

10.АДАПТИВНЫЕ САУ
10.1.Особенности адаптивного управления
Термин «адаптация» заимствован теорией управления из биологии, где им обозначают свойство приспособления организма к изменениям внешней среды. Поскольку элементы приспособления или адаптации существуют в любой автоматической системе, как в замкнутой, так и разомкнутой, то для выделения класса адаптивных систем необходимо дать характеристику тем условиям или требованиям, которые предъявляются к автоматическим системам управления и не могут быть качественно разрешены традиционными методами неадаптивного управления.
Прежде всего необходимость в адаптивных системах управления возникает в связи с значительным усложнением решаемых задач управления. Причем специфическая особенность такого усложнения заключается в отсутствии практической возможности для подробного изучения и описания процессов, протекающих в управляемом объекте. Примерами таких объектов могут служить многокомпонентные технологические процессы в химической промышленности, где не представляется возможным описание всей совокупности химических реакций, термодинамических и других физических процессов, или современные высокоскоростные летательные аппараты, точные априорные данные о характеристиках которых во всех условиях функционирования не могут быть получены из-за значительных разбросов параметров атмосферы, больших диапазонов изменения скоростей полета, дальностей и высот, а также из-за наличия широкого спектра параметрических и внешних возмущений.
Неадаптивные методы управления, как правило, предусматривают наличие достаточного объема априорных сведений о внутренних и внешних условиях работы объекта еще на предварительной стадии разработки системы, которые затем используются при проектировании автоматической системы. Чем полнее априорная информация о характеристиках системы и условиях ее работы, тем обычно выше качество неадаптивного управления. Отсюда видно, что создание адаптивных систем управления осуществляется в принципиально иных условиях, т. е.
249
адаптивные методы должны способствовать достижению высокого качества управления при отсутствии достаточной полноты априорной информации о характеристиках управляемого процесса или в условиях неопределенности.
Вполне очевидно, что по мере усложнения задач, возлагаемых на автоматические системы управления, указанная неопределенность растет, т. е. становится все сложнее заранее определять характер изменения динамических свойств системы и управляемого процесса. Поэтому трудности в обеспечении надлежащего качества управления также возрастают по мере уменьшения объема априорных знаний о системе.
Благодаря адаптивным методам управления найдены достаточно эффективные способы преодоления указанных трудностей.
Эффект приспособления к изменяющимся условиям в адаптивных системах достигается за счет того, что часть функций по получению, обработке и анализу недостающей информации об управляемом процессе осуществляется уже не проектировщиком на предварительной стадии, а самой системой в процессе ее нормальной эксплуатации.
Такой частичный перенос функций способствует не только более полному использованию рабочей информации (совокупности данных о состоянии системы, получаемой непосредственно в процессе управления) при формировании управляющих воздействий, но и позволяет существенно снизить влияние неопределенности на качество управления, компенсируя в определенной степени недостаток априорного знания проектировщика об управляемом процессе.
Таким образом, к адаптивному управлению приходится обращаться тогда, когда сложность управляемого процесса достигает такого уровня, при котором влияние неопределенности или «неполноты» априорной информации об условиях работы системы становится существенным для обеспечения заданного качества процессов управления.
Адаптивными системами называются системы, в которых способ функционирования (алгоритм) управляющего устройства автоматически изменяется целенаправленным образом для осуществления успешного или в каком-либо смысле наилучшего (оптимального) управления объектом, при этом характеристики
250
объекта или воздействия внешней среды могут изменятся заранее непредвиденным образом (Фельдбаум А. А.).
Процесс пополнения информации (о системе управления, о внешних воздействиях), необходимой для управления в заданном смысле, называют адаптацией.
10.2. Принципы построения и классификация адаптивных систем
Адаптивные, или приспосабливающиеся, системы – это системы, которые автоматически приспосабливаются к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления.
Качество управления численно определяется критерием качества J , который оценивает заранее выбранный наиболее важный показатель работы САУ. Им может быть какой-либо показатель точности работы системы или качества переходного процесса, производительность, экономичность и т. д. В общем случае критерий качества J представляет собой функционал, зависящий от выходных и входных величин системы, подобно критерию оптимальности в оптимальных САУ. В отдельных случаях J может быть просто функцией.
