

Авиационные оптико-электронные системы прицеливания и наведения (120
..pdfну линейного отставания б (как и при отсутствии ветра). Поэтомуб нужно отложить от точки О2 в направлении, противоположном
вектору V (начальной скорости бомбы), т. е. бомба встретится с землей в точке Ц, где и должна находиться цель.
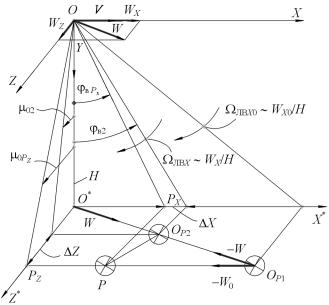
Рис. 4. Схема прицеливания при бомбометании при наличии бокового ветра
В зависимости от способа установки ОПБ на самолете возможны несколько вариантов задания положения самолета относительно цели в момент сброса бомбы. Чаще других применяют жесткую (неподвижную) установку ОПБ, когда базовая ось Х прибора совпадает с продольной осью самолета. Его положение относительно цели задается тремя координатами: высотой полета и двумя угла-
ми: углом прицеливания п (он строится в вертикальной плоскости ХОбрY ) и углом бокового смещения визирного луча (он строится в наклонной плоскости ОбрЦЦ , перпендикулярной плос-
кости курса самолета). Согласно прицельной схеме можно получить, что
tg п WX Tб б WX Tб tg б,
H H
11
где |
WX V U X V U cos (U X – продольная составляющая |
||
вектора ветра; – его бортовой угол), а также |
|||
|
tg |
WZTб |
cos п 0 cos п, |
|
|
||
|
|
H |
|
где |
WZ W sin UZ U sin – боковая составляющая вектора |
||
ветра.
Выражение для расчета угла прицеливания можно представить также в виде
tg п VTHA UHX Tб ,
где TA0 A0  V – время, за которое самолет пролетит расстояние, равное штилевому относу бомбы А0.
V – время, за которое самолет пролетит расстояние, равное штилевому относу бомбы А0.
Таким образом, к моменту сброса бомбы в процессе непрерывного слежения за целью ОПБ должен: 1) сформировать команды на разворот самолета для его выхода на боевой курс, когда
п 0; 2) с участием оператора уточнить начально введенные
составляющие вектора ветра, а затем рассчитать и построить углып и ; 3) выдать команду на сброс бомбы в момент достижения
равенства в п.
Современные ОПБ позволяют решить задачу прицеливания при бомбометании по движущейся цели, выполнить бомбометание серией из n бомб или одновременно несколькими самолетами, летящими определенным строем, а также решить другие тактические задачи прицеливания при бомбометании. При этом в каждом конкретном случае в угол прицеливания вводится поправка, зависящая от тактических особенностей выполнения процесса прицеливания. Так, бомбометание одним самолетом серией из n бомб позволяет существенно повысить вероятность поражения цели, имеющей заметную протяженность в направлении ЛБП самолета. Процесс прицеливания в этом случае осуществляется так, чтобы точка падения первой сброшенной бомбы имела бы «недолет» до цели, равный расстоянию половины линейной длины серии Lс.
Все последующие бомбы сбрасываются автоматически через временной интервал серии tс Lс W (n 1) , который определяется
W (n 1) , который определяется
12
предварительно и вводится штурманом в соответствующий механизм прицела. Так как прицеливание при сбросе первой бомбы выполняется по реально наблюдаемой цели, то в угол прицеливания необходимо ввести поправку. При этом значение угла прицеливания рассчитывают согласно прицельной схеме:
tg |
|
|
|
А |
|
Lс |
cos |
WХTб tg |
|
|
Lс |
, |
|
п |
|
|
б |
|
|||||||||
|
|
пр |
|
2 |
|
Н |
H |
|
2H |
|
|||
|
|
|
|
|
|
|
|
|
|
||||
где Lс (2Н) – поправка на серийное бомбометание.
(2Н) – поправка на серийное бомбометание.
