

Системы управления исполнительными механизмами
..pdfВ представленной на рис. 5.10 схеме предусмотрено также ручное управление запорной арматурой.
Некоторые ИМ постоянной скорости, например фирмы KROMSHCRODER (Германия), могут управляться как сигналами напряжения или тока, так и от подключаемого к определенным входным клеммам потенциометра. Преобразование непрерывного аналогового сигнала тока управления 4–20 мА в импульсные команды управления осуществляется специальным преобразователем, установленным непосредственно в исполнительном механизме. Поскольку в этом случае напряжение питания 220 В частотой 50 Гц всегда присутствует на механизме, пост ручного управления в этой модификации механизмов устанавливается стационарно и обеспечивает управление механизмом «по месту» в обход электронной схемы управления. При управлении исполнительными механизмами такого типа может успешно применяться быстродействующий микропроцессорный универсальный ПИД-регулятор типа «МЕТАКОН 515-З1-У-x», который благодаря встроенному источнику напряжения и активному токовому выходу позволяет минимизировать всю схему измерения и управления, обеспечивая при этом высокое качество и высокую надежность контура управления.
5.3.Системы стабилизации технологических координат
Ксистемам стабилизации относятся прежде всего системы управления с непрерывным технологическим процессом (непрерывные прокатные станы, бумагоделательные машины, системы отопления и горячего водоснабжения и др.). Требования к системам стабилизации формулируются в отношении выходной координаты в статике и в динамике.
В статике, т.е. в установившихся (квазиустановившихся) режимах функционирования систем стабилизации, можно сформулировать два основных тесно взаимосвязанных требования:
1) обеспечение статической точности регулирования выходной координаты при действии возмущений внешней среды;
161
2) обеспечение диапазона регулирования выходной координаты с заданной статической точностью.
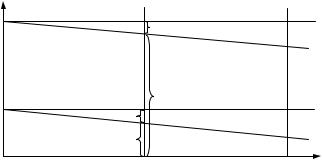
Типичным примером стабилизируемой координаты в СУИМ является линейная или угловая скорость движения рабочего органа. На рис. 5.11 приведены статические (механические) характеристики электропривода постоянного тока, регулируемого по цепи якоря.
Из рассмотрения механических характеристик следует, что абсолютная величина статической ошибки стабилизации скорости ∆ c зависит не от скорости холостого хода ( 0, 0), а от момента нагрузки на валу электропривода, поэтому оценку статической ошибки производят для некоторого среднего или номинального момента нагрузки. Зададимся диапазоном изменения нагрузки от Mmin = 0 до Mmax, тогда Mср (среднее значение момента нагрузки) = =Mср = 1/2(Mmin + Mmax).
|
|
|
0 |
|
∆ c |
|
|
|
0 |
|
р= max |
∆ c |
|
|
0 |
р= min |
M |
|
||
Mmin |
Mср |
Mmax |
Рис. 5.11. Механическая характеристика электропривода постоянного тока
Абсолютная величина статической ошибки стабилизации скорости ∆ c рассчитывается по формуле
∆ c = 0 – р,
где р – рабочая скорость электропривода.
162
Относительная величина статической ошибки
c c / p 100 %.
Заметим, что величина относительной статической ошибки стабилизации скорости возрастает с уменьшением рабочей скорости.
Диапазон изменения любой координаты САУ всегда ограничен, в частности для систем стабилизации скорости он фактически не превышает 100 000. Диапазон стабилизируемых скоростей можно оценить следующим образом:
D = max – min – абсолютная оценка, δD = max/ min – относительная оценка.
В отношении диапазона регулирования скорости электропривода системы стабилизации можно условно подразделить на следующие:
–малого диапазона (δD 10);
–среднего диапазона (10 > δD 100);
–широкого диапазона (δD > 100).
Требования статической точности c и диапазона δD регулирования скорости тесно взаимосвязаны:
c доп c D 100 %.
max
Очевидно, что если требование к статической точности будет удовлетворено внизу заданного диапазона стабилизируемой координаты (при min в рассматриваемом примере), то тем более оно будет удовлетворено вверху заданного диапазона.