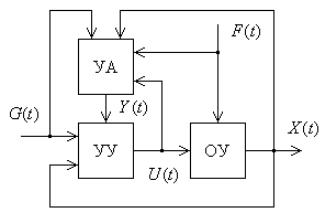
На рис. 10.1 показана в общем виде схема адаптивной САУ. Здесь ОУ – объект управления, УУ – управляющее устройство, УА – устройство адаптации.
Рис. 10.1. Схема адаптивной САУ
Контур, образованный УУ и ОУ, является основным контуром
251
системы и представляет собой обычную неадаптивную САУ. Устройство адаптации УА управляет основным управляющим устройством УУ, изменяя его оператор, т. е. схему и значения параметров, в соответствии с изменением внешних условий работы и свойств объекта. Для этого УА измеряет в самом общем случае внешние воздействия G(t) и F (t) , выходную и входную величины
объекта
критерия
X (t) |
и |
U |
качества
(t) . По этим |
|
управления |
J |
данным определяется значение (X ,U ,G, F ). В зависимости от
алгоритма работы устройство УА определяет отклонение критерия
качества |
J |
от заданного или от экстремального его значения и |
воздействует на УУ так, чтобы ликвидировать это отклонение.
Причиной изменения критерия |
качества |
J |
может быть изменение |
|
внешних условий работы |
в виде изменении каких-либо |
|||
характеристик воздействий G(t) и |
F (t) |
|
или изменение свойств |
|
основного контура, т. е. операторов объекта управления ОУ и основного управляющего устройства УУ.
Таким образом, адаптивная САУ содержит два контура управления – основной контур и второй контур – адаптации, создаваемый управляющим устройством адаптации УА. Для этого второго контура объектом управления является вся основная САУ.
Контур адаптации образует второй уровень управления, второй этаж основной САУ. Возможен и следующий уровень адаптации, когда управляющее устройство адаптации УА, в свою очередь, подстраивается, изменяется следующим управляющим устройством, которое при изменении внешних условий или свойств первичной адаптивной САУ изменяет алгоритм адаптации, осуществляемой УА. Аналогично возможны многоступенчатые САУ, содержащие большее число уровней адаптации. У таких САУ каждый последующий уровень управляет предыдущим, расширяя диапазон условий, при которых система будет правильно выполнять свою задачу, или повышая качество ее выполнения в заданном диапазоне.
Схема классификации систем автоматического управления представлена на рис. 10.2.
САУ может быть отнесена либо к классу приспосабливающихся, либо к классу обычных неприспосабливающихся систем. Такое деление основано на способности или неспособности той или иной системы осуществлять контролируемые изменения, т. е. изменения свойств системы управления, которые она сама производит во время
252

своего функционирования.
Если система автоматического управления обладает способностью производить контролируемые изменения, то ее следует отнести к классу приспосабливающихся систем.
Рис. 10.2. Схема классификации систем автоматического управления
Неприспосабливающиеся системы не способны производить контролируемые изменения. В этих системах вся имеющаяся априорная информация используется для выбора и реализации таких свойств систем управления, которые являются оптимальными для некоторых типовых или наиболее вероятных внешних и внутренних условий работы. Во время эксплуатации выбранные заранее свойства управляющей системы могут изменяться лишь неконтролируемым образом.
В зависимости от характера контролируемых изменений
253
приспосабливающиеся системы можно подразделять на самонастраивающиеся (СНС), самоорганизующиеся (СОС) и самообучающиеся – самоалгоритмизирующиеся (САС).
Самонастраивающиеся обычно называют такие приспосабливающиеся системы, в которых контролируемыми изменениями свойств системы управления являются изменения ее параметров или управляющих воздействий.
Самоорганизующиеся – это приспосабливающиеся системы, в которых контролируемыми изменениями являются изменения структуры системы управления (возможно и ее параметров, а также управляющих воздействий).
В самоалгоритмизирующихся системах контролируемыми изменениями являются изменения самого алгоритма управления (возможно и структуры, параметров и воздействий системы управления).
Таким образом, из трех перечисленных классов приспосабливающихся систем наиболее совершенным является класс самоалгоритмизирующихся систем. Самоорганизующиеся системы представляют собой частный случай самоалгоритмизирующихся систем. Частным случаем самоорганизующихся систем являются самонастраивающиеся системы.
