Лекция 7. Адаптивные устройства подавления помех 7.1. Основы адаптивного подавления помех
Рис. 7.1. Обобщённая схема подавления помех
Сигнал s передается по каналу на приемное устройство, которое принимает смесь сигнала и некоррелированной с ним помехи п0. Смесь сигнала и помехи
s + п0 является входным сигналом устройства подавления. Другое приемное устройство принимает помеху п1, некоррелированную с сигналом, но некоторым неизвестным образом коррелированную с помехой п0.
В нем формируется «эталонный сигнал» для устройства подавления. В результате фильтрации помехи п1, формируется сигнал у,
который приблизительно представляет собой копию п0. Этот сигнал вычитается из входного сигнала s + п0 для того, чтобы сформировать выходной сигнал системы s + п0 - у.
В общем случае при известных характеристиках каналов, по которым помеха поступает на оба приемных устройства, можно синтезировать фильтр с постоянными параметрами, преобразующий п1 в у = п0. Тогда
выходной сигнал фильтра можно вычесть из входного сигнала, и на выходе системы останется один сигнал s.
Однако применение фильтра с постоянными параметрами не обеспечивает гибкости, поскольку считают, что характеристики трактов передачи или неизвестны, или известны только приблизительно и могут изменяться. Более того, даже если фильтр с постоянными параметрами обеспечивает гибкость, его параметры нужно настраивать с точностью, которая трудно реализуется, и малейшая ошибка может привести к увеличению на выходе системы мощности помехи.
В приведенной на рис. 7.1 системе эталонный сигнал обрабатывается адаптивным фильтром, который автоматически перестраивает свою собственную импульсную характеристику по одному из среднеквадратических алгоритмов (например, по методу наименьших квадратов), функционирующему по сигналу ошибки, зависящему помимо всего прочего, от выходного сигнала фильтра. Таким образом, при правильном алгоритме фильтр может работать в изменяющихся условиях и перестраиваться для минимизации сигнала ошибки.
Практическое назначение систем подавления помех –
формирование выходного сигнала системы s + n0 - y который имеет наилучшее в среднеквадратическом смысле приближение к сигналу s.
Другими словами, в системе с адаптивным подавлением помех сигналом ошибки адаптивного процесса является выходной сигнал системы.
Можно предположить, что для синтеза фильтра или его адаптации с целью формирования сигнала у, компенсирующего помеху, необходимы некоторые априорные сведения о сигнале s или помехах п0 и п1. Однако как
будет показано далее, этого не требуется или почти не требуется.
Пусть s, п0, п1 и у – стационарные случайные процессы с нулевыми
средними значениями, и s не коррелирован с п0 |
и п1, а п0 и п1 – |
коррелированы. Выходной сигнал |
|
ε = s + n0 - y. |
(7.1) |
Возведем обе части равенства в квадрат: |
|
ε2 = s2 + (n0 - y) 2 + 2s (n0 - у). |
(7.2) |
Для обеих частей (7.2) найдем математическое ожидание и, поскольку s не коррелирован с n0 и у, получим
E[ε2] = E[s2] + Е[(n0 - у)2] + 2E[s(n0 - у)] = E[s2] + Е[(n0 - у)2] |
(7.3) |
Мощность сигнала E[s2] не изменяется при перестройке фильтра в процессе минимизации E[s2]. В соответствии с этим минимальная мощность выходного сигнала
Emin[ε2] = E[s2] + Еmin[(n0 - у)2] |
(7.4) |
Если фильтр построен так, что E[s2] минимально, то, следовательно, минимально также и Е[(n0 - у)2]. В этом случае выходной сигнал фильтра у
является наилучшей среднеквадратической оценкой помехи n0. Более того, при минимальном значении Е[(n0 - у)2] минимальное значение имеет также и E[(ε - s)2], поскольку из (7.1)
(ε - s) = (n - у). |
(7.5) |
Таким образом, перестройка или адаптация фильтра для минимизации общей мощности выходного сигнала равносильна тому, что при заданных структуре адаптивного фильтра и эталонном входном сигнале выходной сигнал ε изменяется так, что он является наилучшим в среднеквадратическом смысле приближением сигнала s.
В общем случае выходной сигнал ε равен сумме сигнала s и некоторой помехи. В соответствии с (7.1) помеха на выходе равна п0 - у. Поскольку при
минимизации E[ε2] осуществляется минимизация E[(n0 - у)2], то минимизация
общей мощности выходного сигнала приводит к минимизации мощности помехи на выходе и, так как сигнал на выходе остается постоянным, к максимизации выходного отношения сигнал-помеха.
Из (7.3) и (7.4) видно, что наименьшая возможная мощность выходного сигнала Emin[ε2] = E[s2]. Если это достижимо, то E[(n0 - у)2] = 0. Следовательно, у = п0 и ε = s, и минимизация мощности выходного сигнала
приводит к тому, что сигнал совершенно не искажен помехой.
