

Проектирование систем наведения радиотехнических и оптических комплексов. Ч. 2 (96
.pdfРис. 14
двух компенсирующих связей, передающих сигнал из грубого канала в точный канал.
1.5. Двухканальная система наведения с двумя компенсирующими связями из грубого канала в точный канал
Структурная схема ДСН с двумя компенсирующими связями, передающими сигнал из грубого канала в точный канал, представ-
лена на рис. 15, где R1 ( p) – передаточная функция фильтра в первой компенсирующей связи; R2 ( p) – передаточная функция фильтра во второй компенсирующей связи; 1 (t) – восстановленный сигнал ошибки грубого канала 1 (t).
Рис. 15
21

Целью введения двух компенсирующих связей является восстановление сигнала ошибки грубого канала 1 (t) для отработки
его приводом точного канала. Восстановленный сигнал имеет вид
|
1 (t) 1 (t)[R1 ( p) R2 ( p)] n1 (t)R1 ( p) 1 (t)R2 ( p). |
(30) |
При выполнении условия
R1 ( p) R2 ( p) 1 |
(31) |
восстановленный сигнал принимает вид
|
1 (t) 1 (t) n1 (t)R1 ( p) 1 (t)R2 ( p). |
(32) |
Выберем в качестве первой компенсирующей связи R1 ( p)
фильтр низких частот, а в качестве второй компенсирующей связи R2 ( p) – фильтр высоких частот. Примеры компенсирующих связей
R1 ( p), R2 ( p) представлены на рис. 16. Тогда при соблюдении условия (31) и соответствующем выборе фильтровR1 ( p), R2 ( p) можно с высокой степенью точности получить восстановление ошибки грубого канала 1 (t) 1 (t) в режиме двухканального автосопрово-
ждения. Очевидно, что полоса пропускания фильтра низких частот R1 ( p) должна быть как можно меньше, а полоса пропускания
фильтра высоких частот R2 ( p) должна быть больше области рабочих частот входного управляющего сигнала 1 (t), однако при выборе фильтров должно соблюдаться условие (31).
Рис. 16
22
В качестве источника первой компенсирующей связи R1 ( p)
используется сигнал приемного устройства грубого канала. В качестве источника второй компенсирующей связи R2 ( p) может быть
использован, например, датчик ускорений (вибродатчик), установленный на объекте регулирования грубого канала. Передаточная
функция R2 ( p) в этом случае включает передаточную функцию соб-
ственно датчика ускорений и дополнительного к нему корректирующегоустройства, обеспечивающегожелаемыефильтрующиесвойства.
2. УРАВНЕНИЯ ДИНАМИКИ СИСТЕМ НАВЕДЕНИЯ
2.1. Уравнения механической части двухканальной системы наведения
Для получения уравнений механической части ДСН используем модель ее механической части, размещенную на подвижном основании, при расположении осей наведения грубого и точного каналов «ось в ось». В качестве особенностей ДСН в модели учтены упругие деформации в механической передаче грубого канала и в подвесе точного канала в виде упругих звеньев. Модель представлена на рис. 17, где 1 – подвижное основание; 2 – исполнительный двигатель ПГК; 3 – объект регулирования ПГК; 4 – подвес точного канала; 5 – объект регулирования ПТК; 6 – исполнительный двигатель ПТК. Использованы также следующие обозначения: М0,
M1, M 2 – внешние моменты; – угол поворота подвижного основания; 1 , 1, , 2 – углы поворота вала ПГК, объекта регулирования ПГК, подвеса, объекта регулирования ПТК; d1, d 2 – уг-
лы поворота исполнительных двигателей; C1, F1, CП, FП – коэффициенты жесткости и внутреннего вязкого трения упругих звеньев в
механической передаче грубого канала и в подвесе, J11, J , J2 , Jd1, Jd 2 – моменты инерции объекта регулирования ПГК, подвеса
точного канала, объекта регулирования ПТК, исполнительного двигателя ПГК, исполнительного двигателя ПТК. Индексы «о» и «а» в выражениях углов обозначают соответственно относительное и абсолютное движение.