Адаптивные системы, в которых осуществляется изменение параметров управляющего устройства с целью обеспечения оптимальной работы системы, называют самонастраивающимися. СНС строятся на принципе добавления к основной автоматической системе контура самонастройки, выполняющего следующие функции:
1)получение информации о воздействиях и динамических свойствах системы в процессе работы (получение рабочей информации);
2)формирование из полученной информации некоторой величины – значения показателя качества (текущего критерия самонастройки);
3)сравнение текущего показателя качества с желаемым и вычисление на этой основе соответствующего управляющего воздействия или сигнала изменения параметров управляющего устройства для достижения желаемого показателя качества.
Принцип работы СНС заключается в следующем. Системе
254
задается некоторая мера качества J . В общем случае ею может быть функционал или функция, зависящие от координат и параметров системы X , U , G , F , Y , t. В процессе работы системы значение меры качества меняется в зависимости от изменения входных управляющего G и возмущающего F воздействий и от изменения динамических свойств объекта. Задача самонастройки в этих условиях сводится к обеспечению минимума J = J min по вектору
управления U или вектору перестраиваемых случаев требуется обеспечить J Jзад .
параметров
Y
. В ряде
Физически требование
J = J min
или
J Jзад
может означать
работу некоторого двигателя с максимальным коэффициентом полезного действия, минимальное время переходных процессов в системе, независимость динамики системы от изменения коэффициентов объекта, минимум средней квадратической ошибки при помехах и т. д.
Взависимости от способа, с помощью которого система стремится обеспечить цель управления СНС можно подразделить на поисковые и беспоисковые (аналитические).
Впоисковых СНС контролируемые изменения свойств управляемой системы осуществляются в результате поиска условий
экстремума. Вектору управления U |
или |
вектору параметров |
Y |
||
|
|
|
|
|
|
задается пробное отклонение, оценивается |
приращение |
J |
и в |
||
зависимости от этого приращения осуществляется движение по
векторам U |
или Y в сторону получения J min . Самонастраивающиеся |
системы, в |
которых для отыскания J min применяется указанный |
процесс поиска, получили название поисковых СНС.
Наряду с поисковыми существует класс беспоисковых СНС,
процесс движения системы к |
J = J |
min |
или обеспечение |
J |
|
где
Jзад
осуществляется без применения процесса поиска – в результате аналитического определения условий экстремума. Под аналитическим определением условий экстремума подразумеваются вычисления, производимые в соответствие с алгоритмом, представляющим собой аналитическое решение экстремальной задачи.
На основании априорной и текущей информации о входных воздействиях и состоянии системы вычисляется некоторое требуемое значение меры качества J = Jзад . Значение J зад сравнивается с
255
текущим значением меры мера рассогласования J =
качества
Jзад − J .
J
и подсчитывается некоторая
Далее по информации о |
J вектор управления U или вектор |
|||||
параметров |
Y |
изменяется |
таким |
образом, чтобы |
свести |
|
рассогласование |
J к нулю или к минимально возможной величине. |
|||||
При такой постановке приходится решать два вопроса. |
|
|||||
1. Выбрать |
J зад |
таким |
образом, |
чтобы выполнить |
условие |
|
Jзад
Jmin
;
с другой стороны необходимо, чтобы
J зад
было
достаточно близко к
J min
для обеспечения достаточно высокого
качества работы системы. При этом структура системы должна
принципиально позволять получение |
равенства |
J = Jзад |
|
при |
|||
имеющихся ограничениях в системе. |
|
|
|
|
|
||
2. Отыскать алгоритмы перестройки вектора управления U |
или |
||||||
вектора параметров |
Y |
, обеспечивающих |
сходимость |
J |
к |
J зад с |
|
|
|
|
|
|
|
|
|
требуемыми динамическими показателями.
При сравнении аналитических и поисковых СНС необходимо иметь в виду, что аналитические системы нуждаются в информации и времени для вычисления оптимального решения, но не требуют времени на поиск; поисковые, наоборот, требуют времени на поиск, но не нуждаются в полной информации.