Кроме того, если эталонный сигнал совсем не коррелирован с входным сигналом, то фильтр отключается и не увеличивает помеху на выходе. В этом случае выходной сигнал фильтра у не коррелирован с входным сигналом и мощность выходного сигнала
E[ε2] = E[(s + n0) 2] + 2E [ -у (s + n0)] + E[y2] = -E[(s + n0)2]+ E[y2]. (7.6)
Для минимизации мощности выходного сигнала необходимо, чтобы было минимальным E[y2], что достигается при равенстве всех весовых коэффициентов нулю, приводящим к тому, что E[y2] = 0.
Эти рассуждения легко распространить на случай, когда входной и эталонный сигналы содержат, помимо n0 и п1 составляющие аддитивного
случайного шума, не коррелированные между собой и с s, n0 и п1. Кроме того, эти рассуждения справедливы для случая, когда n0 и п1 – детерминированные, а не случайные сигналы.
7.2. Адаптивный режекторный фильтр
Иногда входной сигнал представляет собой сумму составляющей сигнала и аддитивной синусоидальной помехи. Обычно для подавления такой помехи используется режекторный фильтр.
На рис. 7.2. приведена схема устройства подавления одночастотной помехи с двумя адаптивными весовыми коэффициентами.
Преимущества такого режекторного фильтра заключаются в том, что он позволяет регулировать полосу частот, формировать нули и осуществлять адаптивное слежение за точным значением частоты и фазы помехи.
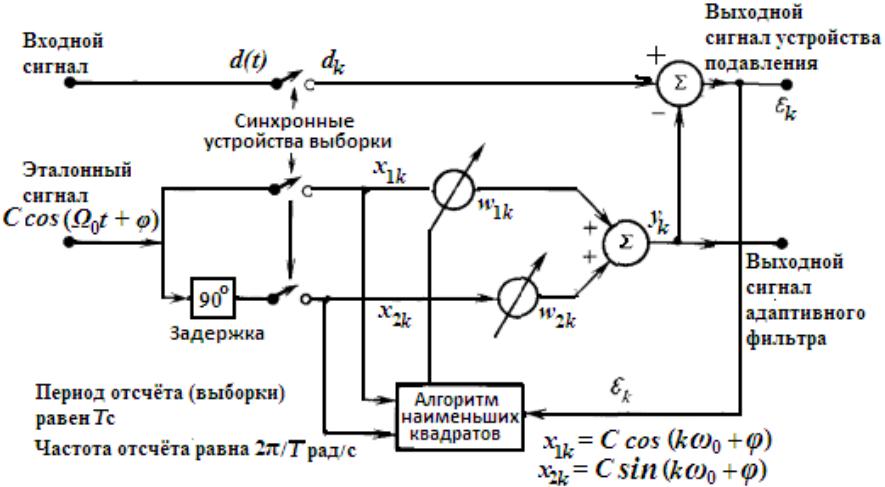
Рис. 7.2. Одночастотный адаптивный режекторный фильтр

Положим, что на вход устройства может подаваться сигнал любого вида – случайный, детерминированный, периодический, импульсный и т. д. – или любая комбинация этих сигналов. На эталонном входе действует чистый синусоидальный сигнал C∙cos(Ω0t + φ). Отсчеты входных сигналов
берутся с интервалами Т секунд. Здесь x1k – отсчеты эталонного сигнала, а x2k – отсчеты этого сигнала, сдвинутого по фазе на 90°.
Рассматривая прохождение сигнала от входа до выхода системы на рис. 7.2, можно найти линейную передаточную функцию устройства подавления помех. При замкнутой петле обратной связи передаточная функция устройства подавления помех
(7.7)
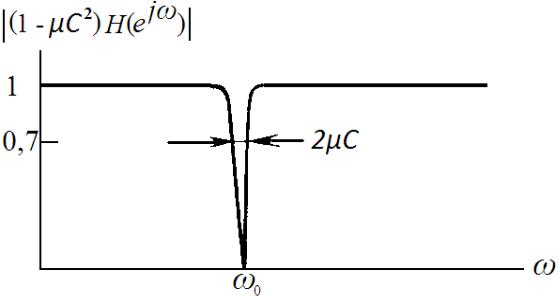
Из равенства (7.7) следует, что на частоте ω0 эталонного сигнала
устройство подавления одночастотной помехи обладает свойствами режекторного фильтра. Нули передаточной функции расположены на z- плоскости в точках
z = e±jωo |
(7.8) |
т. е. точно на окружности единичного радиуса под углами ±ω0 радиан.

Форма провала АЧХ определяется расстоянием, которое приблизительно равно μС2. Длина дуги окружности единичного радиуса, заключенной между точками половинной мощности, соответствует полосе режекции фильтра и равна
BW = 2μС2 рад = μС2/πT Гц. |
(7.11) |
Форма АЧХ в полосе режекции обычно определяется добротностью Q, представляющей собой отношение центральной частоты к ширине полосы режекции:
(7.12)
Таким образом, устройство подавления одночастотной помехи при синусоидальном эталонном сигнале эквивалентно устойчивому режекторному фильтру. В общем случае глубина режекции адаптивного устройства выше, поскольку в результате адаптивного процесса даже при медленном изменении частоты эталонного сигнала поддерживается правильное для подавления соотношение фаз.