

652
.pdfA |
C C |
Рис. 4.3. Вынос в натуру длины линии способом редуцирования
4.6. Расчет точности при выносе проектных отметок
Расчетточности детальныхвысотныхпостроенийпроизводится на основе уравнений погрешностей размерных цепей каркаса промышленныхзданий.Вкачествезамыкающегозвенавысотной размерной цепи принимается допуск на отклонение отметки последней замыкающей конструкции от проектной или допустимая разность отметок двух смежных конструкций.
Примеры составления уравнений погрешностей приведены в табл. 4.1.
При получении в расчетах точности малых труднодостижимых допусков предусматривают дополнительные построения локальных сетей на монтажных горизонтах, при создании которых за основу принимают наиболее жесткий допуск на этом горизонте. При этом назначают один исходный репер, отметку которого определяют с двух реперов основного монтажного горизонта.
Наиболеежесткимдопускомнаосновноммонтажномгоризонте является допуск на отклонение опорных поверхностей колонны по высоте. Соблюдение этого допуска относительно ближайшего репера или относительно опорных поверхностей смежных колонн следует считать достаточным [5].
Плотность высотного обоснования должна обеспечивать вынос отметки при однократной постановке прибора. Проектная отметка передается на точку способом горизонта прибора или способом проектного превышения (рис. 4.4).
Средняя квадратическая погрешность вынесения проектной отметки в натуру при однократной постановке прибора вычисляется по формуле
m |
н |
|
m2 |
m2 |
m2 |
m2 |
m2 |
, |
(4.26) |
|
|
0 |
a |
b |
i |
|
|
|
где m0 — средняя квадратическая погрешность отметки исходного пункта высотного обоснования; ma — средняя квадратическая погрешность отсчета по рейке, установленной на исходном
51

пункте А; mb — средняя квадратическая погрешность установки рейки на проектный отсчет b в точке В; mi — средняя квадратическая погрешность превышения, обусловленная непараллельностью визирной оси трубы нивелира и оси его цилиндрического уровня; m — средняя квадратическая погрешность фиксации проектной отметки.
a |
|
A |
b |
|
ГП |
|
RP |
|
H |
|
B |
|
b |
|
H |
|
Рис. 4.4. Вынос проектной отметки в натуру |
Величины ma и mb равны:
m |
a(b) |
m2 |
m2 |
m2 |
m2 |
, |
(4.27) |
|
y |
отс |
ш |
в.у |
|
|
где my — средняя квадратическая погрешность отсчета вследствие неточной установки уровня в нульпункте; тотс — средняя квадратическая погрешность отсчета, обусловленная неточным определениемдоли делениярейки;тш —средняяквадратическая погрешность отсчета, обусловленная погрешностями нанесения делений рейки; тв.у — средняя квадратическая погрешность отсчета, обусловленная влиянием внешних условий.
Длявычислениясреднейквадратическойпогрешноститу,мм,
следует пользоваться формулами: |
|
для круглого уровня |
|
т = 5 S 10–4, |
(4.28) |
у |
|
52

для контактного уровня |
|
т = 1,5 S 10–4, |
(4.29) |
у |
|
для контактного уровня с лупой |
|
m 1,5 |
S |
10 4, |
(4.30) |
|
v |
||||
y |
|
|||
|
|
|
л
где — цена деления уровня, 2 мм; S — расстояние от нивелира до рейки, м; vл — увеличение лупы.
Величина тотс, мм, находится из выражения
mотс |
00,3t 0,2 |
S |
, |
(4.31) |
|
||||
|
|
v |
|
|
где t — цена наименьшего деления рейки, мм; v — увеличение зрительной трубы нивелира.
Точность нанесения сантиметровых делений на трехметровые шашечные рейки характеризуется средней квадратической погрешностью тш, мм, равной:
тш = ±0,3. (4.32)
Влияние внешних условий (теплового воздействия на нивелир, рефракции, вертикальных перемещений штатива и т. д.) может ослабиться правильной организацией работ.
