении отношения помеха / шум ошибка оценивания коэффициентов отражения увеличивается. Из рисунка 3.10, на котором приведены зависимости оценки коэффициентов отражения в первом и втором звене РФ при подаче на вход одной гармонической помехи, видно, что значение коэффициентов отражения мало зависят от уровня шумов, если отношение мощности помехи к дисперсии флуктуационного шума h2П > 10. Если это отношение невелико (например, h2П = 4), то вследствие возрастания погрешности в расчете коэффициентов отражения увеличивается уровень неподавленной составляющей помехи в спектре выходного сигнала РФ, как показано на рисунке 3.11.
84
S(f) |
Р = 0 |
|
f |
fУП1 |
fУП2 |
S(f) |
Р = 4 |
fУП1 |
f |
fУП2 |
|
S(f |
Р = 6 |
) |
|
|
f |
Рисунок 3.9 – Спектр ошибки прямого предсказания на выходе РФ различного порядка (Р) при подаче двух гармонических помех
1 |
|
|
|
0,9 |
|
К1 |
|
0,8 |
|
|
|
0,7 |
|
|
|
0,6 |
|
К2 |
|
0,5 |
|
|
|
0,4 |
|
|
|
0,3 |
|
|
|
0,2 |
|
|
|
0,1 |
|
|
h2П |
0 |
10 |
100 |
|
1 |
1000 |
Рисунок 3.10 – Зависимости оценки коэффициентов отражения в первом и втором звене РФ при подаче на вход одной гармонической помехи
от отношения помеха / шум
85
S(f) |
f |
Рисунок 3.11 – Спектр выходного сигнала РФ при подаче на вход одной гармонической помехи и малом отношении помеха / шум (h2П = 4)
Поскольку по-определению УП значительно превышает по уровню широкополосный сигнал и шум, то есть выполняется условие h2П >> 1, то в дальнейшем погрешностью в расчете коэффициентов отражения, обусловленных влиянием флуктуационного шума, можно пренебречь.
в) Исследование влияния экспоненциального весового множителя на ошибку предсказания и скорость адаптации
В [127] отмечается, что поскольку фильтр предсказания действует по полной записи данных на интервале [0,T], то в случае медленных изменений параметров наблюдаемого процесса в алгоритм необходимо ввести ка- кой-то фактор «забывания», чтобы можно было следить за всеми изменениями во времени. Существует ряд способов решения этой задачи, причем один из них основан на замене критерия наименьших квадратов на критерий экспоненциально взвешенных наименьших квадратов, при котором старым отсчетам данных придаются меньшие веса, нежели более новым. Для этого в алгоритмах (1.35, 1.36, 1.39) при расчете выборочных коэффициентов взаимной корреляции ошибок прямого и обратного предсказания (R Р,T, RrР,T,) и выборочного коэффициента частичной корреляции ( Р,T) их предыдущие значения умножаются на экспоненциальный весовой множитель ( ). В известной литературе (например, [127]) не приводится обоснование выбора оптимального значения . Обычно утверждается, что значение экспоненциального весового множителя выбирается в пределах 0.98 – 0.99. Таким образом, представляет интерес исследовать влияние этого весового коэффициента на величину ошибок предсказания и скорость сходимости алгоритмов РФ, в том числе в условиях нестационарности УП.
На рисунке 3.12 показан пример расчета зависимости среднеквадратического отклонения ошибки предсказания РФ второго порядка (при наличии одной гармонической помехи) от экспоненциального весового множителя ( ). Приведенная зависимость показывает, что существует некоторое оптимальное значение опт, при котором ошибка предсказания будет минимальна, причем этот оптимум возможен не только для медленно ме-
86
няющихся, но и для стационарных сигналов.
2
опт
Рисунок 3.12 – Пример расчета дисперсии ошибки предсказания РФ 2-го порядка при изменении коэффициента экспоненциального взвешивания
Более того, опт зависит не только от параметров помехи, но и от объема выборки. Так, для случая одной УП (в отсутствие флуктуационного шума) и применения двухзвенного РФ (Р = 2), зависимость оптимального значения от объема выборки показана на рисунке 3.13.
