

ИГ / КЛАССИФИКАЦИЯ кривых поверхностейt
.pdf100  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
цилиндра, называется шагом винтовой линии. Делим окружность (горизонтальную проекцию цилиндра) на 8 частей (рис. 127). Шаг кривой Н тоже делим на 8 частей. Точка при вращательном пере! мещении на одну восьмую часть окружности поднимается вдоль оси цилиндра на восьмую часть шага Н. Фронтальная проекция винтовой цилиндрической линии есть синусоида.
|
|
B2 |
|
|
|
72 |
|
|
62 |
52 |
|
|
|
|
|
|
|
42 |
H |
1/8H |
|
32 |
|
|
|
22 |
|
|
|
|
|
|
|
|
12 |
|
|
O2 |
|
|
|
41 |
|
|
|
51 |
31 |
|
61 |
|
21 |
|
|
71 |
11 |
|
|
B1 ≡O1 |
|
Рис. 127
8.4. Кривые поверхности. Их класификация
В начертательной геометрии кривую поверхность принято рас
сматривать как совокупность всех последовательных положений не прерывно перемещающихся в пространстве линий. Такая линия на! зывается образующей. Если поверхность образуется движением кривой линии, то ее называют нелинейчатой. Линейчатые повер! хности, у которых две соседние образующие параллельны или пе! ресекаются, считают развертываемыми. Остальные линейчатые и все нелинейчатые поверхности — неразвертываемыми.
Òе м а 8. Образование поверхностей, их классификация...  101
101
КЛАССИФИКАЦИЯ КРИВЫХ ПОВЕРХНОСТЕЙ
|
|
Линейчатые |
|
|
Нелинейчатые |
||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Линейчатые |
|
Линейчатые |
|
Эллипсоид |
|||||
развертываемые |
|
неразвертываемые |
|
|
|
||||
|
|
Параболоид |
|||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Коническая |
|
Коноид |
|
Гиперболоид |
|||||
|
|
|
|
|
|
|
|
|
|
Цилиндрическая |
|
Цилиндроид |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Поверхность |
|
Гиперболический |
|
|
|
||||
с ребром возврата |
|
параболоид или косая |
|
|
|
||||
(торс) |
|
плоскость |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Однополостной |
|
|
|
||
|
|
|
|
гиперболоид |
|
|
|
||
Косой цилиндр
стремя направляющими
8.4.1.Линейчатые развертываемые поверхности
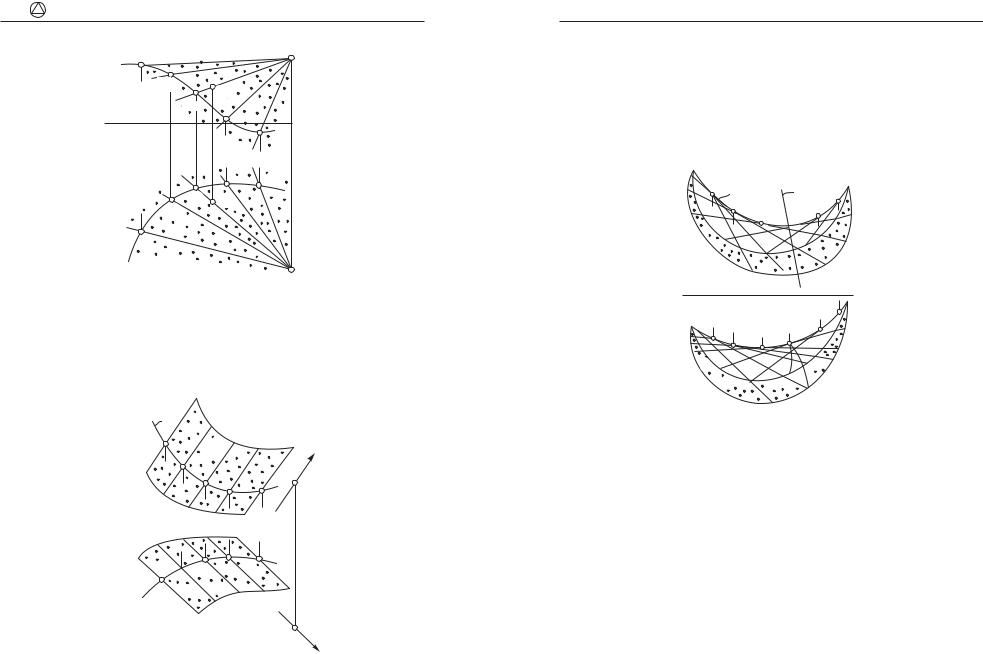
1.Конические поверхности задаются движением прямой линии l, проходящей через неподвижную точку М, по некоторой направ! ляющей кривой линии а (рис. 128). Задаем проекции неподвиж!
ной точки М (М1, М2) и две проекции пространственной кривой а (а1, а2) — направляющей линии данной поверхности. Отмечаем на ней ряд произвольных точек 1, 2, 3... Через проекции точек проводим проекции образующих. Заданная коническая поверх! ность вполне определена, так как можно построить проекции лю! бой точки, принадлежащей ей. Пусть задана фронтальная проек!
ция А2 точки А. Надо построить ее горизонтальную проекцию. Пользуясь признаком принадлежности точки поверхности, про!
водим через нее прямую М–3 (М2–32, М1–31), принадлежащую поверхности, и достраиваем горизонтальную проекцию точки А1. Частным случаем конической поверхности является круговой ко! нус. Поверхность конуса — развертываемая, так как имеются пе!
102 |
Р а з д е л 1. Ортогональные проекции |
||
|
|
|
M2 |
|
12 |
|
|
|
22 |
l2 |
A2 |
|
|
||
|
X12 |
32 |
|
|
|
|
|
|
|
|
a2 |
|
|
l |
|
|
|
1 |
a1 |
|
|
|
|
|
|
31 |
A1 |
|
21 |
|
|
|
11 |
|
|
|
|
|
M1 |
|
|
Рис. 128 |
|
ресекающиеся, бесконечно близкие образующие. Основание ко! нуса — это плоскость, ограничивающая коническую поверхность.
2. Цилиндрические поверхности задаются движением прямой, параллельной некоторому направлению, по заданной направляю! щей кривой (рис. 129). Строим проекции направляющей а (а1, а2)
a2
l2 