23
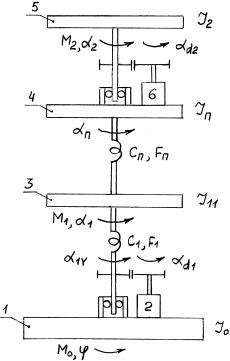
Рис. 17
Кинематические соотношения для механической системы имеют вид
a |
|
о , |
|
|
1 |
|
1 |
|
|
a |
о |
, |
|
|
1 |
|
1 |
|
|
ad1 оd1 , |
|
|||
a |
|
о |
|
|
, |
(33) |
|||
a2 |
о2 a , |
|||
ad 2 оd 2 a ,
оd1 ( 1)m1i1( 1о P ),
оd 2 ( 1)m2 i2 о2 .
24
Здесь i1, i2 – передаточные числа механических передач; m1, m2 –
числа пар зубчатых зацеплений механических передач. Механическая система имеет пять степеней свободы. Для полу-
чения уравнений, описывающих ее, используем уравнения Лагранжа 2-го рода
|
d |
T |
|
T |
Q , |
(34) |
||
|
|
|
|
|
|
|||
|
|
|
|
|
i |
|
||
|
dt qi |
|
qi |
|
||||
где i 0,1, ..., 4; qi – обобщенные координаты; Qi |
– обобщенные |
|||||||
моменты; T – кинетическая энергия механической системы. Выберем в качестве обобщенных следующие координаты:
q0 ,
q1 1a ,
q2 1a , (35)
q3 a , q4 a2 .
Кинетическая энергия системы имеет вид
T |
|
1 |
J0 |
d 2 |
|
1 |
J11 |
d 1а 2 |
|
1 |
Jd1 |
d аd1 |
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2 |
2 |
dt |
|
2 |
|
dt |
|
|||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
а |
|
2 |
|
|
|
|
|
а |
2 |
|
|
|
|
а |
|
|
2 |
|
|
|
1 J d |
|
|
1 J2 |
d |
2 |
|
|
1 Jd 2 |
|
d d 2 |
|
. |
(36) |
||||||||||
|
||||||||||||||||||||||||
|
2 |
|
|
|
dt |
|
|
|
2 |
|
dt |
|
|
|
2 |
|
|
dt |
|
|
|
|
||
Обобщенные моменты Qi определяются соотношением
Qi |
A |
, |
(37) |
1 |
qi |
qi |
|
где – потенциальная энергия системы; A – элементарная рабо-
та от -го момента сил, действующих на систему при ненулевом приращении qi .
25
Потенциальная энергия системы имеет вид
|
1 C |
а |
а |
2 |
1 C |
а а |
2 . |
(38) |
|
|
2 1 |
1 |
1 |
|
2 |
2 1 |
|
|
|
Из (35), (37), (38) получим следующие обобщенные моменты:
Q M |
0 |
M |
d1 |
1 m1 i , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Q M |
d1 |
1 m1 i F p C |
а |
|
а |
, |
|
|
|
|
|
|
|
||||||||||||||||
1 |
|
|
|
|
1 |
|
|
1 |
|
|
1 |
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
||||
Q M |
1 |
F p C |
а |
|
а |
|
|
F |
|
p C |
|
|
а а |
, |
(39) |
||||||||||||||
2 |
|
|
|
1 |
|
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||
Q M |
d 2 |
1 m2 i |
2 |
F p C |
|
а а |
|
, |
|
|
|
|
|||||||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||
Q M |
d 2 |
1 m2 i |
2 |
M |
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Решив совместно (34), (36), (39), получим уравнения механической части ДСН, расположенной на подвижном основании, с учетом упругих деформаций в механической передаче ПГК и в подвесе ПТК:
подвижное основание (позиция 1 на рис. 17)
M |
0 |
M |
1 |
M |
2 |
J |
0 |
|
p2 ( ) J |
11 |
p2 ( o |
) |
|
|
|
|
|
|
1 |
|
|
||||||
Jd1 p2 ( od1) J21 p2 ( o2 ) J p2 ( o ); |
(40) |
||||||||||||
нижняя ступень (позиции 2, 3, 4 на рис. 17)
M1 M 2 M d1( 1)m1i1 Jd1( 1)m1i1 p2 ( od1)
J11 p2 ( 1o ) J21 p2 ( o2 ) J p2 ( o ) J10 p2 ( ),
o |
1 N 1( p) o N 1( p) |
|
|
|
1 |
J |
p2 ( o ) M |
|
, (41) |
|||||||||||
C |
|
|
|
|||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
F p 21 |
2 |
