

ЛР2 / MO_LR2
.docxЛабораторная работа №2
Климашин Денис, ИВТ-12М
Вариант 1
Задание 1.
Метод наискорейшего спуска.

Метод сопряженных градиентов

Метод Ньютона

Метод регулярного симплекса

Метод циклического покоординатного спуска

Метод Хука-Дживса


Задание 2.
Метод |
Коэффициент а |
Точность |
Кол-во вычислений |
Кол-во итераций |
Наискорейшего спуска |
1 |
0.001 |
61 |
1 |
0.00001 |
61 |
1 |
||
250 |
0.001 |
300 |
5 |
|
0.00001 |
421 |
7 |
||
1000 |
0.001 |
2560 |
43 |
|
0.00001 |
2927 |
49 |
||
Сопряженных градиентов |
1 |
0.001 |
63 |
1 |
0.00001 |
63 |
1 |
||
250 |
0.001 |
312 |
5 |
|
0.00001 |
438 |
7 |
||
1000 |
0.001 |
565 |
9 |
|
0.00001 |
692 |
11 |
||
Ньютона |
1 |
0.001 |
2 |
1 |
0.00001 |
2 |
1 |
||
250 |
0.001 |
2 |
1 |
|
0.00001 |
2 |
1 |
||
1000 |
0.001 |
2 |
1 |
|
0.00001 |
2 |
1 |
||
Правильного симплекса |
1 |
0.001 |
738 |
81 |
0.00001 |
1259 |
139 |
||
250 |
0.001 |
7968 |
959 |
|
0.00001 |
19877 |
2405 |
||
1000 |
0.001 |
17706 |
2145 |
|
0.00001 |
65381 |
7955 |
||
Циклического покоординатного спуска |
1 |
0.001 |
380 |
6 |
0.00001 |
380 |
6 |
||
250 |
0.001 |
380 |
6 |
|
0.00001 |
380 |
6 |
||
1000 |
0.001 |
390 |
6 |
|
0.00001 |
390 |
6 |
||
Хука-Дживса |
1 |
0.001 |
17 |
3 |
0.00001 |
25 |
5 |
||
250 |
0.001 |
17 |
3 |
|
0.00001 |
25 |
5 |
||
1000 |
0.001 |
17 |
3 |
|
0.00001 |
25 |
5 |
Выводы: градиентные методы примерно одинаково показали себя при минимизации функции данного вида, но при сильно овражной функции (коэффициент а=1000) метод сопряженных градиентов показал себя более эффективным, так как он избегает зигзагообразного характера приближения к точке минимума (выбор направления шага учитывает не только антиградиент, но и направление на предыдущем шаге). Метод Ньютона показал себя наиболее эффективным и сходился к точке минимума за одну итерацию, но это лишь из-за того, что это семейство функций является квадратичным (при минимизации функции от большего количества переменных вся вычислительная мощность лежала бы на вычислении обратного Гессиана). Метод регулярного симплекса очень неэффективен для минимизации сильно овражных функций, так как быстро опускается на «дно», а затем начинает медленно сходиться к минимуму. Остальные прямые методы минимизации показали себя стабильными для данного семейства функций.
Задание 3-4.
f(x) = 64x12+126x1x2+64x22-10x1+30x2+13