Величина средней квадратической погрешности mi, мм, определяется по формуле
m |
|
S |
S |
|
i |
, |
(4.33) |
i |
|
||||||
|
з |
п |
|
|
|||
|
|
|
|
|
|
||
где Sз и Sп — расстояния от нивелира до задней и передней реек; i — угол между визирной осью трубы и осью цилиндрического уровня; — радианный угол в секундах (206265 ).
При нивелировании из середины mi = 0.
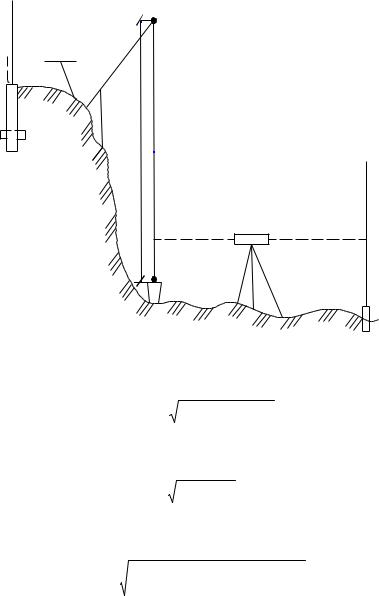
Отметки на сооружение или на дно котлована передают с помощью подвесных рулеток или проволок (рис. 4.5).
Средняя квадратическая погрешность передачи проектной отметки точки С в этом случае равна:
mt |
m02 m12 m22 ml2 mф2 , |
(4.34) |
где т0, т1 — средняя квадратическая погрешность передачи отметки от исходного пункта на рулетку (проволоку); т2 — средняя квадратическая погрешность передачи отметки с рулетки наточку С; ml — средняя квадратическая погрешность длины рулетки (проволоки) в интервале между точками С и D; mф — средняяквадратическаяпогрешностьфиксациипроектнойотметки.
53








 СC' (c) a
СC' (c) a 

Rp
l
D (d)
b
C
Рис. 4.5. Передача отметки на дно котлована с помощью проволок или рулеток
Величины m1 и m2 в формуле (4.34) находят по формуле
m |
m2 |
m2 |
m2 |
, |
(4.35) |
1(2) |
а |
рул |
i |
|
|
где ma — средняя квадратическая погрешность отсчета по рейке; mрул — средняя квадратическая погрешность отсчета по рулетке.
Средняя квадратическая погрешность трул равна:
mрул |
my2 mотс2 , |
(4.36) |
где величину ту находят по формулам (4.27)–(4.30), а тотс по формуле (4.31).
Средняя квадратическая погрешность ml равна:
ml |
c d |
mk2 m2t m2p mотв2 |
, |
(4.37) |
|
||||
|
l |
|
|
|
где l — длина рулетки (проволоки); с—d — длина участка рулетки (проволоки) между точками С и D (см. рис. 4.5); mk — средняя квадратическая погрешность компарирования рулетки (проволоки); m t — средняя квадратическая погрешность оп-
54

ределения поправки за температуру рулетки (проволоки), вычисляемая по формуле (4.24); m p — средняя квадратическая погрешность натяжения рулетки (проволоки); mотв — средняя квадратическая погрешность, обусловленная несовпадением рулетки (проволоки) с отвесной линией.
Средняя квадратическая погрешность m p вычисляется по формуле
m p |
|
l |
mp, |
(4.38) |
|
||||
|
|
E |
|
|
где l — длинарулетки (проволоки); Е — модуль упругости (для стали E = 3∙106 кг/м∙с2); — площадь поперечного сечения рулетки (проволоки); mp — средняя квадратическая погрешность определения силы натяжения проволоки.
Для вычисления средней квадратической погрешности mотв используется выражение
mотв |
|
K2 |
, |
(4.39) |
|
2l |
|||||
|
|
|
|
где K — горизонтальное расстояние между нижним концом рулетки и отвесной линией, проходящей через верхний конец рулетки (проволоки).