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
o |
|
1 |
|
J21 |
N |
1( p) |
o |
|
J |
N 1 |
( p) o |
N 1( p) |
|
|
||||||
|
|
|
|
|
||||||||||||||||
1 |
|
|
J1 |
1 |
|
1 |
|
J1 |
1 |
|
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
2 |
o |
|
|
|
|
|
|
|
|
|
|
|
|
C |
F p J21 p |
|
( 2 ) |
M1 M 2 |
; |
|
|
|
|
|
|
|
||||||||
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26
|
|
верхняя ступень (позиции 5, 6 на рис. 17) |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
M |
2 |
M |
d 2 |
( 1)m2 i |
|
|
J |
d |
2 |
( 1)m2 i p2 |
( о |
2 |
) J |
2 |
p2 |
( o ) J |
21 |
p2 ( a ). (42) |
||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
d |
|
|
|
|
|
2 |
|
|
2 |
|||||||||||||
|
|
В (40)–(42) обозначено: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J1 J1 J2 Jd 2 , |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J1 J11 J , |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J J J2 Jd 2 , |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
21 |
J |
2 |
J |
|
|
i ( 1)m2 |
, |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J0 J0 |
Jd1 J1 , |
|
|
|
|
|
|
|
(43) |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
10 |
J |
1 |
J |
|
i ( 1)m1, |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 1( p) |
J1 p2 |
|
|
, |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
C1 F1 p |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N 1( p) |
|
|
|
J p2 |
|
. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C F p |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Для случая абсолютно жесткой механической передачи ПГК |
||||||||||||||||||||||||||||||||||||||
( C1 ) |
и абсолютно жесткого подвеса ПТК ( C ) |
уравнения |
||||||||||||||||||||||||||||||||||||||
механической системы имеют следующий вид: |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
подвижное основание |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
M |
0 |
|
M |
1 |
M |
2 |
J |
0 |
p |
2 ( ) J |
1 |
p2 ( o ) |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
Jd1 p2 ( od1) J21 p2 ( o2 ) J21 p2 ( o2 ); |
|
|
(44) |
|||||||||||||||||||||||||||||
|
|
нижняя ступень |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
M |
1 |
M |
2 |
M |
d1 |
( 1)m1i J |
d1 |
( 1)m1i p2 ( o |
) J |
1 |
p2 ( o ) |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
d1 |
|
|
|
1 |
|||||||||||
|
|
J10 p2 ( ) J21 p2 ( o2 ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(45) |
|||||||||||||||||
|
|
o |
o |
|
o |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
верхняя ступень
M 2 M d 2 ( 1)m2 i2 Jd 2 ( 1)m2 i2 p2 ( od 2 ) J2 p2 ( o2 ) J21 p2 ( a2 ). (46)
В выражениях (40) – (46) составляющие при сомножителе J21
отражают динамическое взаимодействие между грубым и точным каналами, а составляющие при сомножителе J10 – динамическое
воздействие подвижного основания на грубый канал.
2.2.Уравнения динамики двухканальной системы наведения
скомпенсирующими связями
Рассмотрим ДСН с двумя компенсирующими связями при отсутствии упругих деформаций.