Вследствие указанных свойств поисковые системы находят преимущественное применение для реализации оптимальных условий работы системы в статике. Аналитические системы применяются главным образом в тех случаях, когда изменяются динамические свойства управляемого объекта и внешние условия.
Взависимости от способа, которым осуществляются контролируемые изменения, приспосабливающиеся системы вообще,
аследовательно, самонастраивающиеся системы в частности можно разделить на пассивные и активные.
Впассивных самонастраивающихся системах так же, как и в неприспосабливающихся, решение задачи оптимизации может выполняться лишь на стадии проектирования и наладки.
Активными самонастраивающимися системами являются системы, осуществляющие контролируемые изменения в зависимости от текущей, а не только от априорной информации об условиях работы системы управления.
Самонастраивающиеся системы можно также подразделить на
256
системы с разомкнутым и замкнутым циклами самонастройки. Разомкнутыми самонастраивающимися системами называют
также системы, в которых отсутствуют самоанализ успешности осуществляемых ими контролируемых изменений.
Самонастраивающиеся системы с замкнутым циклом или просто замкнутые самонастраивающиеся системы, наоборот, обладают способностью осуществлять самоанализ успешности осуществляемых ими контролируемых изменений.
Взависимости от способа, с помощью которого система стремится обеспечить цель управления, самонастраивающиеся системы можно подразделить на аналитические (или вычислительные) и поисковые.
Ваналитических самонастраивающихся системах контролируемые изменения свойств системы управления (настройка параметров или изменения управляющих воздействий) выполняются
врезультате аналитического определения условий экстремума, определяющих цель и качество управления.
Впоисковых самонастраивающихся системах контролируемые изменения свойств управляющей системы осуществляется в результате поиска условий экстремума.
Большой интерес представляется создание комбинированных систем, использующих как аналитический, так и поисковый принцип самонастройки.
Основное назначение беспоисковых СНС в управлении ЛА – обеспечить удовлетворительную работу системы в условиях широкого диапазона изменения динамических характеристик объекта. С этой задачей в определенной степени могу справляться и неадаптивные системы. В настоящее время известны три класса неадаптивных систем, которые позволяют обеспечить в некоторых пределах независимость динамики системы от изменяющихся характеристик объекта управления:
–системы с бесконечным (практически достаточно большим) коэффициентом усиления;
–системы с автоколебательным режимом;
–системы с переменной структурой (СПС);
Все три класса во многих случаях дают хорошие результаты в системах управления ЛА.
В системах с бесконечным коэффициентом усиления задача
257
сводится к синтезу структуры основного контура, обеспечивающего возможность установления бесконечного или практически достаточно большого коэффициента усиления, при котором динамика системы не зависит от свойств нестационарного объекта или зависит в малой степени.
Системы с автоколебательным режимом характеризуются тем, что в основной контур вводится специальная нелинейность, за счет которой в системе возникают автоколебания. Параметры автоколебаний зависят от параметров объекта и меняются вместе с ними. С изменением параметров автоколебаний меняется эквивалентный комплексный коэффициент усиления нелинейности, причем синтез системы осуществляется таким образом, чтобы это изменение в определенной степени компенсировало влияние переменных коэффициентов объекта на динамику всей замкнутой системы.
В системах с переменной структурой (СПС) независимость динамики от свойств нестационарного объекта обеспечивается с помощью организации специального вида движения – скользящего режима. Скользящий режим характеризуется переключением в системе одной структуры регулятора на другую структуру теоретически с бесконечной, практически с достаточно большой частотой. Движение системы в этом случае подчиняется только дифференциальному уравнению гиперповерхности переключения, задаваемому заранее, и не зависит от других параметров системы, в том числе и от переменных параметров объекта управления.
Такие неадаптивные системы с ограниченными свойствами адаптации называются системами эквивалентными адаптивным.
Применение принципов адаптации по сравнению с неадаптивным управлением позволяет:
1)осуществить оптимизацию режимов работы объекта;
2)обеспечить работоспособность системы в условиях широкого изменения динамических свойств объекта;
3)повысить надежность системы, унифицировать отдельные регуляторы или блоки регуляторов и приспособить их для работы с различными видами однотипных объектов;
4)снизить технологические требования к изготовлению отдельных узлов и элементов системы;
5)сократить сроки разработки и доводки системы.
258