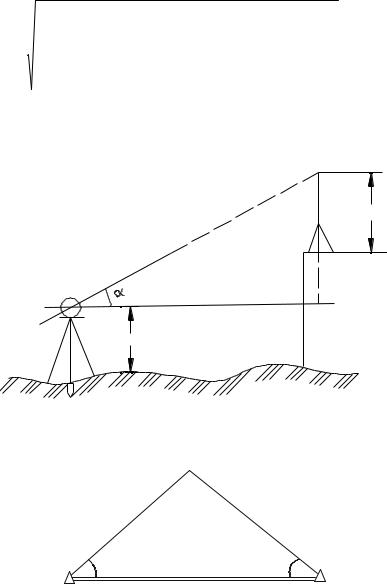
При передаче отметки односторонним тригонометрическим нивелированием (рис. 4.6) среднюю квадратическую погрешность передачи определяют по формуле
|
|
|
d2 |
|
|
m2 |
|
mh |
tg2 md2 |
|
|
|
|
|
mi2 mv2 mф2 , (4.40) |
cos4 |
|
p2 |
|||||
где — угол наклона; d — горизонтальное расстояние между исходнойточкойАиточкойС;p—весизмеряемогопревышения; md — средняя квадратическая погрешность определения расстояния d; т — средняя квадратическая погрешность измерения угла наклона ; mi — средняя квадратическая погрешность измерения высоты прибора; mv — средняя квадратическая погрешность определения высоты наведения; mф — средняя квадратическая погрешность фиксации определяемой точки.
Если измеряется наклонное расстояние S между исходной точкой А и точкой С, то формула (4.40) принимает вид:
mh |
sin2 ms2 S2 cos2 |
m2 |
mi2 mv2 mф2 . |
|
|
|
|
(4.41) |
|||
p |
2 |
||||
|
|
|
|
|
|
55
При передаче проектной отметки на точку С односторонним нивелированием с двух исходных пунктов (рис. 4.7) среднюю квадратическую погрешность тh следует вычислять по формуле
|
m |
2 |
|
|
|
2 |
|
||||||
|
|
|
c |
|
ctg 2 |
ctg 1 |
2 |
ctg2 1 2 |
|||||
|
|
c |
|||||||||||
mh |
|
|
|
|
|
|
|
|
|
, |
|||
|
|
m2 |
4 |
|
m2 |
|
|
|
|||||
|
|
|
|
|
|
|
(4.42) |
||||||
|
|
|
|
|
|
|
|
|
m2 |
m2 |
m2 |
||
|
p2 |
sin2 2 p2 |
|||||||||||
|
|
|
|
i |
v |
|
ф |
||||||
где с — длина базиса; 1 и 2 — горизонтальные углы между базисом и направлениями на точку С; mc/c — относительная погрешность измерения длины базиса; m — средняя квадратическая погрешность измерения горизонтальных углов 1 и 2.
v
S
C
d
i
A
Рис. 4.6. Передача отметки на сооружение односторонним тригонометрическим нивелированием
С
А |
1 |
с |
2 |
В |
Рис. 4.7. Передача проектной отметки односторонним нивелированием с двух исходных пунктов
56

|
Ниже представлена сводная таблица определения средних |
|||||||||||||||||
квадратических погрешостей выноса точки в натуру разными |
||||||||||||||||||
методами (см. табл. 4.1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Характеристики точности центрирования, характеристика |
|||||||||||||||||
визирных цепей, а также точность фиксирования проектной |
||||||||||||||||||
отметки см. соответственно в табл. 4.2, 4.3, 4.4. |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.1 |
||
Определение средних квадратических погрешостей выноса точки в |
||||||||||||||||||
|
|
|
натуру разными методами |
|
|
|
|
|||||||||||
|
Схема выноса |
Элеме- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нты раз- |
|
|
|
|
|
Расчетные формулы |
|
|
|||||||||
|
точки в натуру |
|
|
|
|
|
|
|
||||||||||
|
бивки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Способ полярных координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
B |
|
C |
m m2 |
S2 |
m2 |
|
m2 m2 |
, |
|
|
|||||||
|
|
C |
|
и |
2 |
|
|
|
|
S |
ф |
|
|
|
||||
|
|
|
и S |
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
S |
m |
|
(1,5 |
0,5k2 |
kcos )m2 0,5k2m2 |
, |
|
|||||||||
|
0 |
|
и |
S |
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
A |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
2. Способ прямой угловой засечки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
m m2 |
m2 |
m2 |
|
2m2 , |
|
|
|
|||||||
|
|
|
|
C |
|
и |
