

Теория электропривода учебное пособие
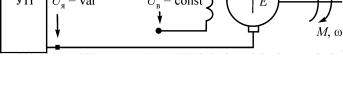
..pdfРис. 4.5. Схема включения сопротивлений в цепь якоря
Написав аналогичные выражения для скоростей при переходе со 2-й на 3-ю и т.д. реостатные характеристики, получим ряд равенств:
I2 Rя = I1 R1,
I2 R1 = I1 R2 ,
……………….
I2 Rm−2 = I1 Rm−1,
I2 Rm−1 = I1 Rm.
Перемножая правые и левые части и сокращая общие
множители, получим I2m Rя = I1m Rm.
Это означает, что при правильно рассчитанной пусковой
диаграмме |
имеют |
место соотношения |
|
I2 |
= |
Rm |
= |
Rm−1 |
= |
|||||||||
|
I |
R |
R |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
m−1 |
|
m−2 |
|
|
=.... = |
R 2 |
= |
R1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
я |
|
|
|
|
|
|
|
|
|
|
|
||||
|
Обозначив отношение токов |
I2 |
|
через |
λ, |
получим |
||||||||||||
|
I1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
λm = |
|
Rm |
|
или λ = m |
Rm |
. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
R |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|||
|
|
|
я |
|
|
|
я |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
81 |

При заданной кратности пусковых токов λ (или момен-
|
|
|
lg |
Rm |
|
|
|
тов) число пусковых ступеней будет m = |
R |
||||||
|
|||||||
|
я |
. |
|||||
|
|
||||||
|
|
|
lg λ |
||||
Для расчета пусковых сопротивлений по допустимому |
|||||||
пусковому току определяют Rm = |
Uн |
, |
задаются величиной |
||||
|
|||||||
|
Iя.доп |
|
|
|
|
||
λ и находят m. Если m получается дробным, его округляют до
целого числа и находят новое значение λ = m Rm . Тогда пол-
Rя
ные сопротивления на каждой ступени будут выражены как
R1 =λ Rя,
R2 = λ R1 = λ2 Rя,
……………………….
Rm−1 = Rm−2 λ = λm−1 Rя, Rm = Rm λ = λm Rя.
Величины сопротивлений, отключаемых на каждой ступени, находятся как разности полных пусковых сопротивлений ступеней:
Rд1 = Rя λ−Rя = Rя (λ−1),
Rд2 = Rя λ2 − Rя λ = Rя λ (λ −1),
……………………………………….
Rm = Rя λm − Rя λm−1 = Rя λm−1 (λ −1).
82
4.2.4. Регулирование частоты вращения ДПТ НВ изменением напряжения на якоре
Схема включения двигателя для этого способа регулирования приведена на рис. 4.6. В данном случае для регулирования частоты вращения ДПТ НВ необходим регулируемый источник напряжения, например управляемый преобразователь (УП). Обмотка возбуждения подключается к независимому нерегулируемому преобразователю. Регулирование ω ведется при номинальном потоке возбуждения
Ф = Фн.
Из уравнений механической и электромеханической характеристик видно, что с регулированием напряжения связано изменение скорости идеального холостого хода (первое слагаемое в уравнениях (4.5) и (4.6)). Жесткости искусственных характеристик при изменении напряжения питания якоря сохраняются равными значению жесткости естественной
характеристики β = |
(k Ф)2 |
, поскольку Ф = Фн и сопротив- |
|
R |
|||
|
|
||
|
я |
|
ление якорной цепи остается неизменным.
Рис. 4.6. Схема регулирования частоты вращения ДПТ НВ изменением напряжения питания
Второй член в уравнениях электромеханической (4.5) и механической (4.6) характеристик определяет падение скорости ∆ω под нагрузкой.
83
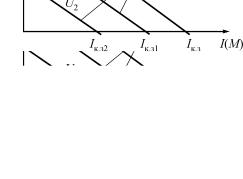
Регулирование частоты вращения идет вниз от основной скорости. Характеристики с одинаковыми жесткостями при различных значениях напряжения на якоре располагаются взаимно параллельно (рис. 4.7).
Рис. 4.7. Характеристики при изменении напряжения якоря
Данный способ регулирования за счет высокого диапазона регулирования является основным способом регулирования частоты вращения в широкорегулируемых приводах.
