Экзаменационные.Вопросы.ОТУ
.docxВОПРОСЫ К ЭКЗАМЕНУ
по дисциплине «Основы теории управления»
Принципы автоматического управления.
В теории автоматического управление различают три принципа управления: управление по задающему воздействию, управление по отклонению, управление по возмущающему воздействию.
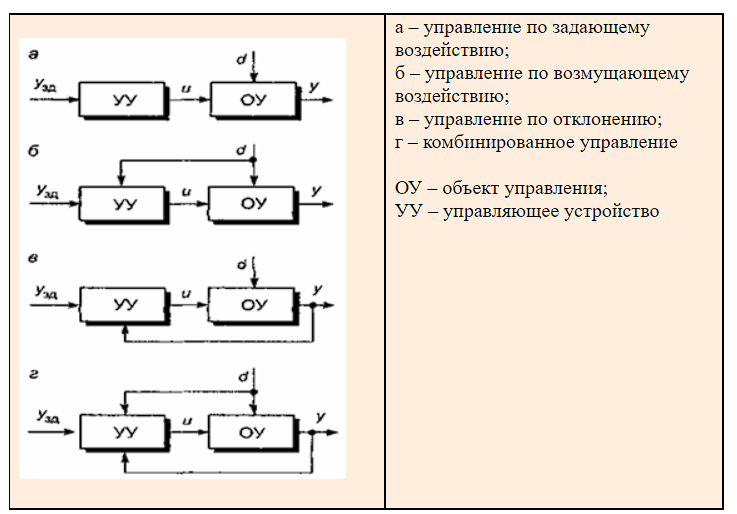
Для принципа управления по задающему воздействию характерна разомкнутая цепь воздействий, то есть уу оказывает воздействие на оу, но обратное воздействие не происходит. Схема проста в реализации, но может быть хорошо исполнена только тогда, когда оу хорошо изучен и возмущающее воздействие остается постоянным.
Одна из задач управляющего устройства при этом заключается в формировании такого управляющего воздействия, которое компенсировало бы влияние на объект управления измеренного возмущающего воздействия.
Управление по отклонению осуществляется на основе информации о состоянии объекта управления. Взаимодействие между ОУ и УУ осуществляется как по цепи прямой связи – от УУ к ОУ, так и по цепи обратной связи – от ОУ к УУ Информация при этом передается по замкнутому контуру (контуру регулирования), поэтому управление по отклонению называют замкнутым или управлением с обратной связью. Наличие обратной связи приводит к созданию своеобразной системы управления, по сути своей представляющей фильтр, который должен точно передавать управляющее воздействие (подчиняться в основном управляющему воздействию) и подавлять возмущающие воздействия.
Для комбинированных систем управления характерно использование информации о возмущающем воздействии, задающем воздействии и управляемом параметре.
Комбинированные системы управления имеют более высокое качество управления, чем системы, работающие по отклонению, поскольку информация о значении возмущающего воздействия позволяет устройству управления работать с некоторым предвидением, т.е. компенсировать основное внешнее возмущающее воздействие, вызывающее нарушение номинального режима, раньше, чем появится достаточно большое отклонение текущего значения параметра (температуры) от заданного. Комбинированная система управления обладает точностью и быстродействием.
Классификации АС.
Есть три основный классификации САУ: по принципу автоматического управления, по типу управления и характеру сигналов управления.
В принцип автоматического смотри выше.
По типу управления:
Системы стабилизации (поддерживает на заднном уровне выходную величину ОУ в условиях изменения возмущающего сигнала),
Системы программного управления (задача систем программного управления (СПУ) состоит в достижении высокой точности воспроизведения управляющих воздействий, которые из-меняются по заданному закону)
Следящие системы(основной является задача наиболее точного воспроизведения управляющих воздействий.)
системы оптимального управления. Системы оптимального управления реализуют управление по экстре-муму обобщенного показателя качества работы ОУ, такого как производительность, быстродействие, экономичность.