Статическая ошибка в системе стабилизации некоторой координаты теоретически может быть сведена к нулю за счет:
–включения интегральной составляющей в закон регулирования этой координаты (интегратора в структуру регулятора);
–компенсации возмущений (создания инвариантной системы
вотношении возмущений);
163
–реализации скользящего режима во внешнем контуре (релейного закона управления с большой частотой переключения ре-
ле) [13, 14].
Система управления в этом случае становится астатической по отношению к возмущающим воздействиям, и ее квазиустановившийся режим работы характеризуется отсутствием статической ошибки регулирования.
В динамике, т.е. в режимах отработки системой изменений задающих и возмущающих воздействий внешней среды к системе стабилизации, могут предъявляться следующие требования:
1) в частотной области:
–обеспечение требуемой полосы пропускания замкнутого контура или частоты среза разомкнутого контура регулирования;
–обеспечение требуемых запасов по амплитуде и фазе лога-
рифмической частотной характеристики ( L, ); 2) во временной области:
– обеспечение динамической точности стабилизации выходной координаты xвых(t);
–обеспечение быстродействия отработки ошибок регулирования при изменении задающих и возмущающих воздействий (с);
–обеспечение требования к допустимому перерегулированию
(%), колебательности выходной координаты xвых(t) (число колебаний) и т.п.
Динамическую точность систем стабилизации оценивают по
величине максимального отклонения xmax или по величине среднеквадратичного отклонения xск по отношению к заданному значению выходной координаты (%). Вторая оценка полнее характеризует точность системы, так как основана на статистических характеристиках системы.
В идеальном случае динамическая погрешность отработки сигнала задания в СУИМ должна быть равна нулю. На самом деле ограничения, накладываемые на ресурсы управления, вынуждают искать некий компромисс, в частности между временем регулирования и перерегулированием выходной координаты. При этом наиболее часто прибегают к одному из следующих подходов.
164
Форсирование управляющего воздействия
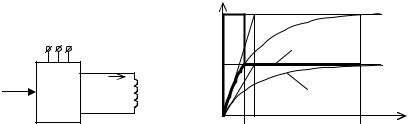
Этот способ позволяет очень эффективно снизить динамическую ошибку регулирования какой-либо координаты в простейших системах. В качестве примера рассмотрим процесс регулирования тока возбуждения генератора постоянного тока. На рис. 5.12 приведены функциональная схема (а) объекта управления и переходные процессы (б) напряжения и тока возбуждения без форсирования и с форсированием управляющего воздействия. Тиристорный возбудитель (ТВ) представлен безынерционным звеном, цепь тока возбуждения – апериодическим звеном первого порядка. Эквивалентная постоянная времени цепи возбуждения принята равной Твг.
|
|
|
|
2i* |
|
|
|
|
|
|
вг |
|
|
|
380 В |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
iвг |
|
|
i* |
|
|
|
|
|
|
|
|
|
Uу |
|
|
|
вг |
|
|
ТВ |
Uвг |
iвг |
овг |
|
1 |
|
|
|
|||||
|
|
|
|
0 |
Твг |
t |
|
|
|
|
tрег 1 |
tрег 2 |
|
|
|
|
|
|
||
|
|
а |
|
|
|
б |
Рис. 5.12. К оценке эффективности форсирования управляющего воздействия
Кривая 1 – реакция тока возбуждения на ступенчатое задающее воздействие без форсировки управляющего водействия, кривая 2 – реакция тока возбуждения на то же самое задающее воздействие с двукратной форсировкой управляющего воздействия.
Форсировка осуществляется кратковременно на время tрег1, при котором ток возбуждения достигает заданного значения. Заметим, что форсирование сигнала управления позволяет существенно снизить время регулирования и уменьшить динамическую ошибку регулирования, однако это далеко не всегда осуществимо.
