

ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
Морской государственный университет им. адм. Г. И. Невельского
Кафедра теоретической механики и сопротивления материалов
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Конспект лекции
|
Составил В. Г. Непейвода |
Владивосток |
|
2011 |
1 |
Содержание
1.Относительное, переносное и абсолютное движения
2.Теорема сложения скоростей
3.Теорема сложения ускорений при переносном вращательном движении
4.Ускорение Кориолиса
5.Теорема сложения ускорений при переносном поступательном движении
2
1. Относительное, переносное и абсолютное движения точки
Движение точки, которое рассматривается одновременно по отношению к двум и более системам отсчёта называется сложным.
В большинстве случаев рассматривается движение точки относительно двух систем отсчёта.
При исследовании движения точки, относительно двух систем отсчёта одна из них (основная) принимается условно за неподвижную. Другая движется относительно основной системы отсчёта и поэтому называется подвижной системой отсчёта.
3
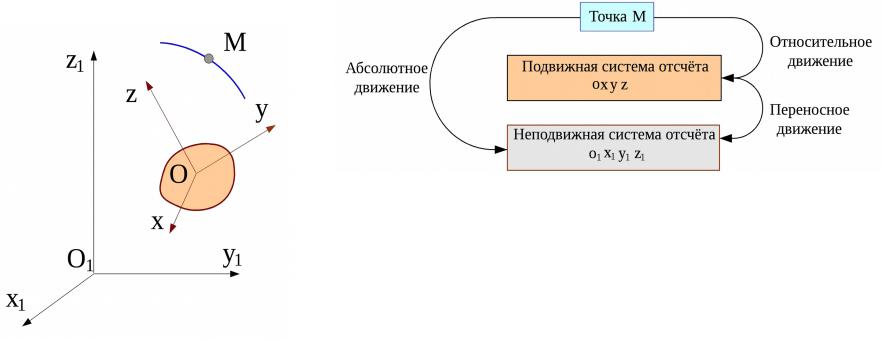
Движение точки относительно подвижной системы отсчёта называется относительным.
Движение подвижной системы отсчёта относительно неподвижной называется переносным.
Движение точки относительно неподвижной системы отсчёта
называется абсолютным. |
4 |
|

Движение точки относительно подвижной системы отсчёта называется относительным.
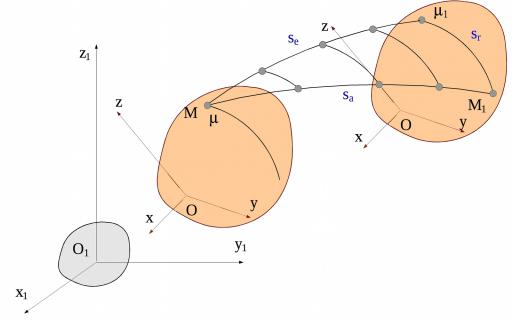
Траектория, которую описывает точка в относительном движении называется относительной траекторией. Переме- щение точки по относительной траектории называется отно- сительным перемещением и обозначается (sr).
Кинематические характеристики этого движения называются
соответственно относительной скоростью (vr), и относитель- |
|
ным ускорением (ar). |
5 |
|
|
Движение подвижной системы отсчёта относительно неподвижной называется переносным.
Траектория, точки , подвижной системы отсчёта с которой в данный момент совпадает рассматриваемая точка М называется траекторией переносного движения.
Перемещение точки по траектории переносного движения называется переносным перемещением и обозначается (sе).
6
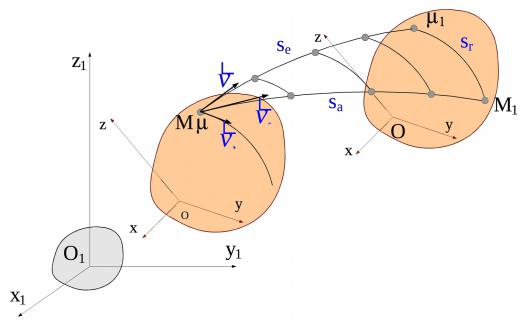
Скорость точки подвижной системы отсчёта, с которой в данный момент совпадает рассматриваемая точка М, называется переносной скоростью и обозначается (vе) .
Ускорение точки подвижной системы отсчёта, с которой в данный момент совпадает рассматриваемая точка М, называется переносным ускорением и обозначается (ае) .
7

2. Теорема сложения скоростей
r vr
r |
r; |
r |
|
r |
r0 |
r |
|
r |
ix jy kz; |
||
Остановим переносное (вращательное) движение тела. В этом случае выполняются условия:
r0 const; i , j,k const.
Учитывая эти условия, найдём относительную скорость точки:
|
d |
|
dr |
r dx |
r dy |
|
r dz |
. |
|||
dt |
dt |
i |
dt |
j |
dt |
k |
dt |
||||
|
|
|
|
|
|
|
|||||
|
|
vr ivrx jvry kvrz . |
|
|
8 |
||||||
Остановим относительное движение точки. В этом случае
выполняются условия:
x, y, z const.
Учитывая эти условия, найдём переносную скорость точки:
r |
d |
|
dr0 |
|
di |
x |
dj |
y |
dk |
z. |
vе |
dt |
dt |
dt |
dt |
dt |
|||||
|
|
|
|
|
|
Найдём абсолютную скорость точки, учитывая, что при абсолютном движении все величины, через которые выражается радиус вектор являются функциями времени:
r0 r r0 ix jy kz;
r |
dr0 |
r dx |
x |
di |
r dy |
y |
dj |
r dz |
z |
dk |
. |
|||
va |
dt |
i |
dt |
dt |
j |
dt |
dt |
k |
dt |
dt |
||||
|
|
|
|
|
|
|
9 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В полученном выражении выделим две суммы. Первая сумма равна относительной скорости:
rdx r dy r dz r i dt j dt k dt vr .
Вторая сумма равна переносной скорости:
dr0 |
x |
di |
y |
dj |
z |
dk |
r |
dt |
dt |
dt |
dt |
ve . |
|||
|
|
|
|
Таким образом, при сложном движении точки её абсолютная скорость равна геометрической сумме двух скоростей: относительной и переносной.
r r r va vr ve .
Полученная формула отражает теорему сложения скоростей
при сложном движении точки. |
10 |