1,01 |
|
|
|
|
|
|
|
|
опт |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
0,99 |
|
|
|
|
|
|
|
|
0,98 |
|
|
|
|
Р = 4 |
|
|
|
0,97 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,96 |
|
|
|
Р = 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,94 |
|
|
|
|
|
|
|
N |
0,93 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
100 |
1000 |
10000 |
|||||
Рисунок 3.13 – Зависимость оптимального коэффициента предварительного взвешивания ( опт) от объема выборки (N)
Из рисунков 3.12, 3.13 видно, что при объеме выборки N = 20 100 оптимальное значение меняется от 0.93 до 0.98. В этом случае на начальном этапе настройки происходит быстрое забывание больших начальных расстроек (значений данных на входе РФ и на выходе первого звена), что приводит к увеличению скорости сходимости РФ и уменьшению диспер-
87
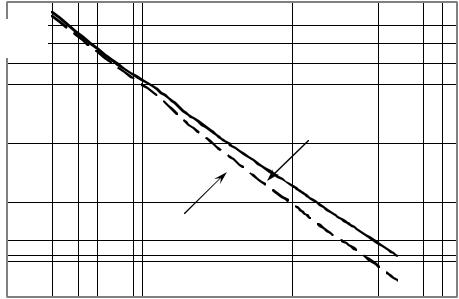
сии ошибки предсказания. При большом объеме выборки (N > 1000) экспоненциальный весовой множитель стремится к единице и составляет 0.996 – 0.999. Это объясняется тем, что к этому времени, в стационарном случае, значение результирующей ошибки предсказания очень мало и составляет 10-4 – 10-5. Поэтому, несмотря на то, что фильтр предсказания действует по полной записи данных, влияние больших начальных рассогласований значительно уменьшается.
Таким образом, существует оптимум: увеличение до единицы повышает вес больших входных расстроек и приводит к некоторому увеличению ошибки предсказания на начальном этапе настройки коэффициентов, а уменьшение приводит к быстрому забыванию данных, что эквивалентно внесению искусственной нестационарности в последовательность данных, что также приведет к возрастанию ошибок предсказания.
Решетчатый фильтр четвертого порядка менее чувствителен к значению весового коэффициента ( ), поскольку при одной УП на вход четвертого звена РФ помеха приходит значительно ослабленной. С ростом числа отсчетов ошибка предсказания на выходе данного РФ уменьшается значительно быстрее, чем на выходе двухзвенного РФ: отсюда весьма низкая зависимость оптимального весового коэффициента от объема выборки (показана на рисунке 3.13 пунктиром) и в этом случае может колебаться от 0.993 до 0.999.
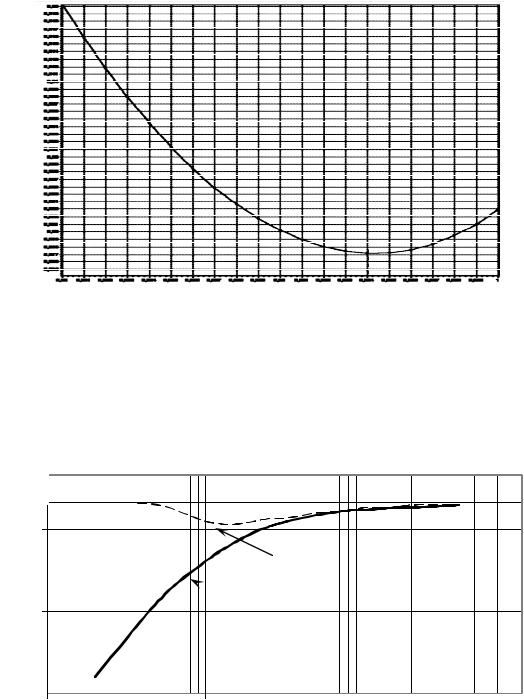
На рисунке 3.14 показана зависимость дисперсии ошибки предсказания на выходе РФ второго порядка без экспоненциального взвешивания (при = 1) и при выборе оптимального значения опт при подаче на вход одной УП и флуктуационного шума.
