

ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
Морской государственный университет им. адм. Г. И. Невельского
Кафедра теоретической механики и сопротивления материалов
СВОБОДНОЕ ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА
Конспект лекциии
|
Составил В. Г. Непейвода |
Владивосток |
|
2011 |
1 |
Содержание
1.Уравнения свободного движения тела
2.Скорость точки тела при свободном движении
3.Ускорение точки тела при свободном движении
2

1. Уравнения свободного движения тела
Свободным называется такое движение тела, при котором его перемещения не ограничены другими телами.
3
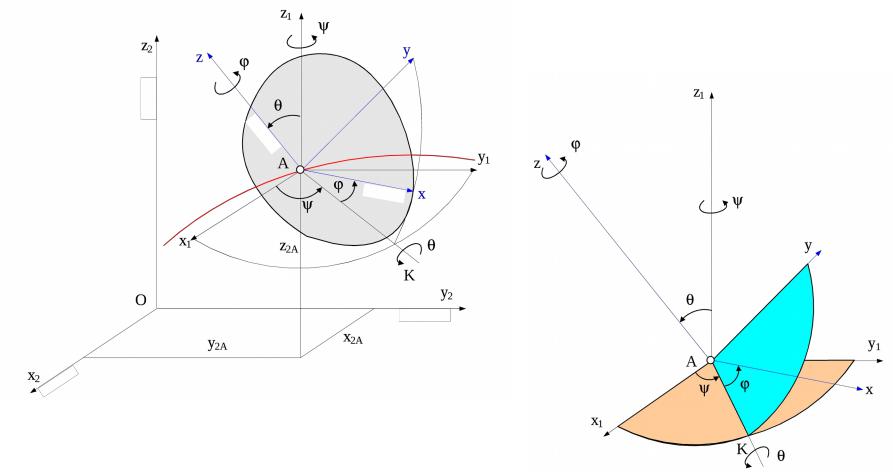
Движение свободного тела можно представить как совокуп- ность двух движений: поступательного движения вместе с полюсом (любой точкой тела) и сферического движения вокруг полюса.
x2 A f1(t); y2 A f2 (t); z2 A f3 (t);
f4 (t); f5 (t); f6 (t).
4
Сферическое движение тела вокруг полюса можно заменить вращательным движением вокруг мгновенной оси вращения.
Следовательно, свободное движение тела является суммой двух движений: поступательного движения вместе с полюсом и совокупности элементарных поворотов вокруг подвижной
мгновенной оси вращения, проходящей через полюс. |
5 |
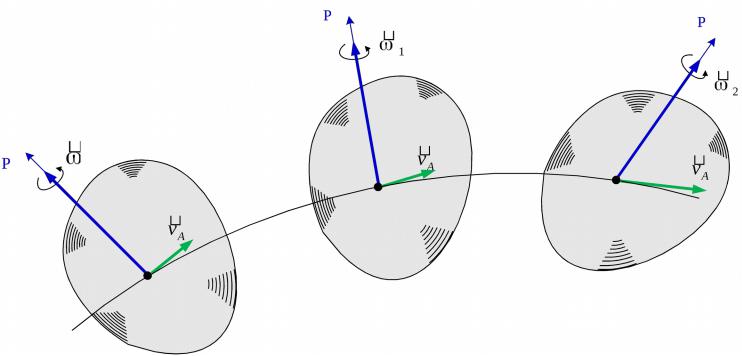
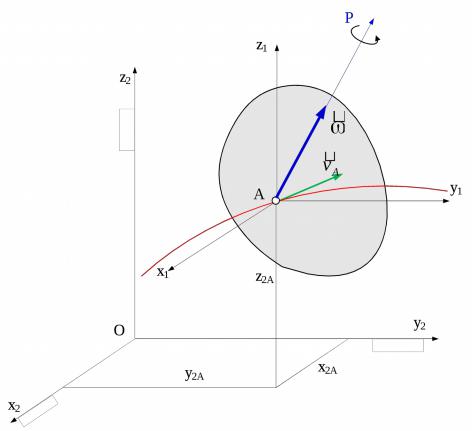
Такой будет картина движения любого непоступательно перемещающегося в воздухе тела: брошенного камня, самолёта, артиллерийского снаряда, судна на морском волнении и т. д.
6

2. Скорость точки тела при свободном движении
vrM =vrA +rvMA; vMA =w´ rM ;
vMA =w×rM ×sina =w×hw;
vM = |
2 2 |
r r |
vA +vMA +2vAvMA cos vA ,vMA . |
||
7
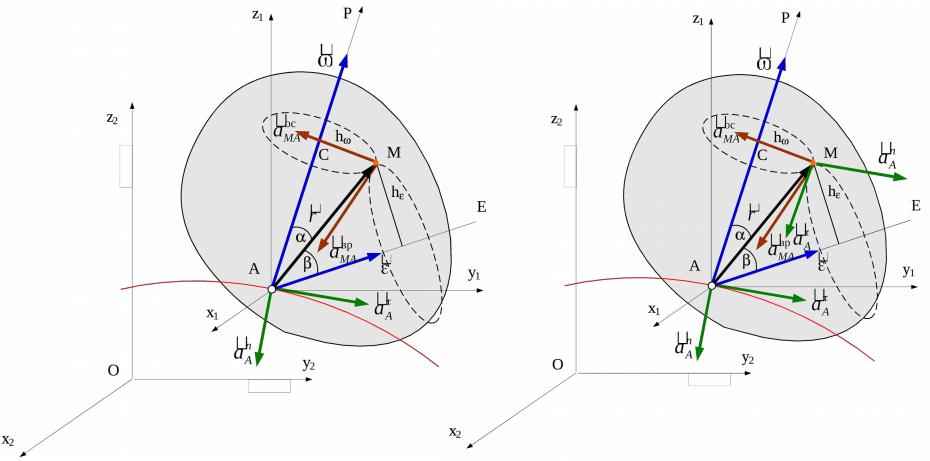
3. Ускорение точки тела при свободном движении
aM = aA +aMA; 8

r = rвр + rос aMA aMA aMA ;
9

rвр |
r r |
; |
|
|
|
|
|
aMA |
= e´ rM |
r r |
|
|
|
||
|
вр |
|
( |
|
|
|
|
|
MA |
|
· |
( |
) |
e |
|
a |
|
M ) |
|||||
|
=e××r sin |
e,r |
=e××r sin |
b =e×h ; |
|||
10
rос |
r r |
aMA |
=w´ vMA ; |
aMAос |
=w×vMA =w×w×hw =w2hw; |
11

aMA = |
вр |
2 |
|
ос |
2 |
вр ос |
|
rвр r |
ос |
; |
aMA |
|
+ aMA |
|
+2aMAaMA cos aMA ,aMA |
||||||
aMA = e he |
+w hw |
+2ehew hwcos aMA ,aMA |
; |
|
||||||
|
2 2 |
|
4 |
2 |
|
2 |
rt |
rn |
|
|
aM = |
2 2 |
r r |
aA +aMA +2aAaMA cos aA ,aMA . |
||
12