Уравнения ДСН с двумя компенсирующими связями имеют вид
a |
(t) o |
(t) (t), |
1 |
1 |
|
a |
(t) o |
(t) a (t), |
2 |
2 |
1 |
(t) к (t) в(t), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
W |
1 |
( p) o |
(t) |
P |
( p) (t) n (t) a (t) B ( p)M |
H1 |
(t), |
|
|
|||||||||||||||||||||||||
|
|
D1 |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
|
(47) |
||||||
|
|
|
1 |
( p) o (t) |
|
(t) a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
|
(t) n (t) ( p) |
|
|
(t) B ( p)M |
H 2 |
(t), |
|||||||||||||||||||||||||||
|
|
D2 |
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|||||
|
M |
Н1 |
(t) M |
1 |
(t) M |
2 |
(t) J |
21 |
p2 ( o |
(t)) J |
10 |
p |
2 ( (t)) J |
1 |
p2 |
( o (t)), |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
||||||||||
|
M |
Н2 |
(t) M |
2 |
(t) J |
21 |
p2 ( o |
(t)) J |
2 |
p2 |
( o |
(t)), |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
(t) R ( p) (t) a (t) n (t) R ( p) a (t). |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
1 |
|
1 |
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
Здесь WD11 ( p) – обратная передаточная функция ПГК при отклю-
ченной инерционной нагрузке (W1 1 ( p) при J1 0 ); WD21 ( p) – обратная передаточная функция ПТК при отключенной инерционной нагрузке (W2 1 ( p) при J2 0 ). Заметим, что выражения M H1 (t), M H2 (t) можно интерпретировать как внешние моменты, которые
действуют на ПГК и ПТК, если рассматривать эти приводы как автономные.
28
29
Рис. 18
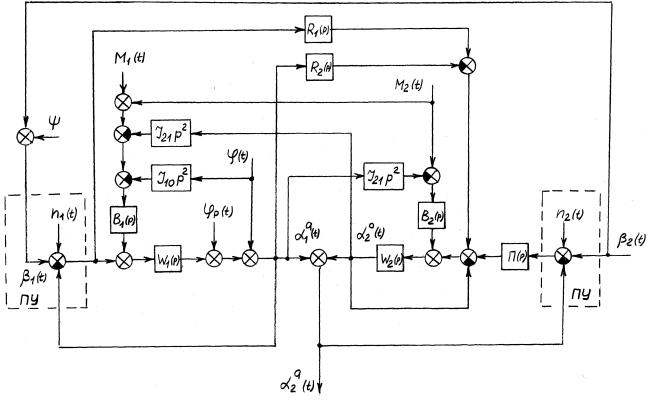
Для возможности анализа ДСН входные воздействия каналов необходимо связать через параллактическое смещение (t) между ви-
зирными осями их приемных устройств (см. п. 5.2.6 в первой части):
1 (t) 2 (t) (t). |
(48) |
Введем также обозначения: |
|
B ( p) J |
21 |
B ( p) p2 |
; |
|
|
12 |
|
1 |
|
|
|
B |
( p) J |
21 |
B ( p) p2 ; |
(49) |
|
21 |
|
2 |
|
|
|
B |
( p) J |
10 |
B ( p) p2 |
; |
|
10 |
|
1 |
|
|
|
где B1 ( p), B2 ( p) – операторы моментного воздействия соответст-
венно на ПГК и ПТК.
Структурная схема ДСН, соответствующаяуравнениям (44) – (49), представлена на рис. 18. Заметим, что в отличие от рассмотренных выше структурных схем ДСН в данной структурной схеме отражены особенности взаимодействия каналов и подвижного основания через объект регулирования.
3. АНАЛИЗ ДИНАМИКИ ДВУХКАНАЛЬНОЙ СИСТЕМЫ НАВЕДЕНИЯ
СКОМПЕНСИРУЮЩИМИ СВЯЗЯМИ
3.1.Общее выражение среднего квадрата динамической ошибки
Ошибка ДСН имеет вид |
|
2 (t) 2 (t) a2 (t). |
(50) |
Выражение (50) справедливо при условии связи между собой управляющих воздействий грубого и точного каналов, например через параллактическое смещение (48). Ошибку можно представить
в виде двух составляющих – детерминированной 2DET и центрированной случайной 2RAN :
30