Системы экстремального управления. Системы экстремального управления применяются в тех случаях, когда показатель качества (некоторая функция координат системы) имеет экстремум, задача системы экстремального управления – отыскать и поддержи-вать режим работы объекта управления, при котором обеспечивается экс-тремум показателя качества.
Системы адаптивного управления должны обеспечивать высокое каче-ство управления в условиях изменения внешних воздействий или внутренних характеристик объекта управления.
Характеры сигналов управления: непрерывные, релейные, дискретные.
Непрерывной системой автоматического управления называется такая система, в которых характеристики ОУ являются непрерывными функциями своих координат, а все сигналы управления и внешние сигналы, действую-щие на систему, описываются непрерывными функциями времени.
Дискретной системой называется такая САУ, в которой имеет место прерывистый характер передачи информации управления. Такой характер сигналов управления может быть обусловлен включением в систему им-пульсных или цифровых устройств. В связи с этими все дискретные систе-мы разделяются на две большие группы:
- импульсные САУ;
- цифровые САУ.
Статические характеристики.
Статической характеристикой САУ называют зависимость между ее выходной величиной и входным воздействием, в установившемся режиме.
Характер этой зависимости определяется статическими характеристиками звеньев, входящих в САУ и способами их соединений между собой. В качестве входных воздействий обычно рассматриваются задающее или основное возмущающее воздействие. В общем случае такие характеристики нелинейны.
При построении САУ важно получить необходимый вид статических характеристик в заданном диапазоне изменением регулируемой величины. На практике пользуются двумя видами статических характеристик звена или САУ:
Зависимость между выходной регулируемой величиной и заданным воздействием при постоянной нагрузке, т.е.
xВЫХ = f(x0) при xB = const, (4.1)
где xВЫХ – выходная регулируемая величина;
x0 –заданное воздействие;
xB – возможное воздействие (нагрузка).
Зависимость между выходной регулируемой величиной и нагрузкой при постоянном заданном воздействии, т.е.
xВЫХ = f(xB) при x0 = const. (4.2)
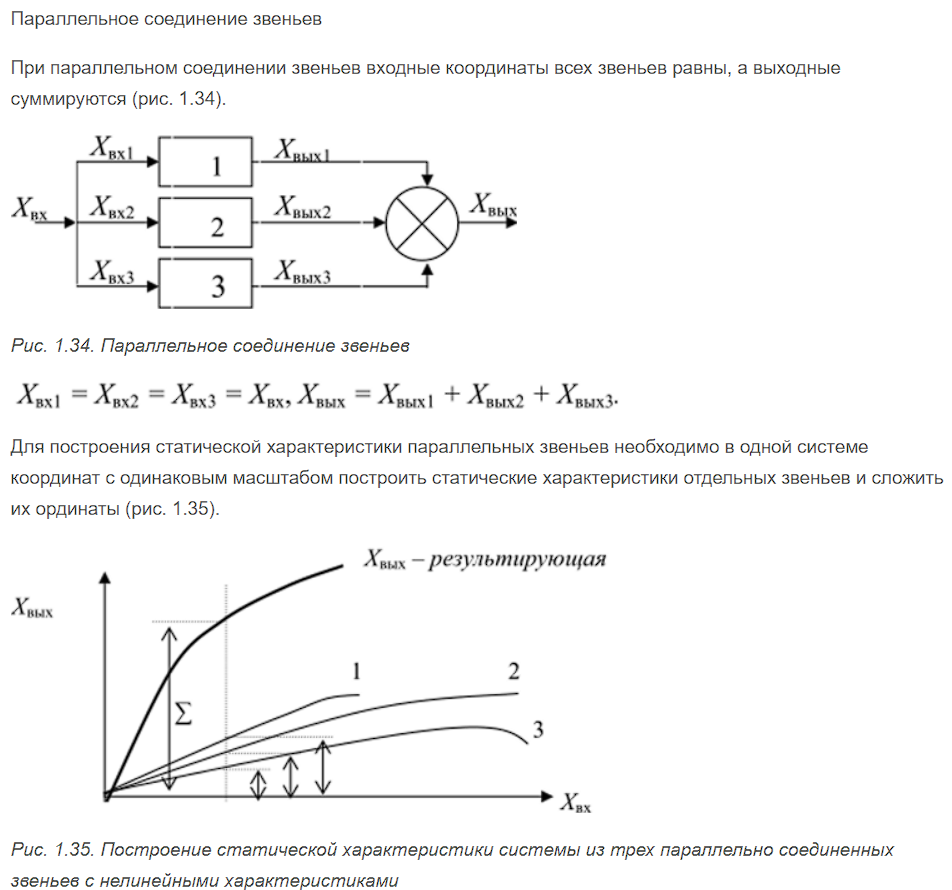
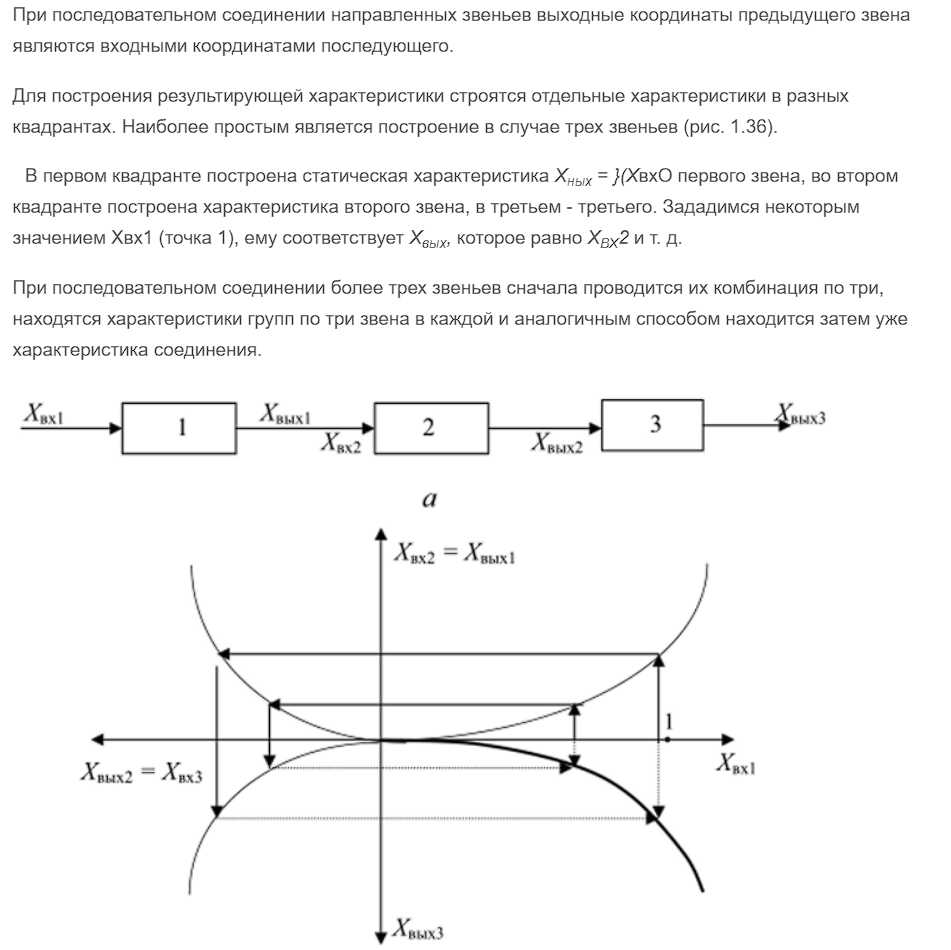
Статические характеристики соединений звеньев.
https://studme.org/309167/tehnika/staticheskie_harakteristiki_soedineniy_zvenev
Статические ошибки по управлению и по возмущению.
Херня ебаная
https://studfile.net/preview/5226227/page:15/#33
Астатические элементы и астатические системы.
https://studme.org/246776/tehnika/astaticheskie_sistemy
Динамика систем.
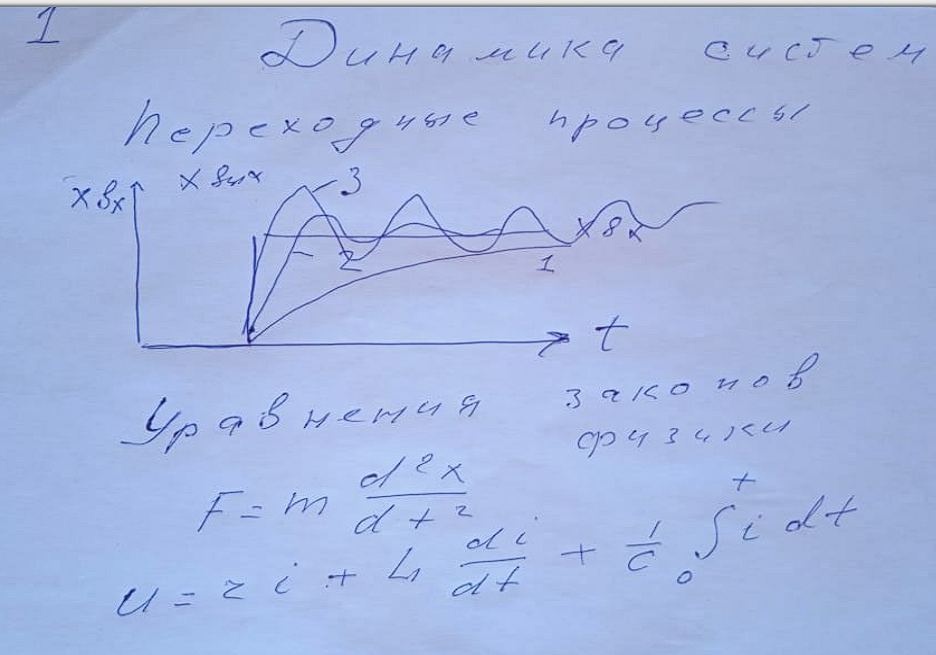
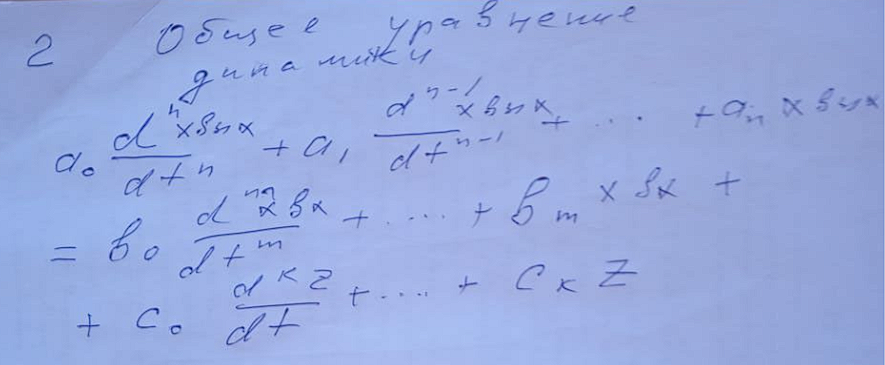
Методы описания динамических систем.
Методы решения дифференциальных уравнений.
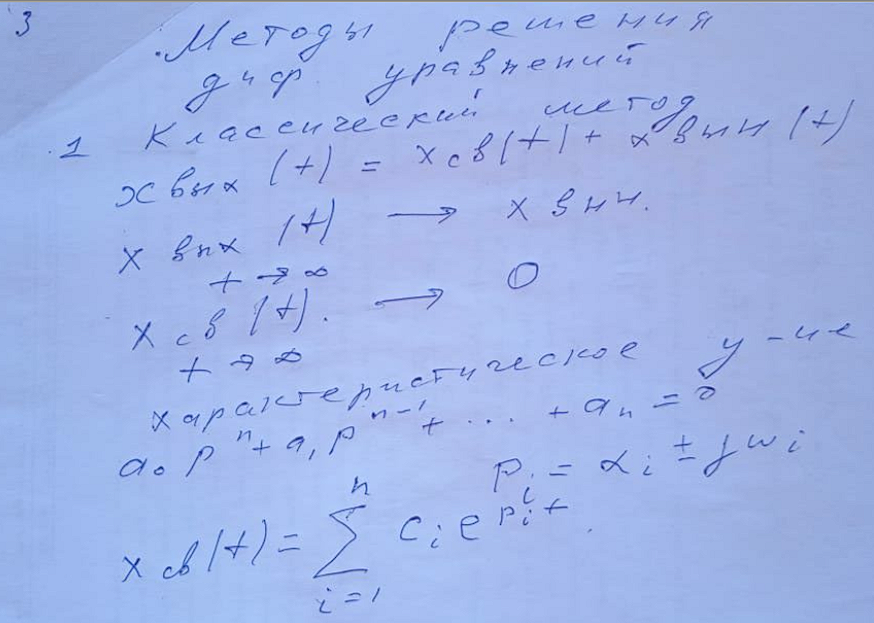
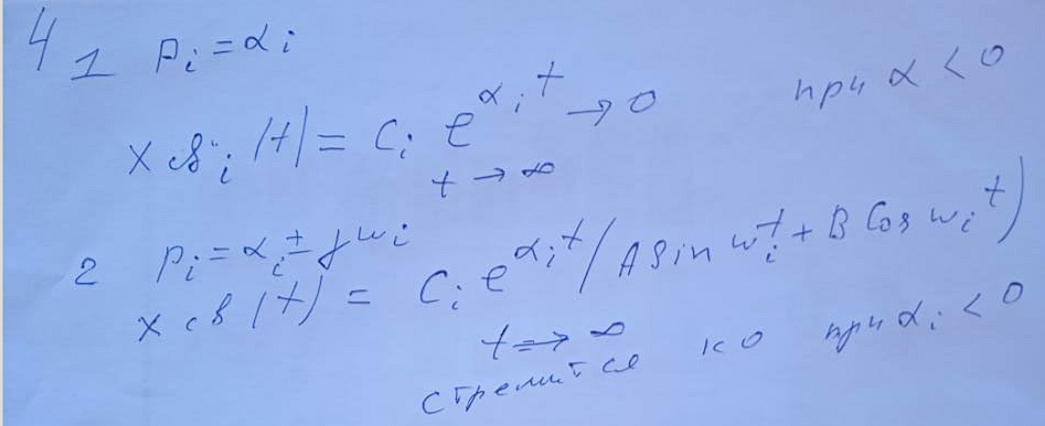
Классический метод решения дифференциальных уравнений.
