

Электрические машины конспект лекций
..pdf15.3. Регулирование активной мощности
После включения генератора в сеть его напряжение U становится равным напряжению сети Uñ. По отношению к внешней нагрузке напряжения U è Uñ совпадают по фазе, а по контуру
«генератор — сеть» находятся в противофазе, т. е. U U ñ (ðèñ. 15.2, a). При точном выполнении указанных трех условий, необходимых для синхронизации генератора, его ток Ià после подключения машины к сети будет равен нулю.
Посмотрим, какими способами можно регулировать ток Ià при работе генератора параллельно с сетью, на примере неявнополюсного генератора.
Ток, проходящий по обмотке якоря неявнополюсного генератора, можно определить из уравнения (14.4, á):
|
|
|
I a |
E |
0 U |
|
jX ñí |
|
|
|
|
|
|
|
|
|
j |
E |
0 |
U |
. |
(15.1) |
|
|
|
|||
X ñí
Òàê êàê U U ñ const, то величину тока Ià можно изменять только двумя способами: изменяя ЭДС E0 по величине или по фазе.
Если к валу генератора приложить внешний момент, больший момента, необходимого для компенсации магнитных потерь мощности в стали и механических потерь, то ротор приоб-
ретает ускорение, вследствие чего вектор E 0 смещается относи-
тельно вектора U на некоторый угол в направлении вращения векторов (рис. 15.2, á). При этом возникает разность векторов
|
|
|
E |
0 |
U, приводящая согласно (15.1) к появлению тока Ià. Вектор |
этого тока опережает на 90° вектор jI a X ñí и сдвинут относи-
тельно вектораU на некоторый угол , меньший 90°. При работе в рассматриваемом режиме генератор отдает в сеть активную мощность P mUI a cos , и на вал его действует электромагнитный тормозной момент, который уравновешивает вращающий момент первичного двигателя, вследствие чего частота вращения ротора остается неизменной. Чем больше внешний момент, приложенный к валу генератора, тем больше угол , а следовательно, ток и мощность, отдаваемые генератором в сеть.
181
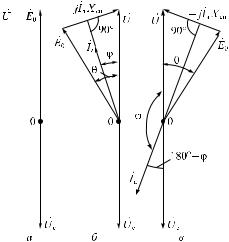
Если к валу ротора приложить внешний тормозной момент,
то вектор E0 будет отставать от вектора напряжения U íà óãîë (ðèñ. 15.2, â). При этом возникает ток I a , вектор которого опережает на 90° вектор jI a X ñí и сдвинут на некоторый угол относи-
тельно вектора напряженияU. Так как угол 90 , активная со-
ставляющая тока находится в противофазе с напряжением генератора. Следовательно, в рассматриваемом режиме активная мощность P mUI a cos забирается из сети, и машина работает двигателем, создавая электромагнитный вращающий момент, который уравновешивает внешний тормозной момент; частота вращения ротора при этом снова остается неизменной.
Рис. 15.2. Упрощенные векторные диаграммы неявнополюсной машины при параллельной работе с сетью
Таким образом, для увеличения нагрузки генератора необходимо увеличивать приложенный к его валу внешний момент
(т. е. вращающий момент первичного двигателя), а для уменьшения нагрузки — уменьшать этот момент. При изменении направления внешнего момента (если вал ротора не вращать, а тормозить) машина автоматически переходит из генераторного в двигательный режим.
182
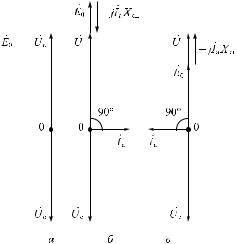
15.4. Регулирование реактивной мощности
Если в машине, подключенной к сети и работающей в режиме холостого хода (рис. 15.3, à) увеличить ток возбуждения Iâ, то возрастет ЭДС E0 (ðèñ. 15.3, á), и по обмотке якоря будет проходить ток Ia, величина которого согласно (15.1) определяется только индуктивным сопротивлением Xñí машины. Следовательно, ток I a будет реактивным: он отстает по фазе от напряжения U
на угол 90° или опережает на тот же угол напряжение сети U ñ . При уменьшении тока возбуждения ток Ia изменит свое направ-
ление: он будет опережать на 90° напряжение U (ðèñ. 15.3, â) è
отставать на 90° от напряжения U ñ . Таким образом, при изменении тока возбуждения изменяется лишь реактивная составляющая тока Ia, т. е. реактивная мощность машины Q. Активная составляющая тока Ia в рассматриваемых случаях равна нулю. Следовательно, активная мощность P 0, и машина работает в режиме холостого хода.
При работе машины под нагрузкой имеют место те же условия: при изменении тока возбуждения изменяется лишь реактивная составляющая тока Ia, т. е. реактивная мощность машины Q. Режим возбуждения, при котором реактивная составляющая тока Ia равна нулю, называют режимом полного, или нормального, возбуждения.
