

11. Билинейные и квадратичные формы
11.1. Билинейные формы
Определение 11.1. Билинейной формой называется функция (отображение) f: V V R (или C), где V – произвольное векторное пространство, и для любых векторов x, y V и любого числа λ R (или C) выполняются соотношения
f(x + y, z) = f(x, y) + f(z, y),
f(x, y + z) = f(x, y) + f(x, z),
f(λx, y) = λf(x, y),
f(x, λy) = λf(x, y).
Обозначим число, получаемое в результате отображения пары векторов x и y, как A(x, y) .
Определение 11.2. Билинейная форма A(x, y) называется симметрической, если для любых x, y V выполняется: A(x, y) = A(y, x).
Определение 11.3. Билинейная форма A(x, y) называется кососимметрической, если для любых x, y V выполняется: A(x, y) = –A(y, x).
Свойства билинейных форм
Любую билинейную форму можно представить в виде суммы симметричной кососимметричной форм.
При выбранном базисе e1, e2, …, en в векторном пространстве V любая билинейная форма A однозначно определяется матрицей
A(е) = 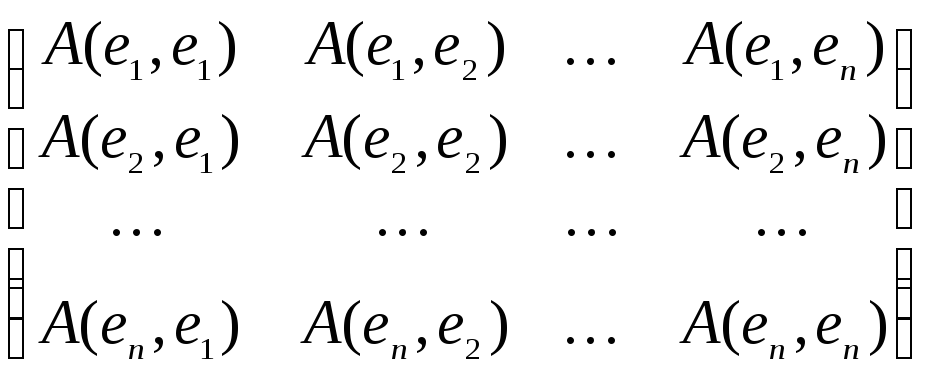 ,
,
так, что для любых x = x1e1 + x2e2 + … + xnen, y = y1e1 + y2e2 + … + ynen;
A(x,
y) = (x1 x2 … xn)
![]() ,
то
есть
,
то
есть
A(x,
y) = ![]() ,где
Аij = A(ei,
ej). (1)
,где
Аij = A(ei,
ej). (1)
Вид (1) назовем общим видом билинейной формы в n-мерном векторном пространстве.
Замечание. Если билинейная форма A(x, y) симметрическая, то и матрица (Aij) будет симметрической, то есть Aij = Aji для i, j = 1, 2, …, n. Если билинейная форма A(x, y) кососимметрическая, то и матрица (Aij) будет кососимметрической, то есть Aij = –Aji для i, j = 1, 2, …, n.
Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы
Пусть в векторном пространстве V заданы два базиса e = {e1, e2, …, en} и f = {f1, f2, …, fn}. Пусть A(e) = (аij) и A(f) = (bij) – матрицы билинейной формы A в указанных базисах.
Теорема 11.1. Матрицы A(e) и A(f) билинейной формы A(x, y) в базисах {e} и {f} связаны соотношением
A(f) = CtA(e)C, (),
где C – матрица перехода от базиса {e} к базису {f}, а Ct –транспонированная матрица C.
Следствие. Ранг матрицы A(f) равен рангу матрицы A(e).
Это утверждение следует из равенства (): так как С – матрица перехода от одного базиса к другому, то матрица С и матрица Ct– невырожденные, поэтому умножение на них матрицы A(e) не меняет ее ранга.
Определение 11.4. Рангом билинейной формы, заданной в конечномерном векторном пространстве V , называется ранг матрицы этой формы в произвольном базисе пространства V.
Определение 11.5. Билинейная форма называется невырожденной, если ее ранг равен размерности пространства V и вырожденной, если ее ранг меньше размерности пространства V.
11.2. Квадратичные формы
Пусть A(x, y) – симметрическая билинейная форма, заданная на векторном пространстве V.
Определение 11.6. Квадратичной формой называется числовая функция одного векторного аргумента x, которая получается из билинейной формы A(x, y) при x = y.
Определение 11.7. Симметрическая билинейная форма A(x, y) называется полярной квадратичной форме A(x, x).
Пусть
дана билинейная форма A(x,
y) = ![]() ,
положим
в ней xi = yj,
тогда мы получим представление
квадратичной формы A(x,
x)
в конечномерном векторном пространстве
V
с заданным базисом {e}:
,
положим
в ней xi = yj,
тогда мы получим представление
квадратичной формы A(x,
x)
в конечномерном векторном пространстве
V
с заданным базисом {e}:
A(x,
x) = ![]() . (2)
. (2)
Определение 11.8. Матрица (aij) называется матрицей квадратичной формы A(x, x) в заданном базисе {e}.
При переходе к новому базису матрица квадратичной формы преобразуется по формуле A(f) = CtA(e)C и ранг этой матрицы не меняется при переходе к новому базису.
Определение 11.9. Ранг матрицы квадратичной формы A(x, x) называется рангом квадратичной формы.
Определение 11.10. Квадратичная форма называется невырожденной, если ее ранг равен размерности пространства V и вырожденной, если ее ранг меньше размерности пространства V.
Определение 11.11. Квадратичная форма A(x, x) называется
Положительно определенной, если для любого ненулевого вектора x выполняется неравенство A(x, x) > 0.
Отрицательно определенной, если для любого ненулевого вектора x выполняется неравенство A(x, x) < 0.
Знакопеременной, если существуют такие x и y, что A(x, x) > 0 и A(y, y) < 0.
Квазизнакоопределенной, если для всех x, A(x, x) ≥ 0 (или A(x, x) ≤ 0) и имеется вектор x ≠ 0, для которого A(x, x) = 0.
Замечание. Если A(x, y) – билинейная форма, полярная положительно определенной квадратичной форме A(x, x), то A(x, y) удовлетворяет аксиомам скалярного произведения векторов в евклидовом пространстве:
A(x, y) = A(y, x) – в силу симметричности A(x, x).
A(x + y, z) = A(x, z) + A(y, z) – в силу определения билинейной формы.
A(λx, y) = λA(x, y) – в силу определения билинейной формы.
A(x, x) ≥ 0 и A(x, x) > 0 при х ≠ 0, т. к. A(x, x) положительно определена.
Вывод. Скалярное произведение в векторных пространствах может быть задано с помощью билинейной формы:
(x,
y) = ![]() = A(x,
y).
= A(x,
y).