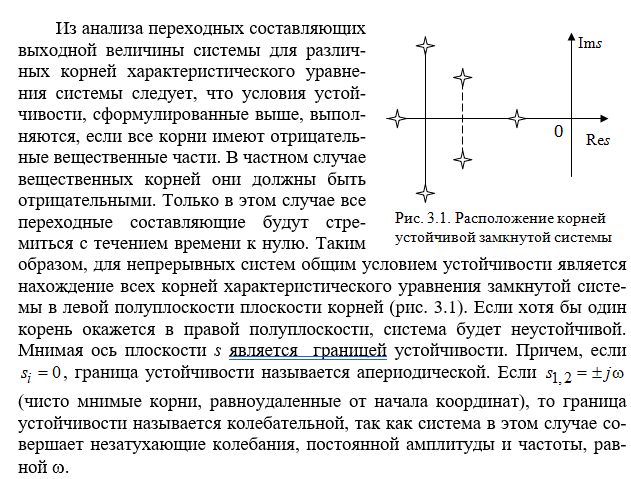
Устойчивость автоматических систем.
Определение устойчивости по корням характеристического уравнения.
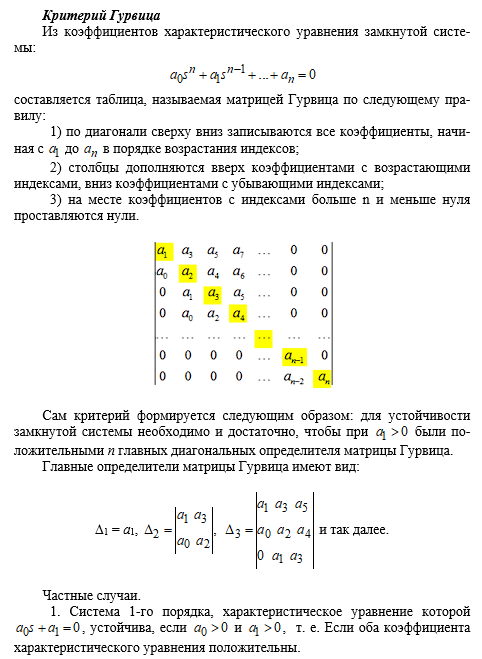
Критерий Гурвица.
Определение критического коэффициента усиления по критерию Гурвица.
Критическим коэффициентом усиления разомкнутой системы называется то значение, при котором замкнутая система выходит на границу устойчивости.
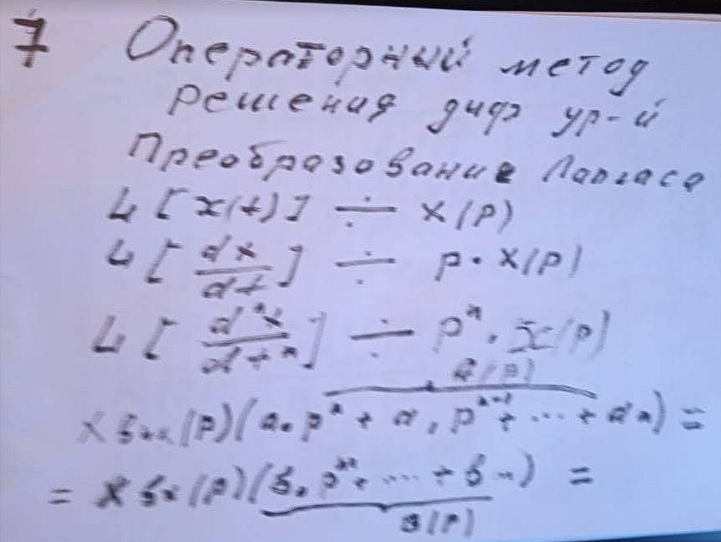
Операторный метод решения дифференциальных уравнений.
См выше.
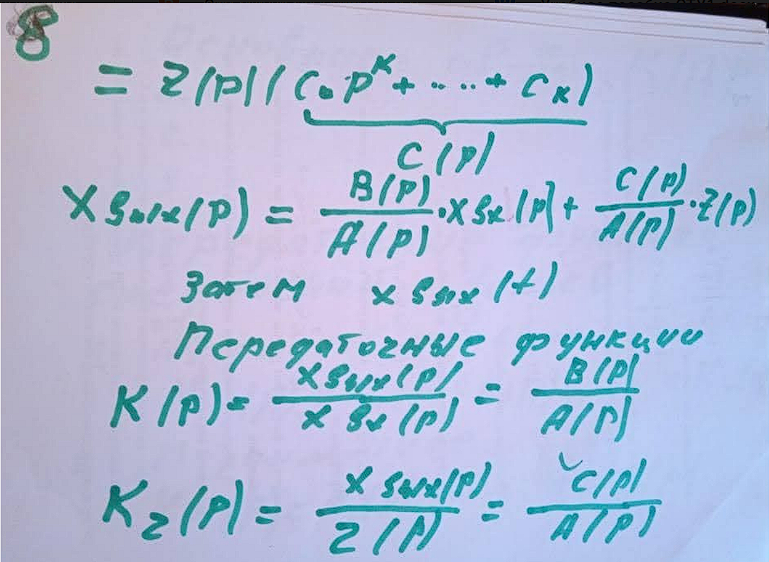
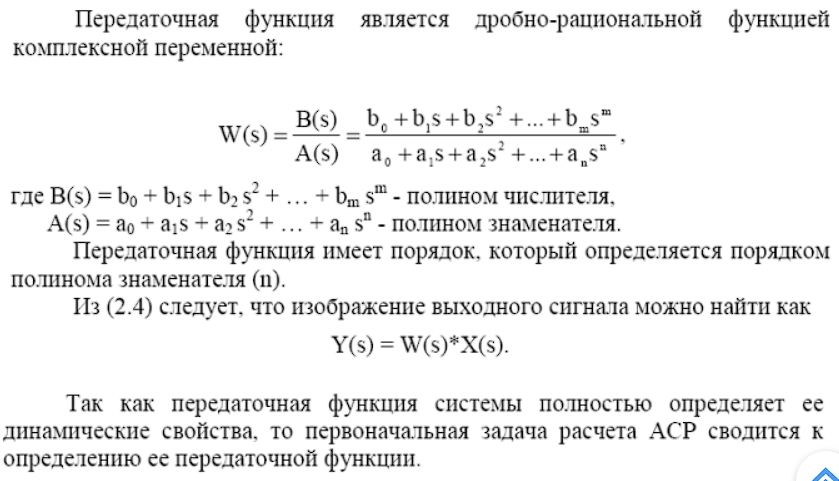
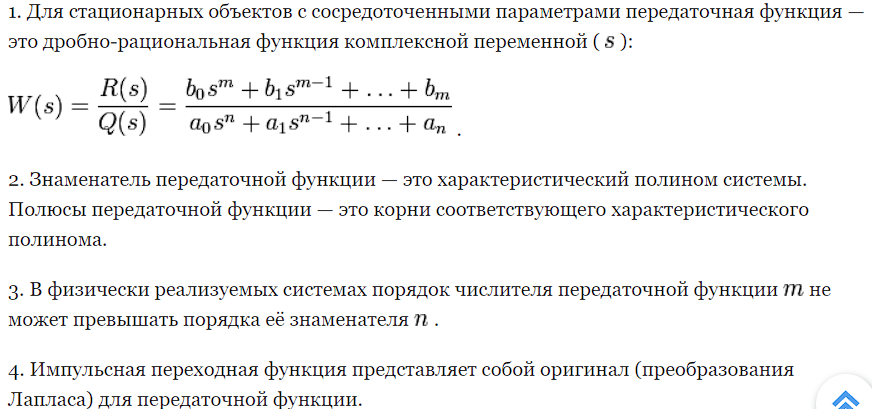
Передаточная функция и ее свойства.