Для рассматриваемого способа регулирования длительно допустимый ток якоря двигателя и, соответственно, момент ограничены номинальными значениями, т.е. регулирование ω изменением напряжения на якоре осуществляется при постоянном допустимом моменте. Длительно допустимая мощность при номинальной угловой скорости равна номинальной и снижается по мере уменьшения скорости:
P= Mн · ω.
Сучетом отмеченных особенностей этот способ регули-
рования угловой скорости целесообразно использовать для механизмов, момент сопротивления которых остается постоянным при изменении скорости.
84
4.2.5. Регулирование частоты вращения ДПТ НВ изменением магнитного потока
Для обеспечения оптимальных условий работы некоторых производственных механизмов в соответствии с требованиями технологического процесса иногда возникает необходимость повышения рабочей скорости выше основной.
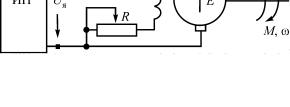
Схема подключения двигателя для рассматриваемого способа отличается от предыдущей тем, что обмотка вожбуждения двигателя подключена к управляемому преобразователю, с помощью которого изменяется напряжение возбуждения и, соответственно, магнитный поток Ф, а якорь двигателя подключается к неуправляемому источнику постоянного напряжения. В иных случаях обмотка возбуждения подключается к неуправляемому преобразователю или сети постоянного тока через реостат R, с помощью которого регулируют ток возбуждения и магнитный поток (рис. 4.8).
Рис. 4.8. Схема включения ДПТ НВ для изменения магнитного потока
Для анализа удобно воспользоваться уравнениями электромеханической и механической характеристик (4.5), (4.6) с учетом, что напряжение на якоре остается номинальным, а добавочное сопротивление в цепи якоря равно нулю:
ω = |
Uн |
− |
Rя |
I |
, |
(4.11) |
|
k Ф |
k Ф |
||||||
|
|
я |
|
|
|||
|
|
|
|
|
|
85 |
ω= |
Uн |
− |
Rя |
М. |
(4.12) |
|
k Ф |
(k Ф)2 |
|||||
|
|
|
|
Несложно заметить, что угловая скорость на холостом ходу (первый член уравнений) при уменьшении магнитного потока Ф увеличивается, что позволяет получить характеристики, расположенные выше естественной (рис. 4.9).
а |
б |
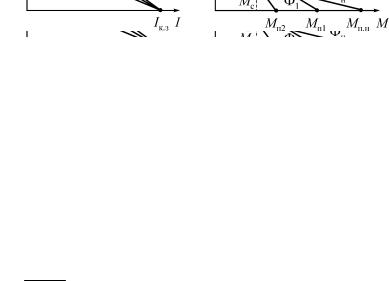
Рис. 4.9. Электромеханическая (а) и механическая (б) характеристики ДПТ НВ при изменении потока возбуждения
Наряду с этим ослабление потока вызывает одновременно уменьшение жесткости механических характеристик
β = k2 Ф2 . В результате меньшей жесткости характеристик
Rя
будет иметь место и большее падение скорости при одном и том же значении Мс.
Из (4.11) следует, что при пуске двигателя в ход, т.е. при ω = 0, ток якоря не зависит от Ф, а определяется лишь вели-
чиной U и Rя: Iя = Iк.з = U . Следовательно, характеристики
Rя
ω= f (Iя ) для всех значений Ф пересекаются в одной точке на оси абсцисс и имеют вид, изображенный на рис. 4.9, a.
86
Механические характеристики для уменьшенных значений Ф приведены на рис. 4.9, б.
Как видно, точки пересечения механических характеристик на оси абсцисс не совпадают, т.е. пусковые моменты при снижении магнитного потока снижаются, так как при
ω = 0 из (4.12) следует Мп = |
U k Ф = Iк.з k Ф. |
|
Rя |
При этом при моментах, соответствующих значениям слева от точек пересечения, скорость двигателя возрастает, а при нагрузках, соответствующих значениям справа от точек пересечения, скорость уменьшается. Это явление называется опрокидыванием регулирования. Причиной является то, что при Мс = const ослабление Ф влияет на скорость в двух направлениях одновременно. С одной стороны, оно вызывает увеличение скорости, с другой – обусловливает ее снижение вследствие увеличения падения напряжения из-за роста тока (последний растет из-за уменьшения ЭДС). В точках пересечения характеристик оба этих фактора уравновешивают друг друга, и, несмотря на ослабление потока, скорость не изменяется. Более того, как показано на рис. 4.9, б, при снижении потока от номинального до Ф1 скорость возрастает до значения в точке 2, а при дальнейшем ослаблении до Ф2 скорость падает (т. 1).