|
з |
|
|
ц.р |
|
|
ф |
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
S sin |
|
m |
|
2 |
m |
2 |
|
|
|||||
|
|
|
|
|
0 |
1 |
|
|
|
S0 |
|
|
|
|
|
|
||
|
С |
|
|
и |
|
sin |
|
S |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
S2 |
S1 |
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mS |
2 |
m |
|
2 |
|
|
|
|
||||||
|
|
|
1 и 2 |
mи |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
S1 |
0 |
|
|
|
|
. |
|
|
|
|
|||||
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
||
|
1 |
2 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A |
S |
|
B |
|
m S0 |
sin |
2 |
|
sin2 2 |
|
|
|
||||||
|
mз |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
0 |
|
|
|
|
|
sin4 |
|
|
|
|
|
|
|||||
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mз |
|
m S0 |
S12 S22 |
|
|
|
|
|
|
|||||
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
||
3. Способ линейной засечки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
C |
|
|
m m2 |
m2 |
|
|
|
|
|
|
|
S1S2 |
|
2m2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
C |
|
и |
|
S 2P(P S )(P S )(P S ) |
ф |
|||||||||
|
S |
S |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
0 |
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 и S2 |
m m2 |
2m2 |
|
1 |
|
2m2 |
, |
|
|
||||||
|
|
|
|
C |
|
и |
|
S sin2 |
|
|
ф |
|
|
|
||||
A |
S0 |
|
B |
P S1 S2 S0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
57 |

|
|
|
|
|
|
|
|
|
|
Окончание табл. 4.1 |
|
Схема выноса |
Элеме- |
|
|
|
|
|
|
|
|
||
нты раз- |
|
|
|
|
Расчетные формулы |
||||||
точки в натуру |
|
|
|
|
|||||||
бивки |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
4. Способ створной засечки |
|
|
|
|
|
|
|
|
|||
|
|
|
|
m m2 |
m2 |
m2 |
, |
|
|||
|
|
|
|
C |
ств |
|
|
S |
ф |
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
m m2 |
m2 |
m2 |
m2 |
m2 , |
|||
|
|
|
|
ств |
и |
|
|
ц |
р |
в |
фок |
S |
С |
|
|
m |
e |
|
S |
S 2 |
|
|
|
|
S |
2 |
|
|
0 |
, |
|
|
|||
|
|
|
ц |
|
|
S |
|
|
|
||
A |
S |
|
B |
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
S 2 |
|
|
|
|
|
|
|
|
m |
e |
|
, |
|
|
||
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
|
р |
2 |
|
S0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
20 2 |
|
S |
|
|
|
|
|
|
|
|
в |
|
|
v |
|
|
|
|
5. Способ створной засечки |
|
|
|
|
|
|
|
|
|||
A |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m m2 |
|
|
m2 |
2m2 |
|||
|
|
C |
|
C |
ствАD |
|
ствВС |
|
фок |
||
|
|
|
mствAD |
и mствBC должны вычисляться по формуле, |
|||||||
|
|
|
|
||||||||
|
|
|
|
приведенной выше |
|
|
|||||
С' |
|
D |
|
|
|
|
|
|
|
|
|
6. Способ прямоугольных координат |
|
|
|
|
|
|
|
||||
|
C |
|
S |
S |
S1, S2 и |
1 |
2 |
угол |
A |
|
|
E |
B |
|
|
|
|
|
|
|
|
|
m2 |
|
|
|
m2 |
m2 |
m2 |
|
|
S2 |
|
|||
|
|||||||||
mC и |
|
S1 |
|
S2 |
|
2 |
|
2 |
, |
mц2 |
mp2 |
mв2 |
mфок2 |
2mф2 |
|||||
mц, mр, mв следует вычислять по формулам, приведенным выше
7. Способ микротриангуляции
С |
1 и 2 |
m |
m2 |
m2 |
, |
|
|
|
|
|
|
и |
C |
и |
мт |
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
S m |
sin2 |
sin2 |
2 |
sin2 |
3 |
|
|
|
0 |
|
1 |
|
|
||||
|
|
|
мт |
sin2 |
|
3 |
|
|
|
|
1 |
2 |
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
B |
|
|
m |
S 2 |
S 2 |
S 2 |
|
|
|
|
|
mмт |
sin |
0 |
1 |