3.СТРУКТУРНАЯ СХЕМА ПРИЦЕЛЬНОГО КОМПЛЕКСА
ИФУНКЦИИ ШТУРМАНА В ЕГО СОСТАВЕ
Выполнение процесса прицеливания реализуется при определенном участии человека-оператора с помощью прицельно-навигацион- ного комплекса (ПНК) самолета. Его основу составляет ОПБ. Работа современного ПНК иллюстрируется его обобщенной структурной схемой (рис. 5). Основными функциональными блоками ПНК следует считать:
1) визирную систему (ВС), предназначенную для поиска, обнаружения и последующего слежения за целью; с ее помощью в процессе непрерывного слежения за целью определяется текущее положение самолета относительно последней (и по направлению,
и по дальности), например углы в, i и *пi , а также может быть
измерен или уточнен вектор ветра; 2) решающие устройства (РУ), которые на основе введенной в
них прицельно-навигационной информации автоматически (или штурманом с помощью соответствующих рукояток) рассчитывают
баллистические параметры (Тб и tg б), требуемые для прицельного бомбометания координаты самолета ( п, , ), а также авто-
матически управляют пространственным положением линии визирования в процессе слежения за целью; если текущий курс самоле-
та не равен боевому курсу, т. е. п i , то механизм боковой наводки (МБН) вырабатывает команды на разворот самолета, обес-
13

печивая его выход на боевой курс, а в момент достижения равен-
ства в i п механизм автоматического сбрасывания (МАС)
выдает команду на сброс бомбы; 3) датчики текущей пилотажно-навигационной информации, с
помощью которых непрерывно и автоматически измеряются и вводятся значения высоты и скорости полета самолета, а также изме-
нение его курса V .
Рис. 5. Структурная схема ПНК самолета-бомбардировщика
По особенностям исполнения и работы решающих устройств ПНК подразделяют на два класса: аналоговые и цифровые.
В ПНК аналогового класса все расчеты и управление работой ОПБ осуществляются с помощью вычислительных устройств и механизмов типа кулачков, коноидов, фрикционных интеграторов, потенциометрических решающих и следящих мостов и других электромеханических устройств. Они относительно просты в исполнении и надежны в работе, однако имеют достаточно большие размеры и накладывают жесткие ограничения на рабочие диапазоны значений вводимых в них исходных параметров (Н, V , U , ).
Поэтому в настоящее время используются более гибкие в работе цифровые вычислители, которые строятся на базе специализированных микропроцессоров или центральной ЭВМ самолета. На основе введенных в них исходных и текущих данных такие ре-
14

шающие устройства автоматически выполняют все операции прицеливания и управления движением самолета.
В составе ПНК любого класса функции штурмана сводятся к выполнению следующих операций (см. рис. 5): 1) вводу в ПНК еще до начала прицеливания ряда исходных данных, определяющих тип бомбы ( ), ожидаемые метеоусловия в районе цели
(U X 0 , UZ 0, p0 , T0 ), поправки на высоту ( Н), скорость ( V ) и тактику бомбометания (например, поправку на серию Lс  2H );
2H );
2) уточнению введенных выше значений составляющих вектора ветра в процессе автосинхронного слежения за каким-либо замет-
ным наземным ориентиром: U X U X 0 U X и |
UZ UZ 0 |
UZ , где U X , UZ – поправки, вырабатываемые механизмом
измерения вектора ветра (МИВВ). Для этого (см. рис. 5 и 6) штурман вращением рукояток визирования (РВ) «набрасывает» пере-
крестие ВС на ориентир (точка ОР1 ) и включает МИВВ, а также
механизм синхронизации (МС), который обеспечивает вращение линии визирования со скоростью ЛВ = K W0  H и «компенса-
H и «компенса-
цию» поступательного движения самолета относительно поверхности Земли. Так как W0 V U0 W V U , через некоторый
фиксируемый промежуток времени 12 ориентир смещается с перекрестия на величину РОР2 U 12 , где U U0 U. Поэтому штурман второй раз «набрасывает» перекрестие на изображение
ориентира, |
измеряя |
тем |
самым отрезок РОР2 |
Х2 |
Z 2 2 . |
||||