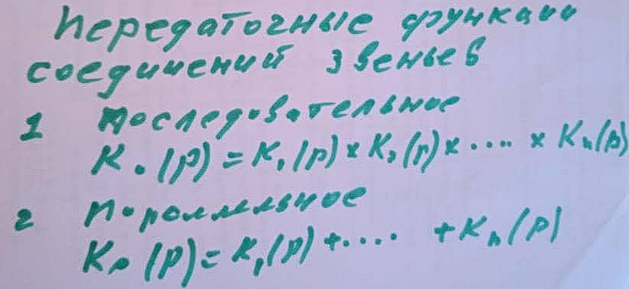
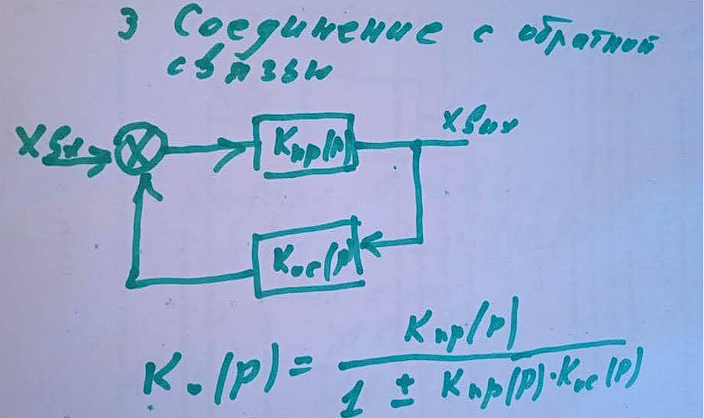
Передаточные функции соединений звеньев.
Частотные характеристики.
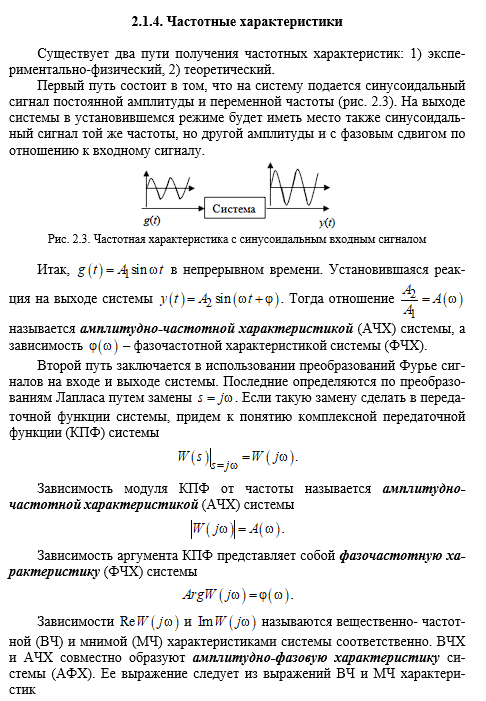

Виды частотных характеристик.
См выше
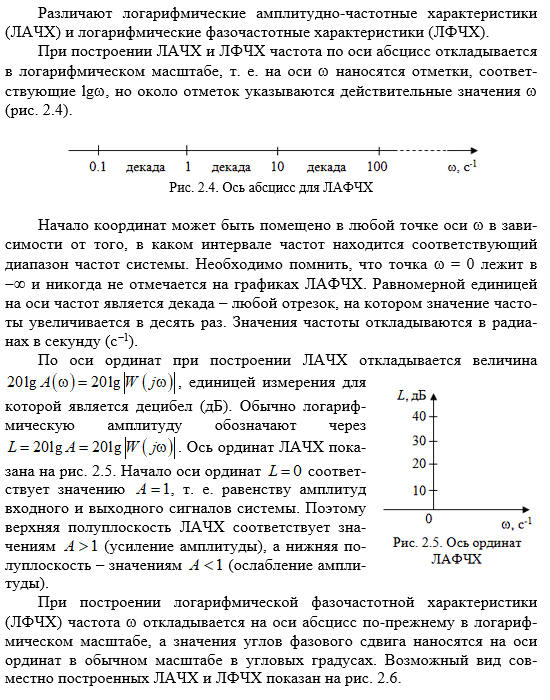
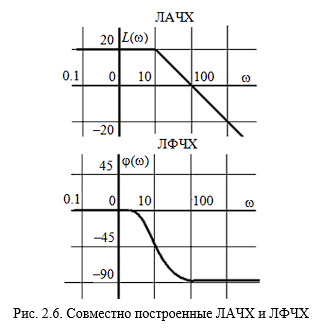
Логарифмические частотные характеристики.
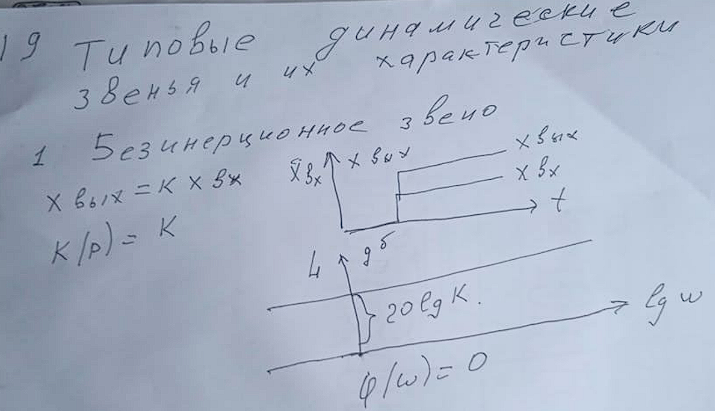
Типовые динамические звенья и их характеристики.
Безынерционное звено.
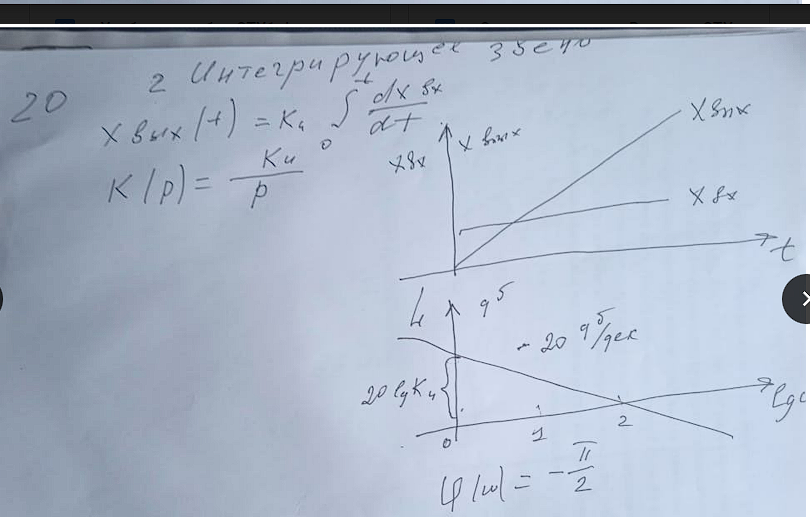
Интегрирующее звено.
Дифференцирующее звено.

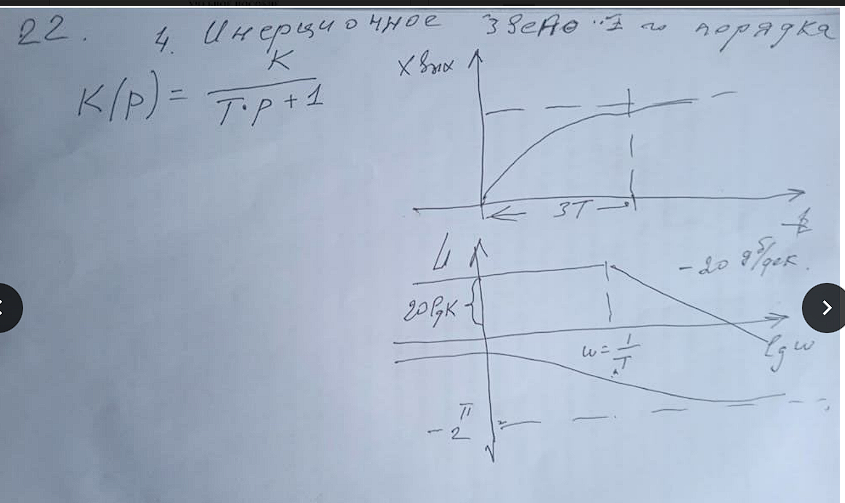
Инерционное звено первого прядка.
Звенья второго порядка.

Частотные критерии устойчивости.