165

В частности, в рассмотренном примере тиристорный возбудитель для реализации двукратной форсировки должен иметь соответствующий запас по напряжению. К недостаткам этого метода следует также отнести необходимость применения нелинейных элементов системы управления (релейного элемента и компаратора).
Компенсация больших постоянных времени объекта управления
Выполняется после структурно-параметрической декомпозиции объекта управления. Допустим, в результате структурной декомпозиции объекта управления выделен подобъект, структурная схема которого приведена на рис. 5.13.
Этот объект управления содержит два апериодических звена первого порядка с большими постоянными времени (БПВ) T1 и T2 и n звеньев с малыми постоянными времени (МПВ) 1– n, причем
i << T1, T2, i = 1…n.
Uу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
1 |
|
|
… |
|
1 |
|
|
|
K |
|
|
K2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1Р 1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
n Р 1 |
|
|
|
|
|
T Р 1 |
|
||||||
|
|
|
|
|
|
|
|
T Р 1 |
|
|
|
|
||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
||
Рис. 5.13. Структурная схема объекта управления
Учитывая, что произведением МПВ можно пренебречь, запишем выражение для эквивалентной МПВ:
n
T i .
i 1
Эту постоянную времени часто называют некомпенсированной малой постоянной времени, поскольку, во-первых, компенсации подлежат только БПВ; во-вторых, любая технически реализуемая система после компенсации всех БПВ все равно будет обладать некоторой инерцией, и именно эта некомпенсированная МПВ будет определять быстродействие системы.
166

Таким образом, параметрическая декомпозиция ОУ приводит к замене всех звеньев с МПВ одним эквивалентным звеном:
W P T P1 1.
Установим на входе ОУ компенсирующее (корректирующее) ПИД звено:
W P T1P 1 T2 P 1 . T3P
Тогда передаточная функция объекта управления со звеном компенсации (разомкнутого контура регулирования)
Wраз P |
K1K2 |
|
. |
|
T3P T P |
1 |
|||
|
|
Как видим, ОУ существенно упростился, стал более быстродействующим, и синтез оптимального управления им уже не представляет проблемы (см. главу 6).
Заметим, что все сказанное справедливо лишь в случае идеальной компенсации БПВ объекта управления. В действительности параметры ОУ всегда рассчитываются (оцениваются) с некоторой погрешностью, при функционировании СУИМ ее элементы претерпевают температурные, временные и прочие изменения. Все это приводит к недокомпенсации или перекомпенсации БПВ и, как следствие, к снижению эффекта от компенсации. Кроме того, компенсация довольно больших постоянных времени требует соответствующих затрат энергии, а реальные ограничения, накладываемые на энергетические ресурсы, приводят к сужению зоны малых отклонений координат ОУ, т.е. к нелинейности СУИМ. Тем не менее данный метод улучшения динамических показателей широко применяется в сочетании с процедурами синтеза оптимальных систем управления.
167
5.4. Системы программного управления, ограничение координат СУИМ
Ксистемам программного управления относятся системы, задающие воздействия которых меняются по некоторым программ- но-временным законам. В частности, это системы управления металлорежущими станками и промышленными роботами, исполнительные органы (струбцины резцов станка, схваты манипулятора
ит.п.) которых имеют программные законы движения по одной или нескольким пространственным координатам. Программное управление такого рода СУИМ осуществляют, как правило, с помощью систем числового программного управления (СЧПУ) того или иного класса (NC, CNC, SNC, DNC и др.) [17, 23, 24].
Ксистемам программного управления предъявляются те же требования, что и к системам стабилизации в статических и динамических режимах, а также ряд специфических требований, связанных с необходимостью ограничения координат объекта управления на допустимых уровнях. В отличие от систем стабилизации СЧПУ при позиционном и позиционно-контурном управлении могут функционировать в режимах больших отклонений координат, в том числе при больших отклонениях выходной координаты (положения исполнительного органа). В этой связи основные требования к программным системам управления можно сформулировать следующим образом:
–максимум быстродействия при минимуме динамической ошибки отработки любых программно-задающих воздействий;
–ограничение координат СУИМ на допустимых уровнях во всех динамических режимах.