Поскольку |
согласно |
рис. |
6 |
X H tg вPХ tg в2 , |
а Z |
||||
H tg 0PZ tg 02 , то |
|
|
|
|
|
|
|
||
|
|
U X |
|
H |
tg вPX tg в2 ; |
|
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
12 |
|
|
|
|
|
|
U2 |
H |
|
tg 0 PZ tg 02 . |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
12 |
|
|
|
|
||
В результате МС начинает вращать линию визирования со скоростью ЛВ K W  H (K 0,5 – коэффициент пропорциональ-
H (K 0,5 – коэффициент пропорциональ-
ности) и при последующем поступательном движении самолета
15
ориентир больше не смещается с перекрестия ВС, так как МС обеспечивает изменение значений тангенсов углов в и 0 во
времени t t2 t1:
t2 |
WX |
|
|
t |
|
|
dt; |
|
Н |
||
tg в |
|
|
|
1 |
|
|
|
t2 |
W |
|
|
tg 0 t |
|
Z |
dt. |
|
H |
||
1 |
|
|
|
Рис. 6. Автосинхронное уточнение составляющих вектора ветра
Так как после обнаружения цели в процессе выполнения боковой наводки самолет должен разворачиваться по курсу, для непрерывного удержания линии визирования на цели необходимо дополнительно «довернуть» линию визирования пропорционально
изменению курса самолета ( V = 2 1) и соответствующим
образом перестроить векторный треугольник скоростей согласно изменению составляющих вектора ветра в связанной с самолетом
16
системе координат. Эти операции выполняются автоматически с помощью механизмов стабилизации вектора цели и вектора ветра соответственно. Можно показать, что для компенсации враща-
тельного движения самолета тангенсы углов в и 0 необходимо дополнительно изменять согласно выражениям
2
tg в tg 0 i d V ;
1
2
tg 0 tg вi d V ,
1
а составляющие вектора ветра перестраивать введением поправок, рассчитываемых по формулам
2
U X UZ ,i d V ;
1
2
UZ U X ,i d V .
1
Вариант исполнения и особенности работы этих механизмов рассматриваются на лабораторных занятиях.
4. ВИЗИРНЫЕ СИСТЕМЫ ОПТИЧЕСКИХ ПРИЦЕЛОВ БОМБОМЕТАНИЯ
И МЕХАНИЗМЫ ИХ СТАБИЛИЗАЦИИ
Визирные системы ОПБ предназначены для поиска, обнаружения и опознавания цели, последующего автоматического слежения за ней с помощью механизма синхронизации, а также механизмов стабилизации вектора цели и вектора ветра. Благодаря этому непрерывно определяется текущее положение самолета относитель-
но цели, т. е. его угловые координаты вi , 0i , пi .
Визирные системы ОПБ подразделяют на оптические, оптико-
электронные и радиолокационные.
В дневных условиях слежение за целью может осуществляться с помощью простейших коллиматорных ВС или более сложных, но
17

обладающих большим разрешением телескопических ВС. В настоящее время они заменяются оптико-телевизионными визирами, позволяющими наблюдать картину одновременно нескольким членам экипажа самолета. Ночью телескопическая система дополняется каналом, оснащенным электронно-оптическим преобразователем. Иногда прицеливание выполняется с помощью тепловизионной системы, хорошо сочетающейся с дневным оптико-телевизионным визиром (последний представляет собой телевизионное устройство, способное успешно работать в широком диапазоне значений освещенности в плоскости цели). В условиях плохой оптической видимости слежение за целью осуществляется радиолокационной станцией, которая всегда входит в состав ПНК и положение оси визирования которой согласуется с направлением оси оптической (оп- тико-электронной) системы.
При выборе типа и параметров ВС необходимо исходить из соображений обеспечения быстрого поиска и опознавания цели как днем, так и ночью на дальностях, достаточных для последующего выполнения процесса прицеливания, и удобства работы экипажа с учетом его размещения на самолете. Поэтому важнейшими параметрами ВС следует считать угловое поле и разрешающую способность, которые определяют эффективность процесса поиска и опознавания цели, и энергетическую чувствительность (напри-
мер, пороговую облученность Епор) используемого в ней прием-
ника излучения, от которой зависит дальность надежного опознавания цели.