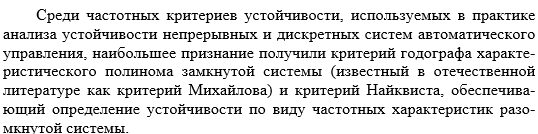
Критерий Найквиста.
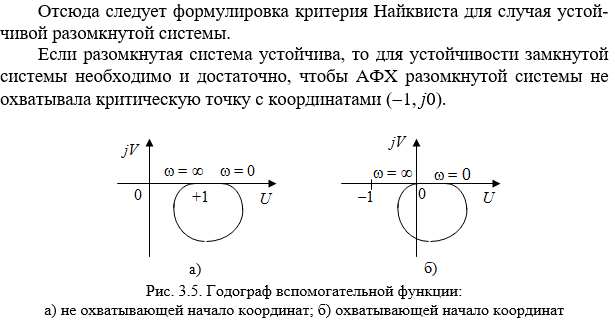
Методы коррекции автоматических систем.
Коррекция (охват) инерционного звена обратной связью.
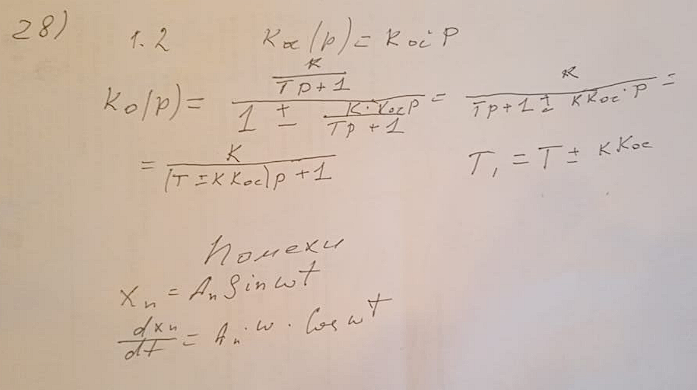
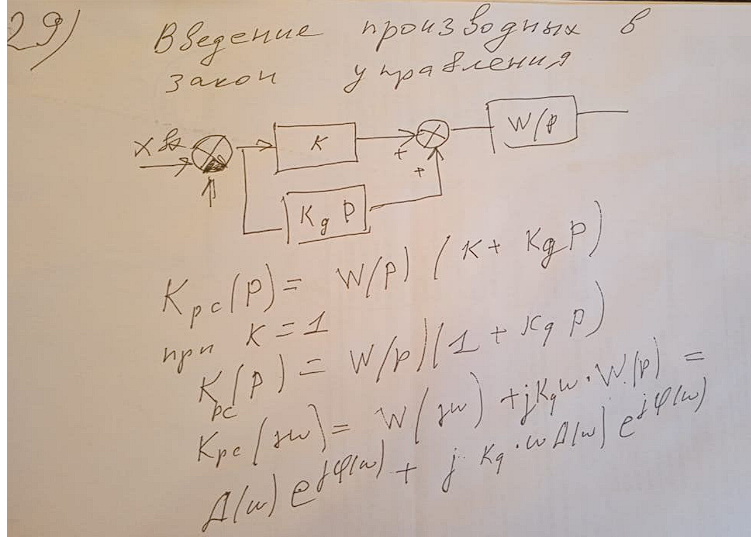
Введение производной и интеграла в закон управления.
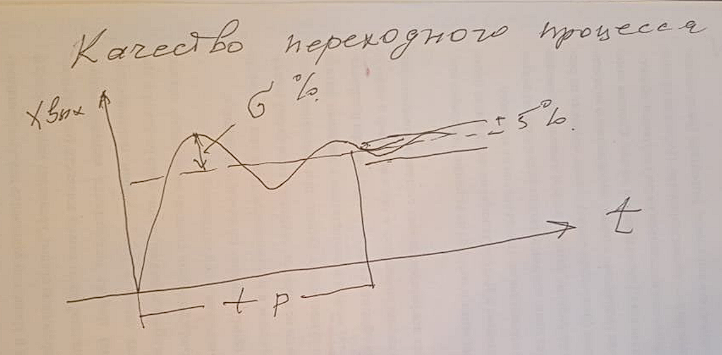
Качественные показатели переходного процесса.
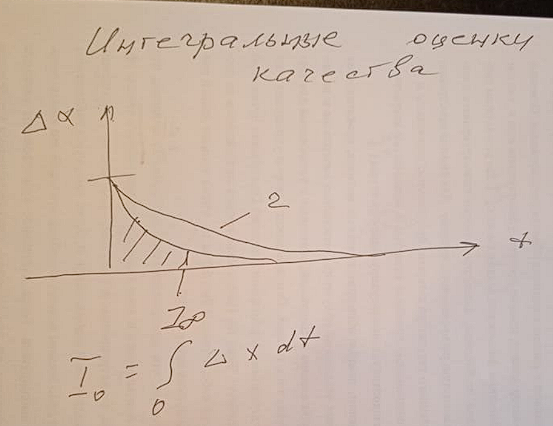
Интегральные оценки качества.
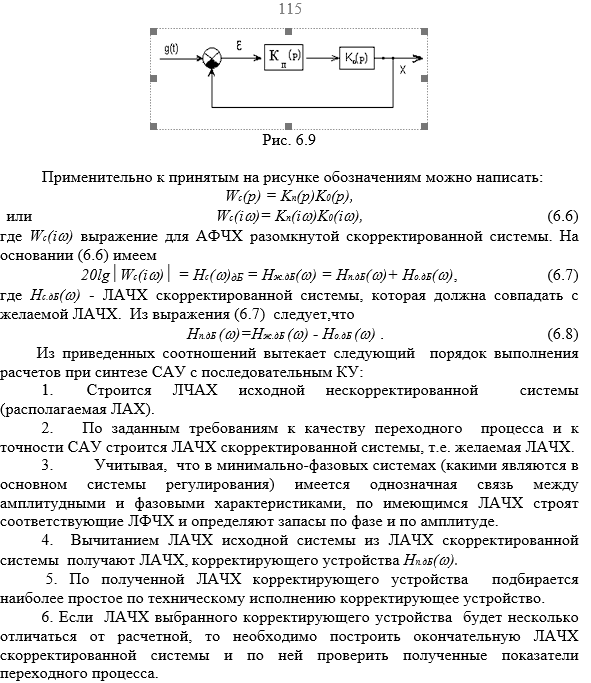
Синтез последовательного корректирующего устройства.
![]()
Нелинейные системы.
Нелинейной системой называется такая система, в которой хотя бы в одном звене нарушается линейность статической характеристики или же имеет место любое другое нарушение линейности уравнений динамики звена (произведение переменных или их производных, корень, квадратный или более высокая степень переменной, либо другая нелинейная связь переменных и их производных).