Метод |
Точность |
Итерации п.3 |
Вычисл. п.3 |
Итерации п.2 |
Вычисл. п.2 |
Наискорейшего спуска |
0.001 |
372 |
20229 |
5 |
300 |
0.00001 |
435 |
22889 |
7 |
421 |
|
Сопряженных градиентов |
0.001 |
3 |
172 |
5 |
312 |
0.00001 |
14 |
558 |
7 |
438 |
|
Ньютона |
0.001 |
1 |
2 |
1 |
2 |
0.00001 |
1 |
2 |
1 |
2 |
|
Правильного симплекса |
0.001 |
99 |
882 |
959 |
7968 |
0.00001 |
157 |
1403 |
2405 |
19877 |
|
Циклического покоординатного спуска |
0.001 |
326 |
19164 |
6 |
380 |
0.00001 |
472 |
27683 |
6 |
ё380 |
|
Хука-Дживса |
0.001 |
3 |
198 |
3 |
17 |
0.00001 |
5 |
321 |
5 |
25 |
Выводы:
1. Среди градиентных методов метод сопряженных градиентов показал на примере функции из п.3, что, избегая зигзагообразной траектории приближения к минимуму исследуемой функции, достичь минимума можно намного быстрее.
2. Метод Ньютона всё так же сходится к минимуму за одну итерацию, так как исследуемая функция квадратичная, вся вычислительная мощность заключается в вычислении обратного Гессиана, что сказалось бы на времени минимизации функции большего кол-ва переменных.
3. Для функции из п.3 метод регулярного симплекса срабатывает более быстро, так как в этом случае исследуемая функция не на столько овражна, как функция в п.2.
4. Циклический покоординатный спуск для функции из п.3 сходится медленнее к решению, так как данная функция не сепарабельна в отличии от функции из п.2.
5. Метод Хука-Дживса для функции из п.3 сходится за то же кол-во итераций, но с большим числом вычислений. Скорее всего это число вычислений лежит в основе предварительного этапа исследующего поиска.
Задание 5.
Табличка для методов, у которых есть одномерный поиск.
Метод |
Точность алгоритма |
Точность одномерного поиска |
Кол-во вычислений |
Кол-во итераций |
Наискорейшего спуска |
10-3 |
10-6 |
36535 |
709 |
10-8 |
285653 |
4187 |
||
10-5 |
10-6 |
36535 |
709 |
|
10-8 |
515092 |
7745 |
||
Сопряженных градиентов |
10-3 |
10-6 |
912 |
17 |
10-8 |
1075 |
15 |
||
10-5 |
10-6 |
1835 |
35 |
|
10-8 |
1075 |
15 |
||
Циклического покоординатного спуска |
10-3 |
10-6 |
6141 |
130 |
10-8 |
8728 |
130 |
||
10-5 |
10-6 |
65291 |
1364 |
|
10-8 |
92976 |
1368 |
Выводы:
1. Метод циклического покоординатного спуска не позволяет при заданной точности получить точку минимума вследствие преждевременного окончания процесса поиска. Так для точности 10-3 минимизация дала неправильный результат: точку (0.62, 0.38). А для точности 10-5 минимизация дала близкий к истине результат: точку (0.95, 0.91).
2. Метод сопряженных градиентов сходится быстрее к точке минимума при большей точности одномерной минимизации. Так при решении задачи одномерной минимизации с точностью 10-8 метод сошёлся за меньшее число итераций чем при решении той же задачи одномерной минимизации с точностью 10-6.
3. Скорость метода наискорейшего спуска показалась очень чувствительной к точности решения задачи одномерной минимизации.
Табличка для методов, у которых нет одномерного поиска.
Метод |
Точность |
Кол-во вычислений |
Кол-во итераций |
Ньютона |
10-3 |
2 |
1 |
10-5 |
2 |
1 |
|
Регулярного симплекса |
10-3 |
2712 |
336 |
10-5 |
111083 |
16374 |
|
Хука-Дживса |
10-3 |
120 |
3 |
10-5 |
326 |
5 |
Задание 6.