Практика применения ОПБ показала, что на этапе поиска цели
достаточно иметь |
угловое поле шириной |
2 |
D |
f |
|
|
|
|
ВС |
п.д |
об |
15 ...18 , где D |
– диаметр полевой диафрагмы, а |
f – фокус- |
|||
п.д |
|
|
|
об |
|
ное расстояние объектива ВС. |
|
|
|
|
|
Угловая разрешающая способность BC |
и максимальная даль- |
||||
ность опознавания |
цели lmax связаны |
соотношением |
ВС |
||
ац Nlmax , где aц – проекция определяющего размера цели на
Nlmax , где aц – проекция определяющего размера цели на
плоскость, перпендикулярную линии визирования, а N – число периодов ТЭМ эквивалентной пространственной миры, которое долж-
но «укладываться» в размере ац для опознавания ее с заданной вероятностью P0 и требуемым энергетическим (яркостным) контра-
18
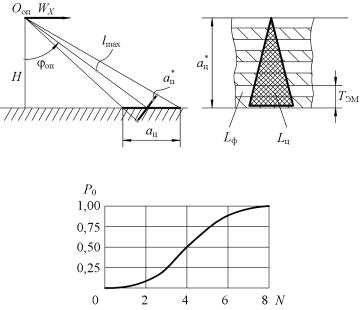
стом Kтр Lц Lф  Lф относительно фона (рис. 7). Экспериментально полученная зависимость P0 (N ) при визуальном восприятии наблюдаемой картины с Kтр 0,2 представлена на рис. 8.
Lф относительно фона (рис. 7). Экспериментально полученная зависимость P0 (N ) при визуальном восприятии наблюдаемой картины с Kтр 0,2 представлена на рис. 8.
Рис. 7. Опознавание цели по эквивалентной ей пространственной мире
Рис. 8. Зависимость вероятности опознавания цели от числа периодов миры при Kтр 0,2
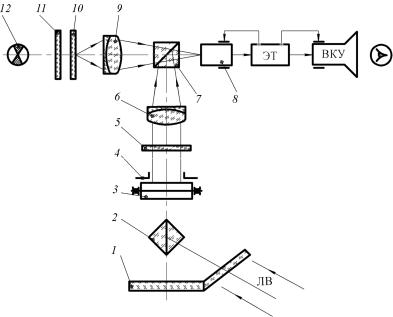
Вариант исполнения оптико-телевизионного визира приведен на рис. 9. После обработки видеосигнала электронным трактом (ЭТ) наблюдаемая картина визуализируется на экране видеоконтрольного устройства (ВКУ). Куб-призмы служат для оборачивания изображения, функционального отклонения линии визирования и ее стабилизации в пространстве от случайных колебаний и
качаний корпуса самолета по крену с и тангажу .
Для выполнения последней функции призмы механически связаны с внешними рамками гиростабилизатора (ГС), конструктивно входящего в состав ОПБ. Дополнительно ГС задает направление
местной вертикали (МВ), от которой строятся углы п, в, 0 , а также измеряет угол крена самолета , значение которого затем
19
используется для пересчета координат цели (направления линии визирования), полученных на выходе нестабилизированной в пространстве антенны радиолокационной системы.
Рис. 9. Оптико-телевизионная визирная система бомбардировочного прицела:
1 – защитное стекло; 2, 3 – куб-призмы соответственно продольного и бокового визирования; 4 – регулируемая ирисовая диафрагма; 5 – набор светофильтров; 6 – сменные объективы с фокусным расстоянием 40, 100 и 140 мм; 7 – призма, объединяющая световые пучки основного и проекционного каналов; 8 – видикон; 9 – проекционный объектив, 10 – сетка; 11 – матовое стекло; 12 – лампа для подсвет-
ки сетки
В настоящее время в качестве механизмов пространственной стабилизации линии визирования используются исключительно гироплатформы на двух или более свободных гироскопах. При этом может быть реализована прямая либо косвенная стабилизация углового поля ВС прицела. В первом случае ГС конструктивно объединяется с ВС, а его внешние рамки механически связаны с куб-призмами продольного (ППВ) и бокового (ПБВ) визирования, благодаря чему обеспечивается их разворот на углы, равные половине углов разворота самолета по тангажу и крену соответственно
(рис. 10).
20