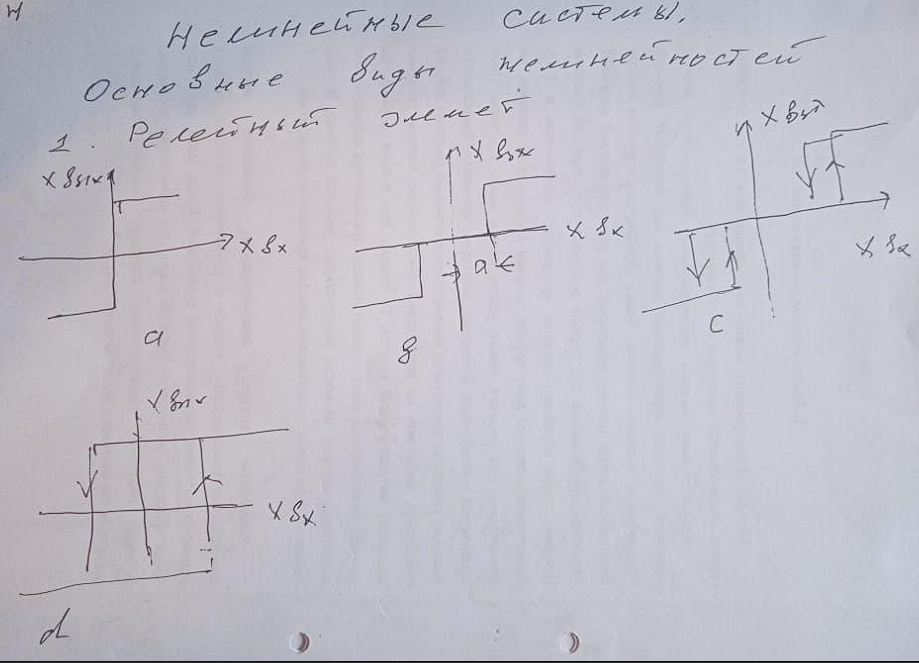
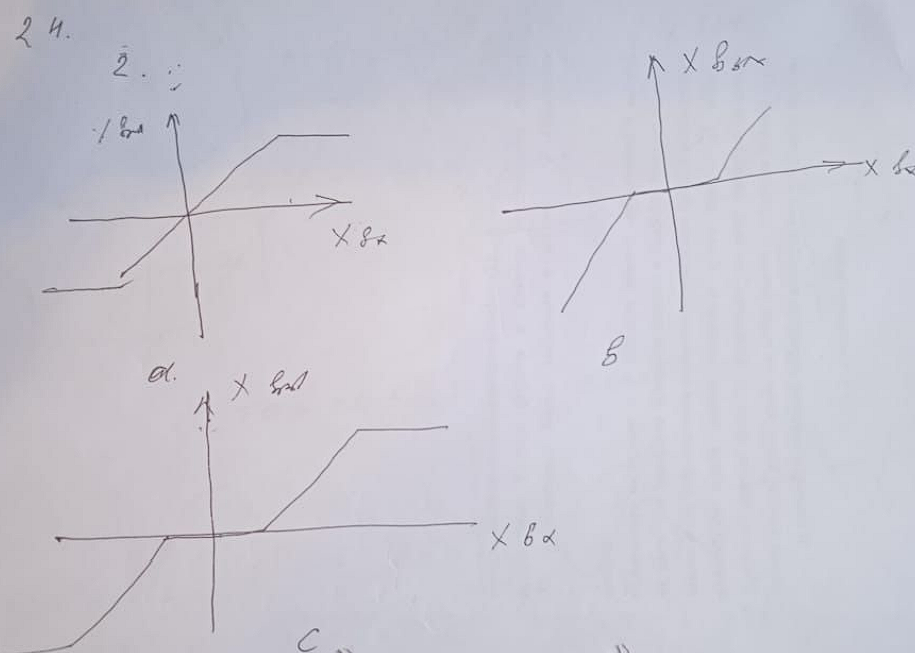
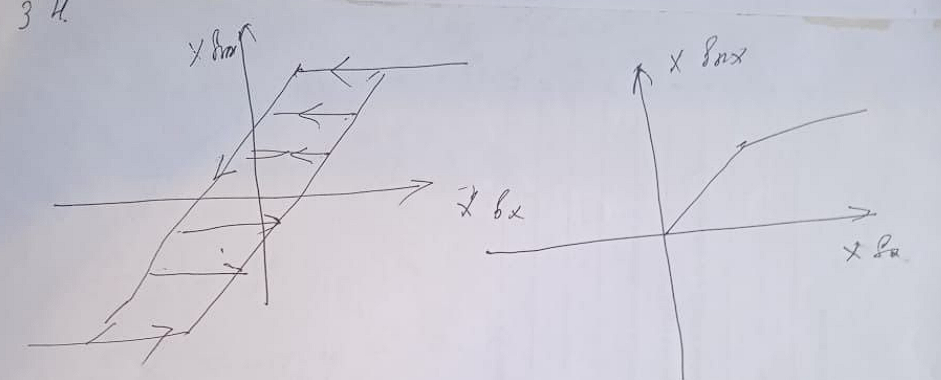
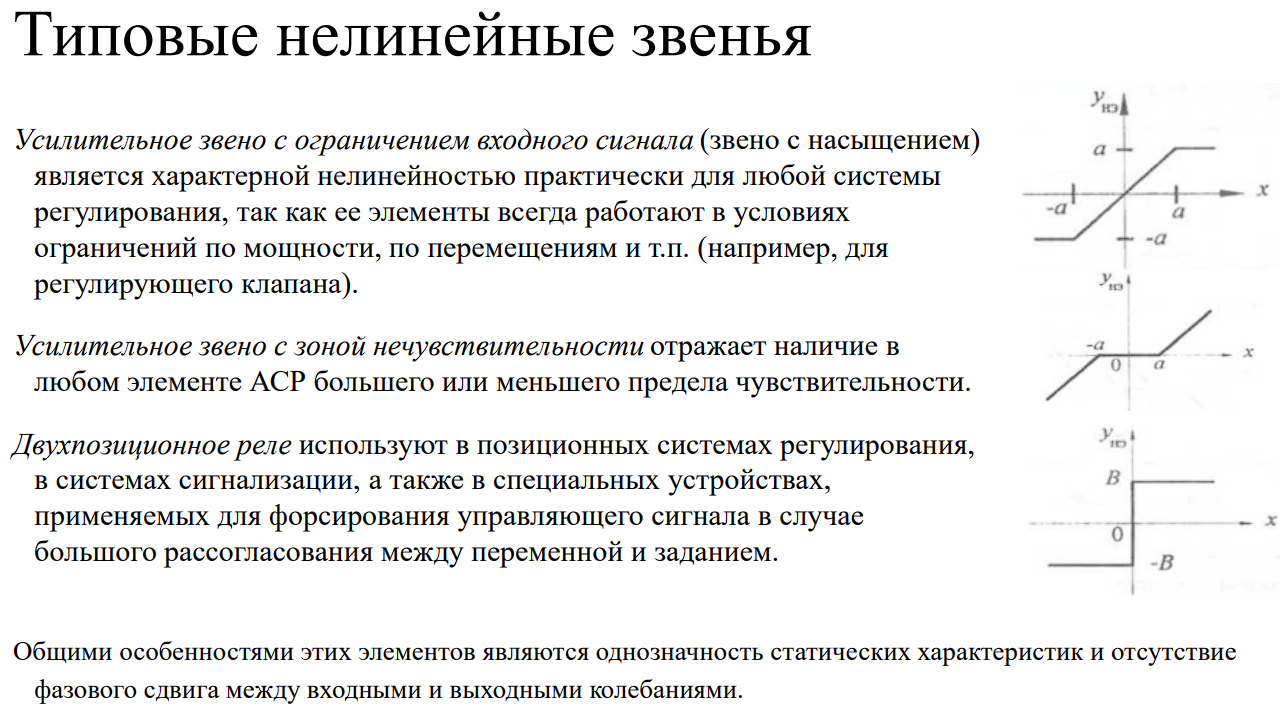
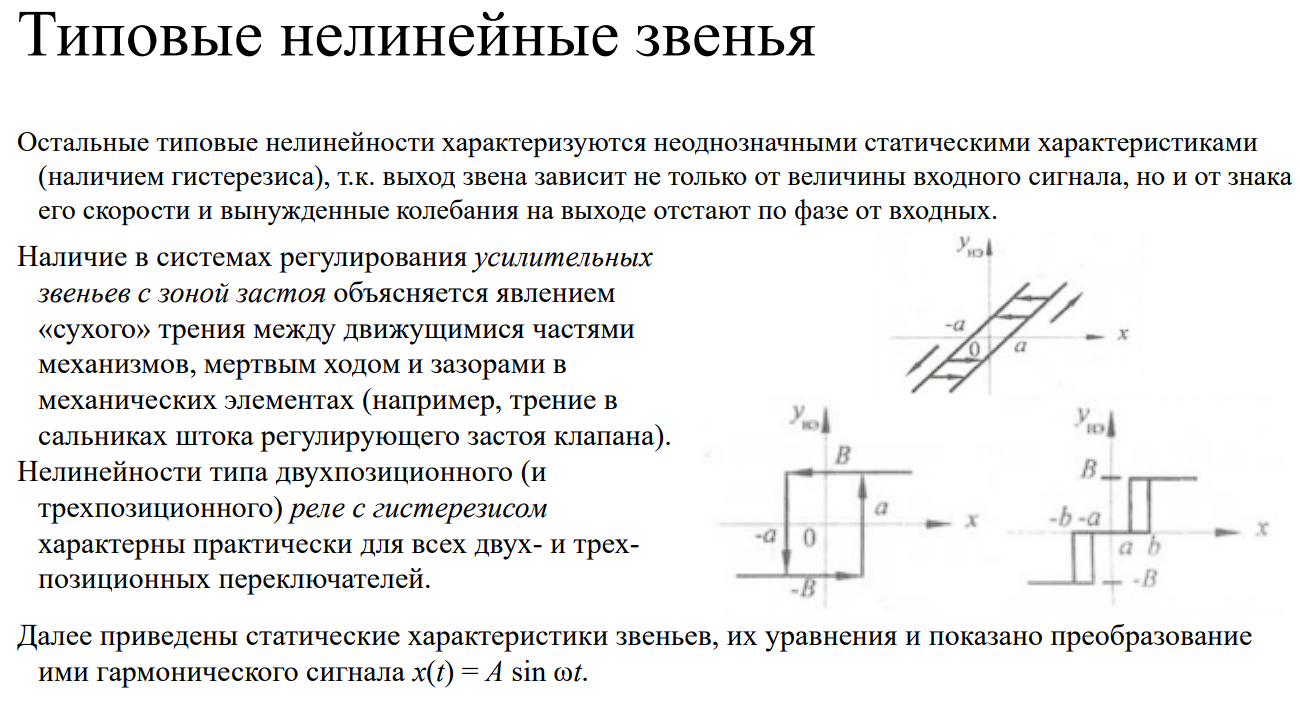
Виды нелинейных элементов.