Если ток возбуждения Iâ больше тока Iâ.ï, при котором имеет место режим полного возбуждения, то ток Ia содержит отстающую от U реактивную составляющую, что соответствует активно-индуктив- ной нагрузке генератора. Такой режим называют режимом перевозбуждения. Если ток возбуждения Iâ меньше тока Iâ.ï, òî òîê Ia содержит реактивную составляющую, опережающею напряжение U, что соответствует активно-емкостной нагрузке генератора. Такой режим называют режимом недовозбуждения.
Перевозбужденная синхронная машина, работающая в режиме холостого хода, по отношению к сети эквивалентна емкости. Такую машину называют синхронным компенсатором и используют для повышения коэффициента мощности электриче- ских установок и стабилизации напряж¸ния в электрических сетях. Недовозбужденная синхронная машина, работающая в режиме холостого хода, по отношению к сети эквивалентна индуктивности.
183
Возникновение реактивной составляющей тока Ia физически объясняется тем, что при работе синхронной машины на сеть бесконечно большой мощности суммарный магнитный поток, сцеп-
#
ленный с каждой из фаз, ðåç â a , не зависит от тока возбуждения и при всех условиях остается неизменным, так как
|
|
|
|
U E |
0 |
E a E |
a U ñ const. |
Рис. 15.3. Упрощенные векторные диаграммы неявнополюсной синхронной машины при параллельной работе с сетью и отсутствии активной нагрузки
Следовательно, если ток возбуждения Iâ (т. е. поток Фâ è ÝÄÑ E0) больше тока, требуемого для полного возбуждения, то возникает отстающая составляющая тока Ia, которая создает размагничивающий поток реакции якоря Фa; åñëè òîê Iâ меньше тока, необходимого для полного возбуждения, то возникает опережающая составляющая тока Ia, которая создает подмагни- чивающий поток реакции якоря Фa. Во всех случаях суммарный поток машины # автоматически поддерживается неизменным.
184
ВОПРОСЫ
15.4.1.Что такое синхронизация генератора, включаемого на параллельную работу?
15.4.2.Как нагрузить генератор, включенный на параллельную работу?
15.4.3.Почему с появлением тока нагрузки в цепи статора генератора приводной двигатель получает механическую нагрузку?
15.4.4.Назовите два способа синхронизации и поясните, когда они применяются.
15.4.5.Назовите условия точной синхронизации и обоснуйте необходимость выполнения этих условий.
15.4.6.Назовите условия самосинхронизации и обоснуйте необходимость выполнения этих условий.

Лекция 16
МОЩНОСТЬ И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
16.1. Электромагнитная мощность и электромагнитный момент
Активная мощность. Чтобы установить, как зависит активная мощность Ð синхронной машины от угла нагрузки , рассмотрим упрощенные векторные диаграммы, построенные при Ra 0. Из диаграммы, приведенной на рис. 16.1, à для неявнополюсной машины, можно установить, что общая сторона треугольников OAB è ÀÑÂ
AB OA sin AC cos ,
или, с учетом модулей соответствующих векторов, |
|
||
E 0 sin I a X ñí cos . |
(16.1) |
||
Следовательно, активная мощность машины |
|
||
P mUI a cos |
mUE 0 |
sin Pýì . |
(16.2) |
|
|||
|
X ñí |
|
|
Векторная диаграмма для явнополюсной машины приведена на рис. 16.1, á. Так как , то активная мощность
P mUI a cos
mU I a sin sin I a cos cos |
(16.3) |
|
|
mU I d sin I q cos , |
|
P Pýì . |
|
186
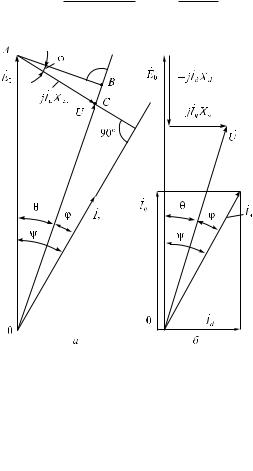
Чтобы определить токи Id è Iq, спроектируем модули векто-
|
|
|
|
è |
ðîâ ÝÄÑ E 0 |
, напряжения U, |
падений напряжения jI d X d |
|
|
|
|
|
|
|
jI q X q на оси, параллельную и перпендикулярную вектору |
E |
0 |
||
(ñì. ðèñ. 16.1, á). Тогда получим
E 0 |
U cos I d X d; |
U sin I q X q , |
|
откуда |
|
|
|
|
I d E 0 U cos ; I q U sin . |
(16.4) |
|
|
X d |
X q |
|
Рис. 16.1. Упрощенные векторные диаграммы неявнополюсного и явнополюсного синхронного генера-
|
|
òîðà |
|
|
|
|
Подставляя значения Id è Iq в (16.3), получим |
|
|||||
|
U cos |
|
U sin |
|
|
|
E 0 |
|
|
|
|||
Pýì mU |
|
|
sin |
|
cos , |
|
|
|
|
||||
|
X d |
|
X q |
|
|
|
|
|
|
|
|||
187

или, используя формулу sin 2 2sin cos , |
|
|||||||||
|
mUE 0 |
|
mU |
2 |
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
||||
Pýì |
|
sin |
|
|
|
|
|
|
sin 2. |
(16.5) |
|
|
|
|
|
||||||
|
X d |
|
2 |
|
|
|
|
|
|
|
|
|
|
X q |
|
X d |
|
||||
Электромагнитный момент. В синхронных машинах большой и средней мощности потери мощности в обмотке якоряPà.ýë mI à2 Rà малы по сравнению с электрической мощностью P, отдаваемой (в генераторе) или потребляемой (в двигателе) обмоткой якоря. Следовательно, если пренебречь величинойPà.ýë , то можно считать, что электромагнитная мощность машины Pýì P.