Эти требования тесно взаимосвязаны и обеспечиваются следующими техническими (в общем случае – программно-аппарат- ными) средствами:
–применением дополнительных нелинейных обратных связей по ограничиваемым координатам СУИМ (типа отсечек);
–применением задатчиков интенсивности (первого или второго рода);
168
–формированием таких программно-временных задающих воздействий, которые учитывают реальные динамические характеристики (возможности) объекта управления;
–ограничением величин задающих воздействий внутренних контуров регулирования в многоконтурных СУИМ.
В электромеханических СУИМ требуется ограничивать на допустимых уровнях, в частности, следующие координаты:
–скорость электродвигателя ( max);
–ток якоря двигателя постоянного тока (iя iя max, iя max = iя ном, где – перегрузочная способность двигателя) или ток статора
асинхронного двигателя с короткозамкнутым ротором (ic ic max);
–скорость изменения тока якоря двигателя на допустимом уровне; для электрических машин обычного исполнения эта величина составляет 20–50 номинальных значений тока за секунду;
–ускорение электропривода (исполнительного механизма, рабочего органа) на уровне, определяемом требованиями технологического процесса, комфортности и др.
Рассмотрим ограничение координат СУИМ применением дополнительных нелинейных обратных связей.
На рис. 5.14 приведена функциональная схема системы регулирования скорости электропривода постоянного тока с дополнительной обратной связью типа «отсечка» по току.
Uзс |
|
Uрс |
Регулятор |
||
– |
скорости |
– |
Uу |
Тиристорный |
Двигатель |
|
|
|
||
|
преобразователь |
постоянного тока |
|
Uнз –Uотс |
Uдт |
iя |
Датчик тока |
||
Uотс |
|
якоря |
Нелинейное звено Uдс |
|
Датчик |
|
|
скорости |
|
|
Рис. 5.14. Функциональная схема САР скорости с отсечкой по току якоря
Нелинейная обратная связь по току якоря вступает в действие, когда ток якоря превысит максимально допустимое значение.
169
При этом реализуется условие Uдт > Uотс , где Uотс – напряжение отсечки нелинейного звена. Напряжение отрицательной обратной связи Uнз приводит к снижению напряжения управления силового преобразователя и cтабилизирует ток якоря на максимально допустимом уровне. В режиме токоограничения среднее значение
Uдт Uотс.
Заметим, что регулятор скорости, обеспечивающий оптимальное в смысле какого-либо критерия регулирование скорости, должен иметь переменную структуру, изменяющуюся при выходе тока на режим ограничения. С целью снижения выбросов тока якоря в такие моменты времени применяют так называемое упреждающее токоограничение, обеспечиваемое за счет дополнительной обратной связи по току двигателя, подаваемой на вход тиристорного преобразователя.
Рассмотрим ограничение координат СУИМ с помощью задатчиков интенсивности.
Задатчики интенсивности (ЗИ) служат прежде всего для ограничения фазовых переменных СУИМ. В электромеханических СУИМ с помощью ЗИ ограничивают скорость, ускорение и рывок рабочего органа (первую, вторуюитретью производные положенияРО).
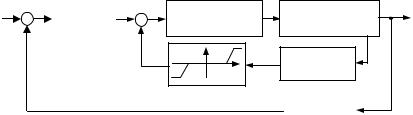
Задатчики интенсивности первого рода применяют для ограничения ускорения (замедления) электропривода и обеспечивают либо постоянство ускорения (замедления), либо постоянство времени регулирования при скачкообразном изменении сигнала задания скорости. Структурная схема ЗИ первого рода, обеспечивающего постоянство ускорения электропривода в переходных режимах, приведена на рис. 5.15.
Напряжение задания скорости Uзс можно изменять ступенчато. При этом выходной сигнал ЗИ будет меняться линейно в функции времени:
Uзи = U зс = (1/Tзи)Uрэt,
где Uрэ – напряжение релейного элемента (РЭ), Uрэ = = Uрэ maxsign(Uзс – U зс).
170