Поскольку допустимая нагрузка двигателя ограничена номинальным значением тока якоря, предельно допустимый момент двигателя для этого способа регулирования M = = k · Ф · Iя.н снижается пропорционально уменьшению магнитного потока. Тогда предельно допустимая мощность остается постоянной: P = M · ω = const. С учетом этого говорят, что регулирование угловой скорости ослаблением магнитно-
го потока ведется при постоянной допустимой мощности.
Рассматриваемый способ регулирования достаточно удобен и экономичен, так как мощность в цепи возбуждения
87
двигателя значительно меньше, чем в цепи якоря. Диапазон регулирования D изменением магнитного потока сравнительно небольшой (4–5) и ограничивается коммутационной способностью двигателя.
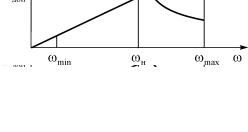
Особенности регулирования частоты вращения изменением напряжения на якоре и ослаблением магнитного потока поясняются рис. 4.10. Регулирование изменением напряжения на якоре принято называть первой зоной регулирования, изменением магнитного потока – второй зоной.
Рис. 4.10. Зоны регулирования скорости
В первой зоне частотавращения регулируется в сторону уменьшения от номинальной, допустимый момент двигателя остается постоянным, а допустимая мощность снижается пропорционально уменьшению ω.
Во второй зоне ω регулируется в сторону увеличения от номинальной, при этом допустимая мощность остается постоянной, а допустимый момент снижается.
4.2.6. Тормозные режимы ДПТ НВ
Выше была рассмотрена работа ДПТ НВ в двигательном режиме, когда электрическая энергия, потребляемая от сети, преобразуется в механическую. Характеристики, соответствующие двигательному режиму, располагаются в первом или
88
втором квадрантах в зависимости от направления вращения
(см. рис. 4.2).
Для быстрой и точной остановки механизмов или изменения направления вращения в современных приводах широко используются тормозные режимы работы электродвигателей.
Для изменения направления вращения ДПТ НВ нужно изменить направление действия момента, чего можно достичь изменением направления Iя или Ф, как следует из выражения M = k ϕ Iя. Обычно это осуществляется изменением
направления Iя, так как изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф наведется большая ЭДС самоиндукции, которая может вызвать «пробой» изоляции.
Для ДПТ НВ характерны три вида электрического торможения:
1.Генераторное (рекуперативное) торможение.
2.Динамическое торможение.
3.Торможение противовключением.
4.2.6.1. Генераторное торможение с отдачей энергии в сеть
Если скорость двигателя оказывается выше скорости идеального холостого хода ω (рис. 4.11), то ЭДС машины становится больше напряжения сети и ток якоря, как следует
из уравнения Iя = Uя − Е , становится отрицательным. Сле-
Rя
довательно, меняется и знак момента – он становится тормозным. Механическая энергия, поступающая со стороны вала двигателя, преобразуется в электрическую и отдается в сеть. Способ является весьма экономичным.
89

Рис. 4.11. Механические характеристики в режимах генераторного торможения и противовключения
Умножив уравнение электрического равновесия для режима рекуперативного торможения U = (–I) · Rя + Е на ток якоря с учетом его знака (I < 0), получим
U · (–I) = I2 · Rя + Е · (–I). |
(4.13) |
Тогда баланс мощностей примет вид |
|
–Р1 = ∆Р – Р2, |
(4.14) |
где P1 < 0 означает, что механическая мощность после электромеханического преобразования энергии возвращается в сеть в виде электрической мощности;
Р2 < 0 означает, что к валу двигателя подводится внешняя механическая мощность.
В режим рекуперативного торможения двигатель попадает, например, при ступенчатом снижении питающего напряжения на обмотке якоря ДПТ НВ. При уменьшении напряжения снижается новое значение скорости идеального холостого хода. Значение ЭДС вращающегося якоря со ско-
90