Электромагнитный момент пропорционален мощности Pýì, поэтому для неявнополюсной и явнополюсной машин соответственно запишем
Mýì Pýì
1
M ýì |
|
Pýì |
|
mUE 0 |
|
sin , |
(16.6) |
||||||
|
|
|
|||||||||||
|
|
|
1 1 X ñí |
|
|
|
|
|
|
||||
|
mUE 0 |
|
|
|
|
mU |
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
|
sin |
|
|
|
|
|
|
|
sin 2. (16.7) |
||
|
|
|
|
|
|
|
|||||||
|
1 X d |
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
X q |
|
X d |
|||||
При неявнополюсной машине зависимость M f ïðåä-
ставляет собой синусоиду, симметричную относительно осей координат (рис. 16.2, кривая 1). При явнополюсной машине из-за неодинаковой магнитной проводимости по различным осямX d X q возникает реактивный момент
|
mU |
2 |
|
1 |
|
|
|
||
M p |
|
|
|
|
|
|
|
||
|
21 |
|
|
|
|
X q |
|||
|
|
|
|
|
1 |
|
|
|
|
|
(16.8) |
|
sin 2. |
||
|
X d |
|
|
Он появляется в результате стремления ротора ориентироваться по оси результирующего поля, что несколько искажает синусоидальную зависимость M f (кривая 2). Реактивный
момент возникает даже при отсутствии тока возбуждения (когда E 0 0); он пропорционален sin 2 (кривая 3). Кривые M f
è Pýì f называют угловыми характеристиками.
188

ВОПРОСЫ
16.1.1.Зависит ли максимальная электромагнитная мощность синхронной машины от тока ротора?
а) зависит; б) не зависит.
16.1.2.Зависит ли максимальный электромагнитный момент синхронной машины от частоты?
а) зависит; б) не зависит.
16.1.3.Что такое коэффициент статической перегружаемости?
Рис. 16.2. Угловые характеристики яв- |
нополюсной и неявнополюсной ма- |
øèí |
16.2. Статическая устойчивость синхронной машины
Условия статической устойчивости. Угловая характеристика синхронной машины имеет важное значение для оценки статической устойчи- вости и степени перегружаемости. Под статической устойчивостью синхронной машины, работающей параллельно с сетью, понимают ее способность сохранять синхронное вращение (т. е. условие n2 n1 ) при изменении внешнего вращающего или тормозного момента Mâí, приложенного к ее валу. Стати-
Рис. 16.3. Картина взаимодействия потоков Фâ è # в синхронной машине
189
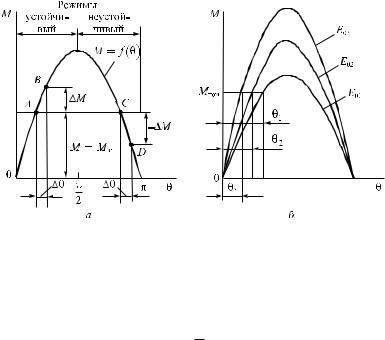
ческая устойчивость обеспечивается только при углах , соответствующих M M ìàêñ .
Допустим, что синхронный генератор работает при некотором внешнем моменте Mâí, передаваемом его ротору от первич- ного двигателя. При этом ось полюсов ротора сдвинута на некоторый угол относительно оси суммарного потока # , и машина развивает электромагнитный момент M, который можно считать равным Mâí (точки À è Ñ íà ðèñ. 16.4, à). Если момент Mâí возрастает, то ротор генератора ускоряется, что приводит к увеличению угла до значения . При работе машины в точ- ке À возрастание угла вызывает увеличение электромагнитного момента до величины M M (точка B); в результате равновесие моментов, действующих на вал ротора, восстанавливается, и машина после некоторого колебательного процесса продолжает работать с синхронной частотой вращения.
Рис. 16.4. Угловые характеристики при различных значениях E0
Аналогичный процесс имеет место и при уменьшении Mâí, при этом соответственно уменьшаются угол и момент Ì, а следовательно, равновесие моментов также восстанавливается. Од-
нако если машина работает при (точка Ñ), то увеличе- 2
ние угла вызывает уменьшение электромагнитного момента до
190