

радиус-вектор r - вектор, проведенный из начала системы координат в рассматриваемую точку, характеризует положение материальной точки в момент времени t :
![]()
модуль радиус-вектора равен
![]()

Вектор перемещения
материальной точки
![]()
Для характеристики
быстроты изменения положения материальной
точки с течением времени служит вектор
скорости
 ,
направленный всегда по касательноу к
траектории движения
,
направленный всегда по касательноу к
траектории движения
![]()
Вектор средней
скорости
![]() совпадает
по направление с вектором перемещения
за дельта t.
совпадает
по направление с вектором перемещения
за дельта t.
![]() величина характеризующая быстроту
изменения скорости материальной точки
в пространстве с течением времени
величина характеризующая быстроту
изменения скорости материальной точки
в пространстве с течением времени
ПРЯМАЯ ЗАДАЧА КИНЕМАТИКИ: по известной зависимости радиус-вектора r(t) от времени необходимо определить векторы скорости V(t) и ускорения a(t). Эта задача решается путем дифференцирования выражения для радиус-вектора по времени
ОБРАТНАЯ ЗАДАЧА КИНЕМАТИКИ: по известной зависимости ускорения a(t) от времени необходимо определить значения радиус-вектора r(t) и скорости V(t). Эта задача решается путем интегрирования выражения для ускорения по времени (метод неопределенного интеграла)
2. Разложим вектор а
по двум направлениям(по касательной к
траектории движения и по направлению
перпендикулярному касательной)
![]() где
τ,n-единичные векторы,
τ-по направлеению касательной, n-
перпендикулярно касательной
где
τ,n-единичные векторы,
τ-по направлеению касательной, n-
перпендикулярно касательной
-
тангенсальное ускорение (харктеризует
быстроту изменения скорости по величине
 ),
),
-нормальное
ускорение ( харктеризиует быстроту
изменения вектора скорости по направлению
 )
)

Введем элементарное угловое перемещение dϕ за время dt как аксиальный вектор, направление которого воль оси вращения определяется по правилу буравчика

![]() характеризует быстроту вращения тела
вокруг неподвижной оси. Ее направление
совпадает с направлением dϕ
и определяется по правилу буравчика.
характеризует быстроту вращения тела
вокруг неподвижной оси. Ее направление
совпадает с направлением dϕ
и определяется по правилу буравчика.
![]() характеризует
быстроту изменения угловой скорости
тела. В случае неподвижной оси вращения
вектора ускорения и скорости совпадают
по направлению при увскоренном
вращательном движении точек тела и
противонаправлены при замедленновращтельным
движении точек тела
характеризует
быстроту изменения угловой скорости
тела. В случае неподвижной оси вращения
вектора ускорения и скорости совпадают
по направлению при увскоренном
вращательном движении точек тела и
противонаправлены при замедленновращтельным
движении точек тела


Связь между нормальным ускорением и угловой скоростью:

Прямая задача кинематики вращательного движения: по известной зависимости вектора углового перемещения определить векторы угловой скорости и углового ускорения
Обратная задача: по известной зависимости вектора углового ускорения от времени определить векторы угловой скорости и углового перемещения
Первый закон Ньютона: существуют системы отсчета, называемые инерциальными, в которых тело движется равномерно и прямолинейно или сохраняет состояние покоя, если на него не действуют другие тела.
второй закон Ньютона: Скорость изменения импульса материальной точки во времени равна результирующей силе, действующей на материальную точку
![]()
ускорение, с которым движется материальная точка, равно отношению результирующей всех сил, действующих на нее, к массе материальной точки

Третий закон Ньютона: сила, с которыми две материальные точки действуют лруг на друга, имеют одинаковоую природу, всегда равны по величине и направлены в противоположные стороны вдоль прямой, соединяющей эти точки
![]()
Импульс(количество движений)- физическая величина, являющаяся мерой механического движения тела. P=mv
Второй закон Ньютона в импульсной форме: изменение импульса материальной точки за промежуток времени делта t равно импульсу силы, действующему на материальную точку за это время
Инерциальные СО- СО, в которых выполняется первый закон Ньютона

Если СО движется равномерно и прямолинейно относительно инерциальной СО, то новая система отсчета так же является инерциальной
Принцип относительности Галилея: законы механики одинаковы в любых ИСО
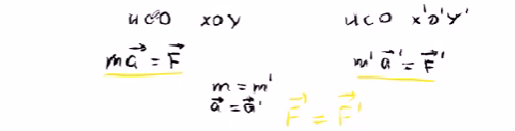
Преобразования Галилея:

R,v-неинвариантные величины
m, a, F-инвариантные величины
Импульс системы материальных точек- векторная сумма импульсов всех тел системы.
Закон изменения импульса системы: изменение импульса системы материальных точек за некоторый промежуток времени равно импульсу результирующей всех внешних сил, действующих на систему за этот промежуток времени.