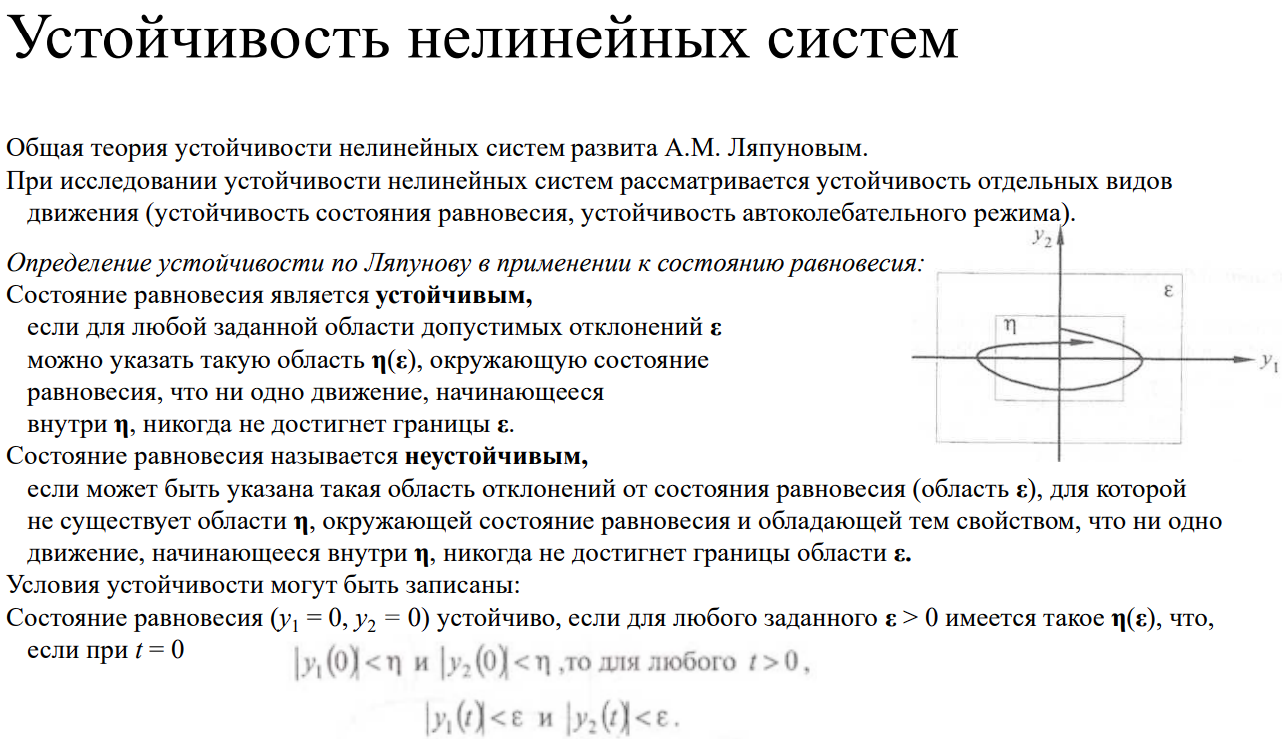
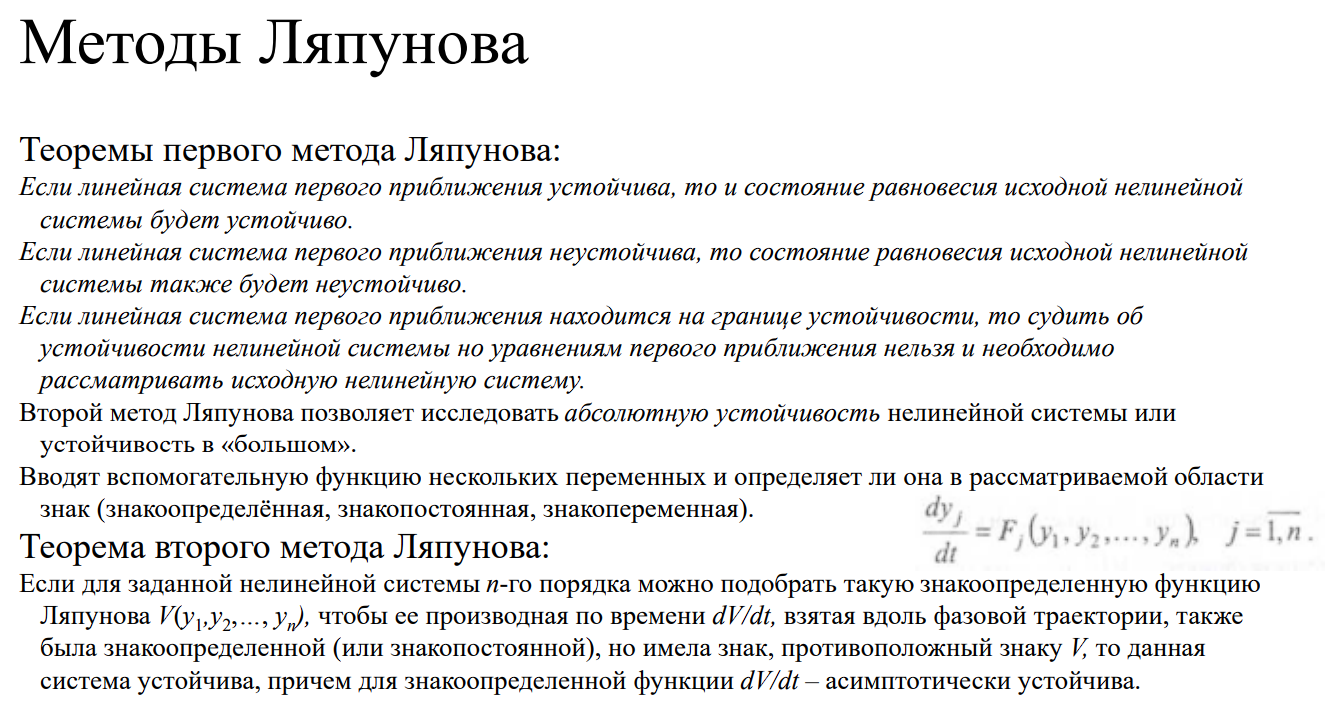
Устойчивость нелинейных систем.