Метод |
Начальное приближение |
Кол-во вычислений |
Кол-во итераций |
Точка минимума |
Наискорейшего спуска |
(0; 0) |
748 |
13 |
(3;2) |
(-5; 0) |
516 |
9 |
(3.6; -1.85) |
|
Сопряженных градиентов |
(0; 0) |
641 |
11 |
(3;2) |
(-5; 0) |
298 |
5 |
(3.6; -1.85) |
Вычисления производились с точностью 10-3, для решения одномерной минимизации была взята точность 10-7.
Выводы:
При начальном приближении (0; 0) градиентные методы начинают спускаться в сторону возрастания аргумента x2, так как функция убывает в ту сторону, поэтому методы сходятся к точке минимума (3;2). А при начальном приближении (-5;0) функция убывает в сторону убывания аргумента x2, поэтому градиентные методы там сходятся к точке минимума (3.6; -1.85). То есть при минимизации многомодальных функций градиентные методы будут сходится к той точке минимума, к которой ближе спустились на первой итерации.
Начальное
приближение (0;0)->сходимся к точке(3;2)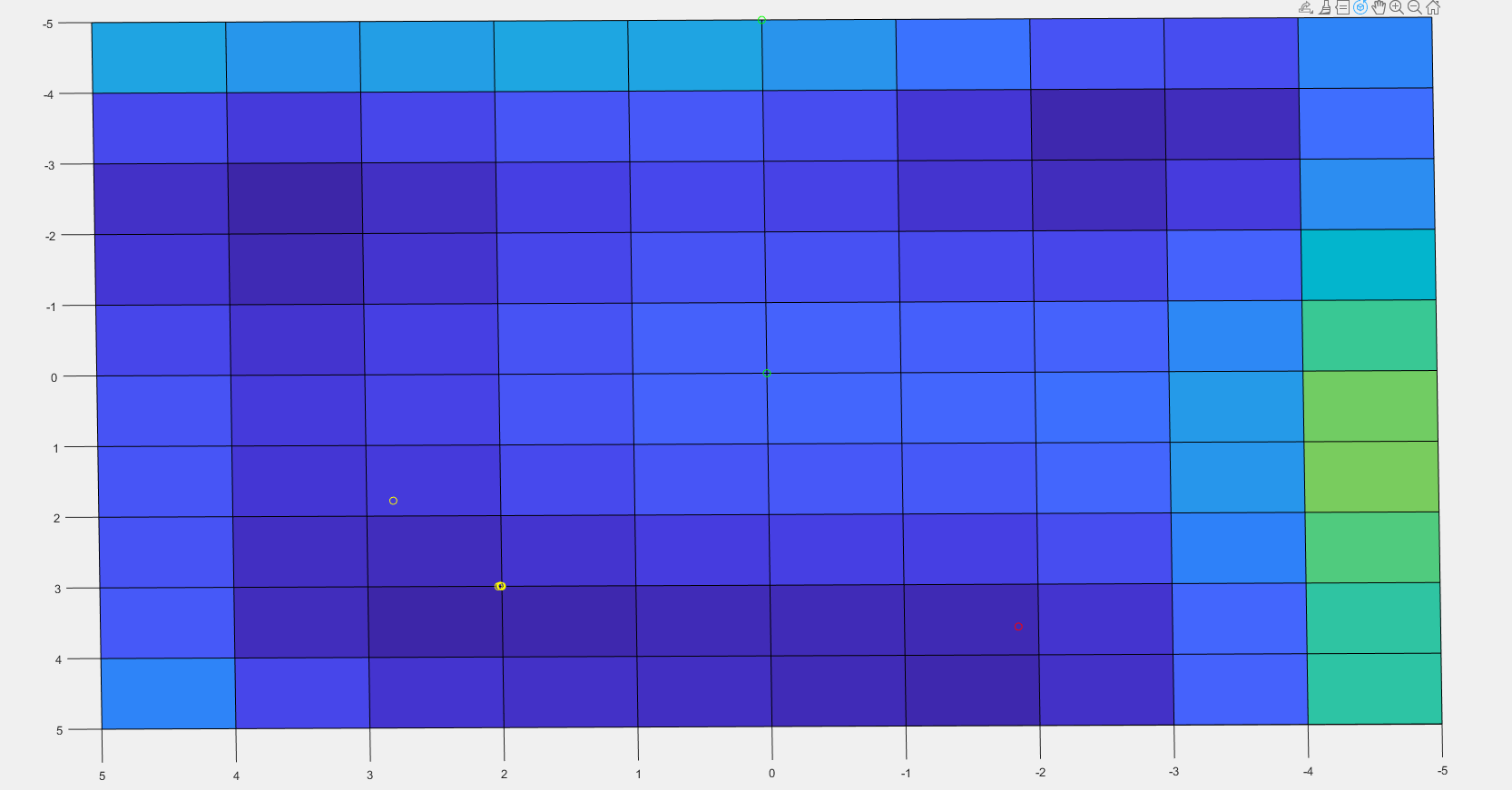
Начальное приближение (-5; 0)->сходимся к точке(3.6; -1.85)