Закон сохранения импульса системы тел(для замкнутой системы)- импульс системы материальных точек, также остается постоянным, если векторная сумма всех внешних сил, действующих на систему, равна нулю.
Центр масс тела - точка, радиус вектор которой вычисляется по формуле
![]() ,
где Ri- радиус вектор
iматериальной точки с
массой Mi
,
где Ri- радиус вектор
iматериальной точки с
массой Mi
Центр масс тела движется так же, как двигалась бы материальной точка с массой м, равной массетела под действием результирующей всех внешних сил, действующих на тело.
Моментом импульса L материальной точки относительно точки О называется векторное произведение радиус-вектора на вектор импульса материальной точки
![]()
![]()

Вектор Lz называется моментом импульса материальной точки относительно оси.
Момент силы М материальной точки относительно точки О называется векторное произведение радиус-вектора на вектор силы
![]()

Вектор Мz называется вектором момента силы материальной точки относительно оси Z.
Уравнения моментов:
![]() ,
,
 .
.
Моментом импульса системы материальных точек относительно точки или оси называется векторная сумма моментов импульсов вссех материальных точек системы.
Закон сохранения
моментов импульса: если для системы
материльных точек сумма моментов всех
внешних сил относительно оси(точки)
равна нулю, то момент импульса системы
материальных точек относительно оси
(точки) есть величина постоянная
![]()
Ыы
Момент инерцци абсолютно твердого тела относительно оси определяется по формуле
 ,
где р итое-радиус вектор итой
материальной точки с массой дельта м
итое.
,
где р итое-радиус вектор итой
материальной точки с массой дельта м
итое.
Момент инерции диска

Момент инерции обруча
![]()
Теорема Штейнера
Момент инерции тела относительно произвольной оси Z равен сумме момента инерции этого тела относительно оси Zс, параллельной данной и проходящей через центр масс этого тела, и произведению массы тела на квадрат расстояния между осями
![]()

Момент инерцци абсолютно твердого тела относительно оси определяется по формуле
, где р итое-радиус вектор итой материальной точки с массой дельта м итое.
Момент инерции стержня
Разобъем стержень на элементарные участки длинной dr с массой dm=m/l*r^2dr
 всего
стержня
всего
стержня

Относительно оси проходящей через конец стержня


Теорема Штейнера
Момент инерции тела относительно произвольной оси Z равен сумме момента инерции этого тела относительно оси Zс, параллельной данной и проходящей через центр масс этого тела, и произведению массы тела на квадрат расстояния между осями
Работа результирующего момента силы при вращательном движении равна изменению кинетической энергии вращательного движения тела

Работой силы при поступательном движении называется величина равная

Мощность – физическая величина, измеряемая отношением элементарной работы к тому промежутку времени, за который она была совершена
![]()
Между поступательным и вращательным движениями существует аналогия, которая позволяет легко запоминать формулы, относящиеся к вращательному движению.
Основные характеристики поступательного движения: путь S, скорость v, ускорение а и время t. При вращении им соответствуют: угол поворота φ, угловая скорость со, угловое ускорение ε и время t.
Пусть нам нужно написать уравнение равномерного вращательного движения. Вспоминаем формулу S=vt, справедливую для равномерного поступательного движения, и по аналогии пишем уравнение равномерного вращательного движения: φ=ωt. Для равномерного ускоренного (или замедленного) вращения справедливы формулы: угол поворота φ= ω0t±at2/2 и угловая скорость ω=ω0±εt (по аналогии с S=v0t±at2/2 и v=v0±at). В этих формулах знак "плюс" относится к случаю равномерно ускоренного движения, знак "минус" - равномерно замедленного.
Эта аналогия справедлива не только в кинематике, но распространяется и на динамику. Роль массы т при вращении играет момент инерции I, а роль силы F - момент силы L. Основное уравнение динамики вращательного движения Iε=L записывается по аналогии с ma=F, кинетическая энергия вращения Iω2/2 по аналогии с mv2/2 и т. д.
Работой силы при поступательном движении называется величина равная
Вычисление работы силы тяжести