10 100 1000 10000
1 |
N |
|
2
0,1
0,01 |
|
|
|
= 1 |
0,001 |
|
|
|
|
|
|
|
|
|
|
|
|
||
0,0001 |
|
= опт |
|
|
|
|
|
|
|
0,00001
Рисунок 3.14 – Зависимость среднеквадратической ошибки предсказания от объема выборки без предварительного взвешивания ( = 1) и при оптимизации параметра предварительного взвешивания ( = опт)
88
Из рисунка3.14 видно, что в логарифмическом масштабе дисперсия ошибки предсказания при оптимизации изменяется почти линейно, уменьшаясь в сто раз при каждом десятикратном увеличении объема выборки.
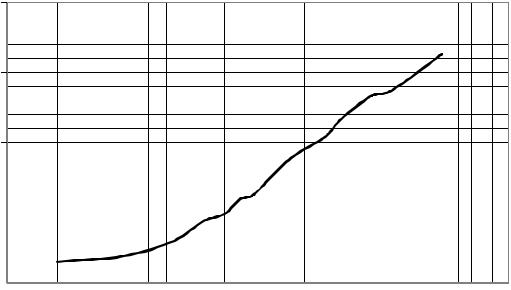
Таким образом, как показано на рисунке 3.15, при введении оптимизации дисперсия ошибки уменьшается в 1,15 раз при объеме выборки N < 20. При возрастании объема выборки (N > 1000) дисперсия ошибки предсказания уменьшается в 2 – 2,6 раза.
По оси ординат показан коэффициент дополнительного уменьшения дисперсии ошибки предсказания , который определяется как отношение дисперсии ошибки без экспоненциального взвешивания ( = 1) к диспер-
|
|
|
|
|
|
2 |
|
|
сии ошибки при оптимизации ( = опт): |
|
|
1 |
). |
||||
|
2 |
|
||||||
|
|
|
|
|
|
опт |
|
|
|
|
|
|
|
|
|
||
10 |
100 |
1000 |
10000 |
|||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2
1,5
1
Рисунок 3.15 – Зависимость коэффициента дополнительного уменьшения дисперсии ошибки предсказания РФ 2-го порядка от объема выборки при оптимизации
Таким образом, при расчете коэффициентов отражения целесообразно выбирать оптимальное значение коэффициента либо исходя из заданного объема выборки, либо динамически изменять значение экспоненциального весового множителя в соответствии с увеличением объема выборки, что приводит к повышению скорости сходимости РФ и уменьшению ошибок предсказания.
При наличии быстрых замираний, моделируемых введением амплитудной модуляции УП (рисунок 3.16), оптимальные значения опт не зависят от глубины замираний. На этом же рисунке для сравнения показана временная зависимость ошибки предсказания на выходе РФ второго по-
89

рядка, которая показывает, что даже в условиях нестационарности параметров УП решетчатый фильтр эффективно подавляет помеху. Но при этом зависимость дисперсии предсказания от объема выборки будет иметь нелинейный характер (в отличие от стационарного случая).
АМ помеха
t
2
Рисунок 3.16 –АМ-помеха (с индексом модуляции М=0.5 и частотой fm = 0.001fУП) и ошибка предсказания РФ 2-го порядка 2
На рисунке 3.17 (а – в) показаны сравнительные зависимости дисперсии ошибки предсказания от объема выборки при различных индексах модуляции УП.
Уменьшение дисперсии ошибки при N = 1000 и увеличение при N = 2000 объясняется влиянием низкочастотной огибающей УП. При глубоких замираниях относительное изменение ошибки предсказания значительно возрастает. Пунктиром показаны аналогичные зависимости при оптимизации экспоненциального весового множителя.
2 10 |
100 |
1000 |
10000 |
1 |
|
|
N |
а) 0,1  0,01
0,01  0,001
0,001  0,0001
0,0001  0,00001
0,00001
90