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|||
58
В приведенных выше формулах приняты обозначения:
S0 — расстояние между исходными пунктами планового геодезического обоснования;
Si — расстояние от исходного пункта до определяемой точки; i — горизонтальный угол на исходном пункте;
— горизонтальный угол на определяемой точке; e — погрешность центрирования прибора;
ei — погрешность редукций визирной цели; v — увеличение зрительной трубы прибора;
mс — средняя квадратическая погрешность положения определяемой точки;
mи — средняя квадратическая погрешность положения определяемой точки, обусловленная погрешностями исходных данных; mА, тВ — средние квадратические погрешности положения
пунктов А и В;
mS0 —средняяквадратическаяпогрешностьрасстояния между исходными пунктами;
m — средняя квадратическая погрешность исходного дирекционного угла;
m — средняя квадратическая погрешность отложения горизонтального угла;
m — средняя квадратическая погрешность измерения горизонтального угла;
ms —средняя квадратическаяпогрешность отложения расстояния;
mц — средняя квадратическая погрешность положения определяемой точки из-за погрешности центрирования прибора;
mр — средняя квадратическая погрешность положения определяемой точки из-за погрешностей редукции визирной цели; mств — средняя квадратическая погрешность построения ство-
ра между исходными пунктами;
mв —средняяквадратическая погрешностьпостроения створа из-за погрешностей визирования;
mфок —средняяквадратическаяпогрешностьпостроенияство- ра из-за перефокусировки зрительной трубы прибора;
mф —средняя квадратическая погрешность фиксации определяемой точки.
59
|
|
|
|
|
|
Таблица 4.2 |
|
|
|
Характеристики точности центрирования |
|||||
|
|
|
|
|
|
|
|
№ |
|
Тип центрира |
|
Погрешность цен- |
|||
п/п |
|
|
трирования, мм |
|
|||
|
|
|
|
|
|
||
1 |
Нитяный остроконечный отвес: |
|
10 |
|
|||
|
а) в обычных условиях |
|
|
||||
|
б) при тщательной установке прибора |
|
3–5 |
|
|||
|
в) при тщательной выверке станового винта и отвеса, с |
|
|
|
|||
|
установкой ветровых защит и в закрытом помещении |
|
2–3 |
|
|||
2 |
Механический (штанговый) |
|
5–10 |
|
|||
3 |
Оптический |
|
В среднем 1 |
|
|||
|
|
|
|
|
|
Таблица 4.3 |
|
|
|
Характеристика визирных целей а (а 5,6е1) |
|||||
|
|
|
|
|
|
|
|
№ п/п |
Тип визирной цели |
|
|
|
а, мм |
||
1 |
|
Деревянная веха |
|
|
5 |
|
|
2 |
|
Металлический прут |
|
|
2 |
|
|
3 |
|
Визирные марки |
|
|
Меньше 2 |
|
|
|
|
|
|
|
|
Таблица 4.4 |
|
|
|
Точность фиксирования проектной отметки |
|||||
|
|
|
|
|
|
|
|
№ п/п |
Тип знака |
|
|
тф, мм |
|||
1 |
|
Колья и гвозди |
|
|
2–3 |
|
|
2 |
|
Маяк |
|
1 |
|
||
5. ПОЭТАПНЫЙ ГЕОДЕЗИЧЕСКИЙ КОНТРОЛЬ НА СТАДИЯХ СТРОИТЕЛЬСТВА (НА ПРИМЕРЕ СТРОИТЕЛЬСТВА АВТОМОБИЛЬНОЙ ДОРОГИ)
5.1. Общие положения
Операционныйконтролькачествадорожно-строительныхработ обязателен для всех организаций, осуществляющих строительство и ремонт автомобильных дорог.
Целью операционного контроля строительно-монтажных работ является повышение качества дорожного строительства, предупреждение брака, своевременное обнаружение и исправлениедефектов,атакжеповышениеличной ответственностиисполнителей за выполнение ими работ.
Организация операционного контроля и надзор за его осуществлением возлагаются на главных инженеров строительных
60