Вычисление работы силы упругости

Работа силы тяготения

Кулона

треания

Сила называется консервативной, если ее работа не зависит от траектории, а определяется только начальным и конечным положениями тела. Работа таких сил по перемещению тела по замкнутой траектории всегда равна нулю.
Энергию, связанную с взаимодействием тел, называют ПОТЕНЦИАЛЬНОЙ ЭНЕРГИЕЙ. Потенциальная энергия характеризует тело относительно силы (силового поля)
Консервативная сила связана с ее потенциальной энергией соотношением:
![]()
Сила тяжести:
![]()
Сила упругости:
 Сила
тяготения и Кулона:
Сила
тяготения и Кулона: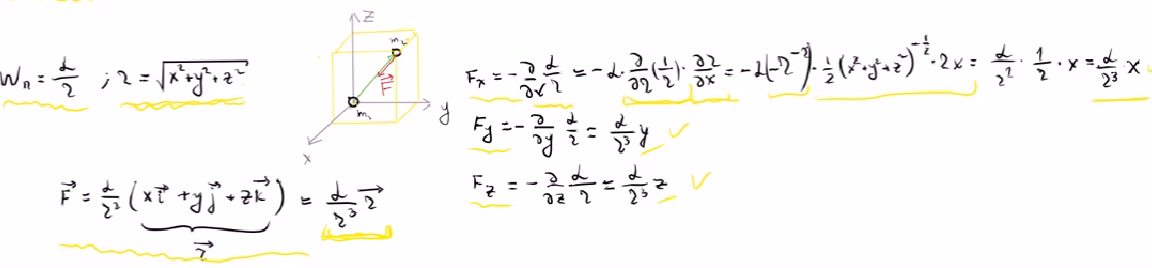
Кинетическая энергия при поступательном движении:

При вращательном движении:
![]()
Теорема о кинетической энергии:
Изменение кинетической энергии равно работе результирующе всех сил, действующих на материальную точку
Изменение полной механической энергии равно работе неконсервативных сил
Если работа неконсервативных сил равно нулю, то полная механическая энергия сохраняется.
Закон всемирного тяготения
все тела притягиваются друг к другу, сила всемирного тяготения прямо пропорциональна произведению масс тел и обратно пропорциональна квадрату расстояния между ними.
![]()
Связь силы тяготения и силы тяжести и их потенциальных энергий:

Сила тяготения вблизи поверхности Земли переходит в силу тяжести
Вблизи поверхности Земли потенциальные энергии силы тяжести и силы тяготения различаются на константу.
Первая космическая скорость (тело совершает движение вокруг поверхности земли не падая на землю):


Вторая космическая скорость (минимальгая скорость, про котором тело улетает с поверхности земли):


Электростатика
Электрический заряд – физическая величина, определяющая свойство частиц или тел вступать в электромагнитные силовые взаимодействия.
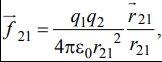
Закон Кулона:
сила взаимодействия между двумя неподвижными точечными зарядами пропорциональна величине зарядов и обратно пропорциональна квадрату расстояния между ними (в вакууме).
Векторная форма
Напряженность – силовая характеристика поля, равная силе, действующей на пробный заряд, помещенный в данную точку поля, деленной на величину этого заряда.

Принцип суперпозиции для напряженности: напряженность поля, создаваемого системой точечных зарядов в данной точке, равна векторной сумме напряженностей полей, создаваемых каждым из зарядов системы в отдельности в этой точке
Силовая линия (СЛ) – линия, в каждой точке которой вектор напряженности поля направлен по касательной к этой линии.
Свойства силовых линий:
- начинаются на положительных зарядах и заканчиваются на отрицательных;
- не пересекаются.
Пример силовых линий(радиальные)

Напряженность поля, создаваемого точечным диполем.
Диполь-система двух одинаковых по модулю , противоположных по знаку точечных заряда, находящихся на фиксированном расстоянии друг от друга. Характеризуется дипольным моментом p=lq, где l-плечо диполя)расстояние)

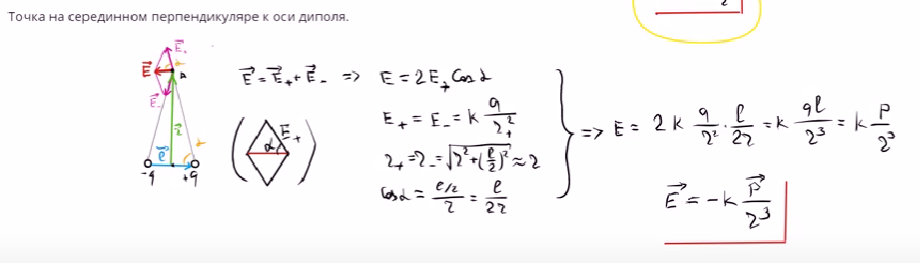

1)Спадение напряжения, создаваемого диполем
![]()
2)Напряжение на оси диполя в два раза больше, чем на серединном перпендикуляре.
Диполь в однородном поле:

E-напряженность p-дипольный момент(p=lq)
Угол=0-устойчивое положение равновесия(М=0) Угол=180-неустойчивое(М=0)
В неоднородном поле:

Сила, действующая на диполь пропорциональна производной напряженность по координате (величине неоднородности)
Чем более неоднородно поле, тем больше оно действует на диполь. И диполь втягивается в область более сильного поля.
Энергия диполя в электрическом поле

Элементарный поток вектора напряженности вычисляется по формуле
![]()
Где Еn-проекция вектора напряженности на направление нормали к площадке dS.
Потоком вектора напряженности через поверхность s называется сумма элементарных потоков через все площадки, на которые разбита поверхность

Теорема Островского-Гаусса:
поток вектора напряженности электрического поля через произвольную замкнутую поверхность равен алгебраической сумме зарядов, заключенных внутри этой поверхности, деленной на ε0
Напряженность сферы

Разность потенциалов сферы

Напряженность внутри сферического конденсатора

Поле вне цилиндра
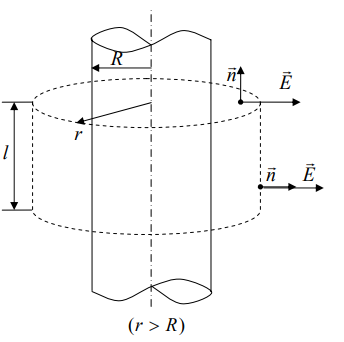

Внутри цилиндра:

Цилиндрический конденсатор
E=0, r<R1
E= ,
R1<r<R2
,
R1<r<R2
E=0, r>R2
Разность потенциалов

Напряженность плоскости

Разность потенциалов

Плоский конденсатор

Напряженность шара внутри

Снаружи так же как сферы
Разность потенциалов

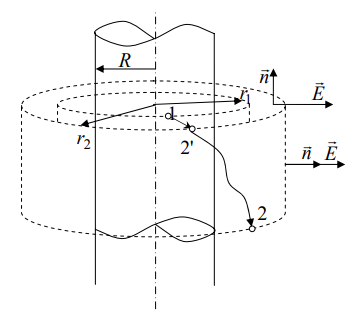
Работа сил по перемещению заряда

Потенциал поля, создаваемый системой точечных зарядов в данной точке, равен потенциальной энергии взаимодействия пробного заряда со всеми зарядами, деленной на величину пробного заряда.

Разность потенциалов – величина, равная работе сил поля по перемещению пробного заряда из одной точки в другую, деленной на величину этого заряда.

Энергия взаимодействия системы зарядов

Связь напряженности поля и потенциала поля
Разность потенциалов как интеграл от напряженности электростатического поля:

Напряженность электростатического поля как градиент потенциала:
Диэлектрики - вещества, плохо проводящие электрический ток.
Диэлектрик состоит из атомов и молекул. Положительный заряд сосредоточен в ядрах атомов, а отрицательный в электронных оболочках атомов и молекул. Молекула в целом электрически нейтральна: положительный заряд всех ядер молекул равен суммарному заряду электронов.
В диэлектрике практически нет свободных носителей заряда. Таким образом, в диэлектрике можно пренебречь влиянием свободных электронов. Заряды, входящие в состав молекул диэлектрика, называются связанными.
Виды диэлектриков: полярный, неполярный, кристаллический
Поляризацией называется процесс, в результате которого сумма электрических дипольных моментов молекул диэлектрика становится отличной от нуля.
Для характеристики явления поляризации вводят вектор поляризации (измеряется в Кл/м 2 )
 где
дельта V-физически малый
объем(поле в нем можно считать однородным)
где
дельта V-физически малый
объем(поле в нем можно считать однородным)
Свзяь вектора поляризации и поверхностной плотности связанных зарядов:
Для вычисления модуля вектора поляризации выделим в диэлектрике физически малый объем ΔV в виде прямого цилиндра, ось которого параллельна силовым линиям поля, длина равна l, площадь основания dS. Рассматриваемый объем можно представить как электрический диполь с зарядом σ'dS и плечом диполя, равным l.Тогда модуль вектора поляризации


Формулу для P можно преобразовать к следующему виду:
 где
N – число молекул в объеме ΔV ; pl –
дипольный момент молекулы; n – концентрация
молекул.
где
N – число молекул в объеме ΔV ; pl –
дипольный момент молекулы; n – концентрация
молекул.
Принимая во внимание, что для неполярных молекул pl=αε0Е , получим прямо пропорциональную зависимость между P и E : P=Еκε0 , где к – диэлектрическая восприимчивость (безразмерная величина, большая нуля). Такая же связь между κ P и E справедлива и для диэлектриков, состоящих из полярных молекул. К Для диэлектриков, состоящих из неполярных молекул, не зависит от температуры. κ Для диэлектриков, состоящих из полярных молекул, κ ~1\Т