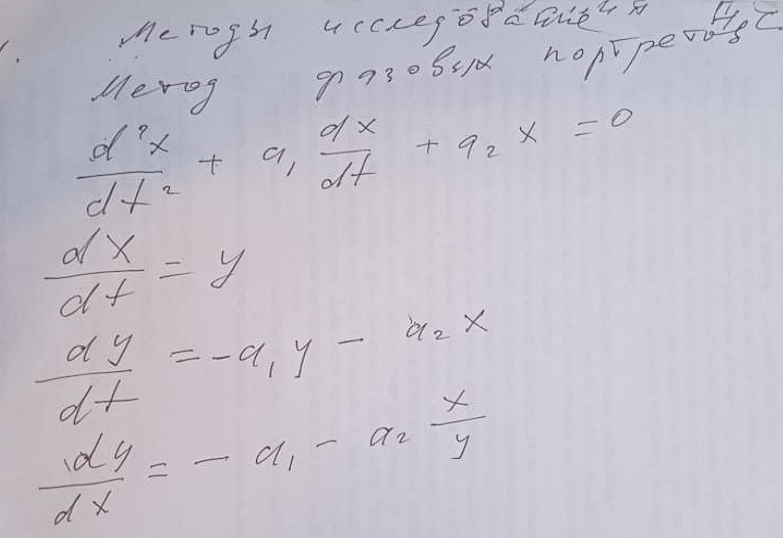
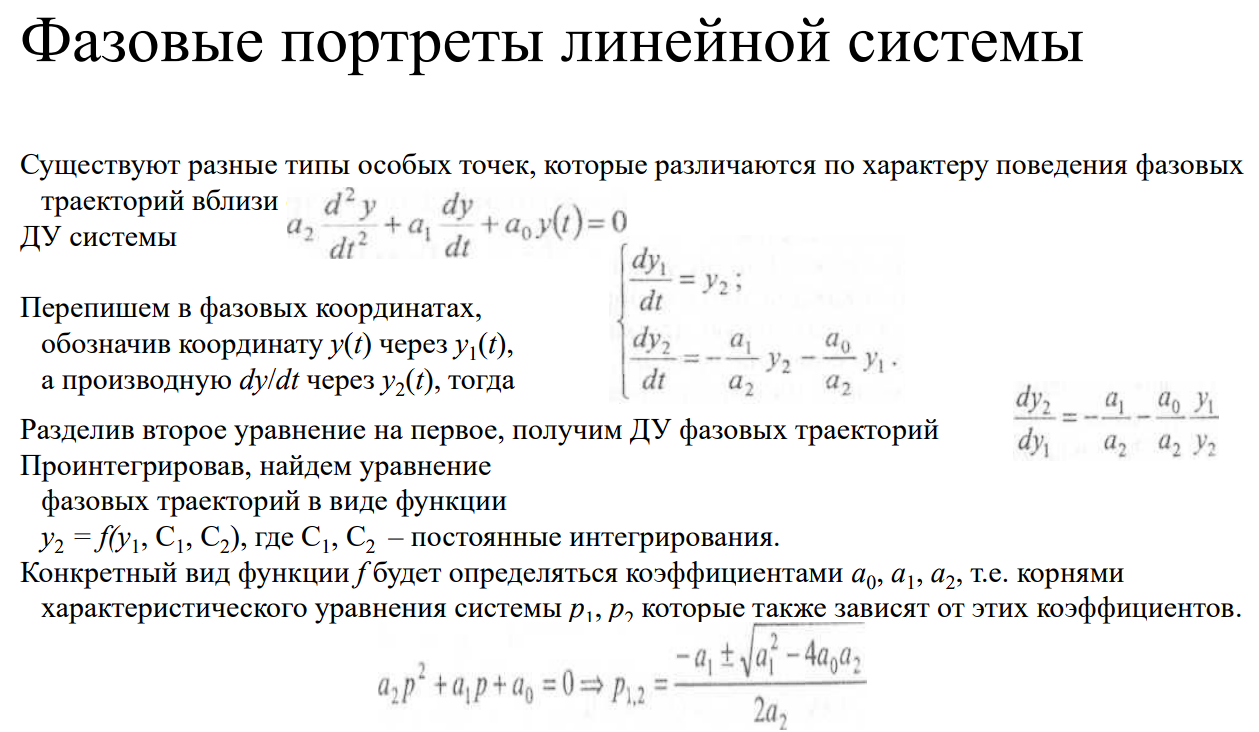
Метод фазового портрета.
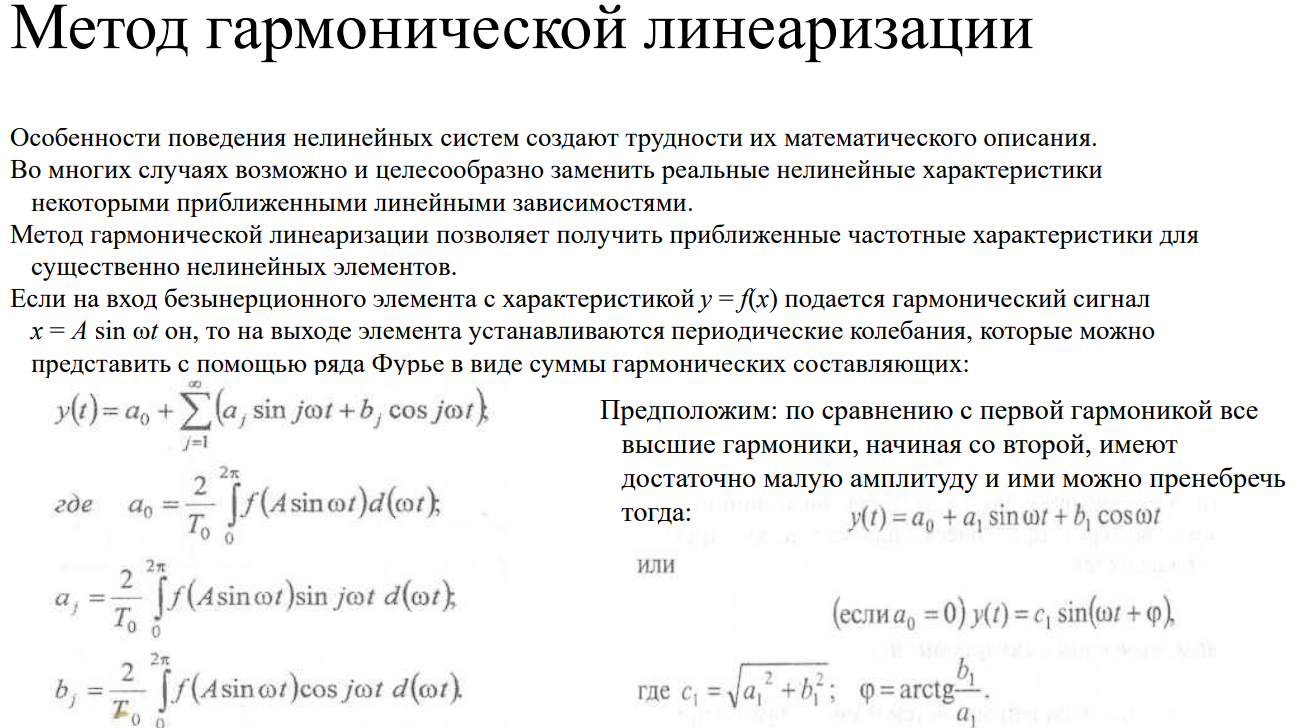
Метод гармонической линеаризации.
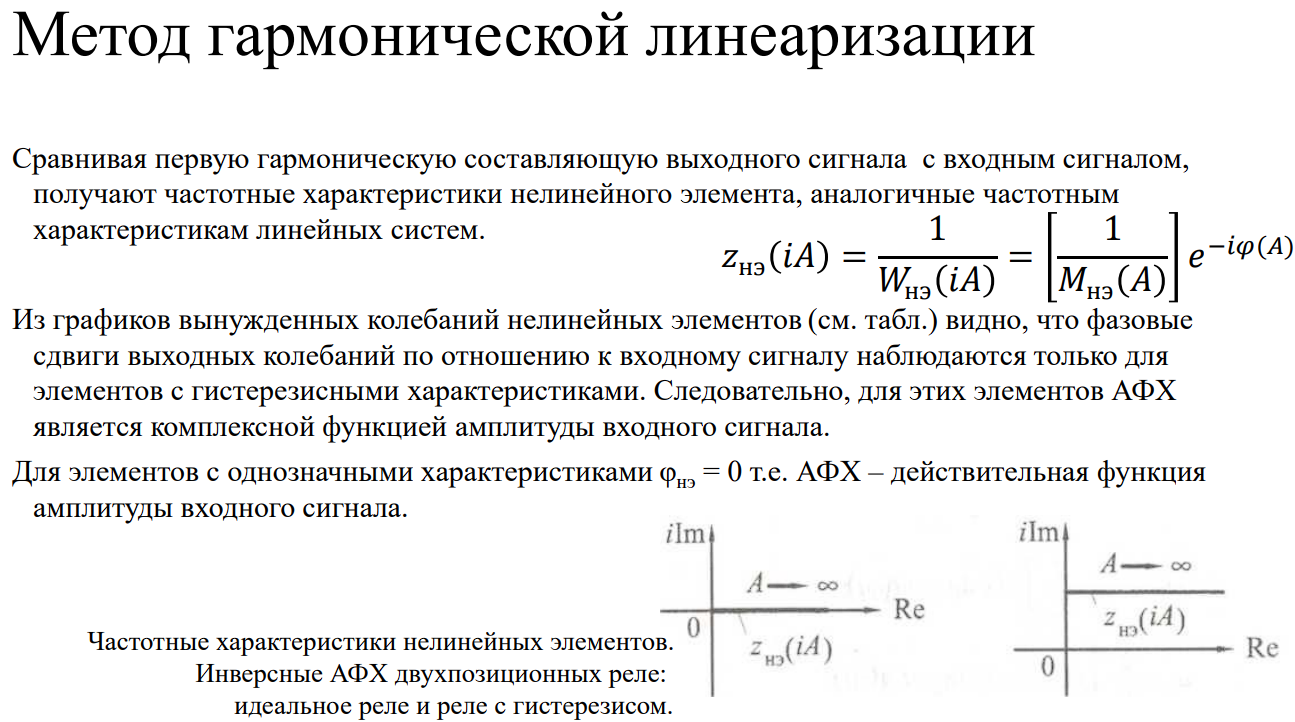
Метод Гольдфарба.
Метод Е. П. Попова.
Дискретные системы.
Виды модуляций.
Методы расчета систем с амплитудно-импульсной модуляцией.
Решетчатые функции, сумма решетчатых функций различного порядка, разность.
Дифференциальные разностные уравнения и их решения.