b2







 l1
l1 
 a1
a1 







b1
Рис. 129
Òе м а 8. Образование поверхностей, их классификация...  103
103
ипроекции фиксированной прямой b (b1, b2), которой будут па! раллельны все образующие. Цилиндрическую поверхность можно рассматривать как частный случай конической поверхности, ког! да точка М удалена в бесконечность.
3.Поверхность с ребром возврата (торс) образуется движением прямолинейной образующей l по некоторой кривой а так, что она остается касательной в каждой точке кривой (рис. 130).
a2 |
απ2 |
K2 
 l2
l2 

X12
 a1
a1
K1 |
 l1
l1 












 b1
b1
Рис. 130
Кривая а называется ребром возврата. Касательные l образуют две полости поверхности, а направляющая является линией их пересечения. Если поверхность торса пересечь плоскостью α, перпендикулярной образуюшей l и проходящей через точку ее ка! сания, то получим кривую b, точка К называется точкой возврата кривой b. Две соседние образующие пересекаются. Поверхность развертываемая. Достоинством линейчатых поверхностей являет! ся возможность их обработки плоским инструментом.
104  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
8.4.2. Линейчатые неразвертываемые поверхности
Поверхности являются неразвертываемыми потому, что повер! хность невозможно совместить с плоскостью без складок и разры! вов. Две соседние образующие — это скрещивающиеся прямые.
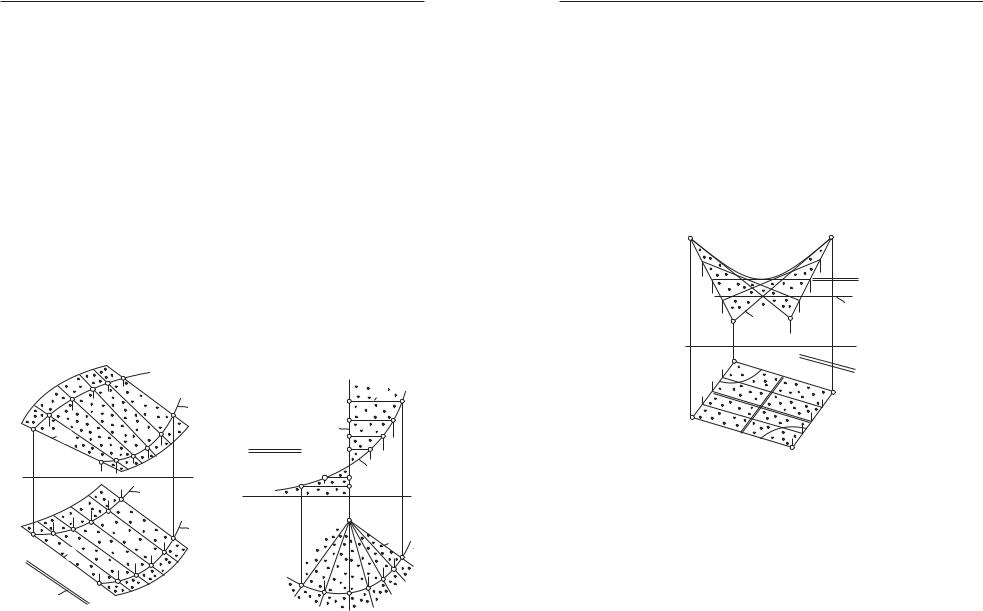
Цилиндроид образован движением прямой, параллельной за! данной плоскости параллелизма α, по двум пространственным кривым a и b (рис. 131). Плоскость параллелизма α (απ1) гори! зонтальной плоскости проекций. Горизонтальные проекции об! разующих параллельны следу απ1. Фронтальные проекции обра! зующих строятся по двум точкам 1 и 2. Направляющими цилиндроида могут быть две окружности. Такие поверхности на! ходят широкое применение при постройке вытяжных труб (схема образования цилиндроида V, V, , т. е. две кривые и плоскость параллелизма).
Коноид образован движением прямой по одной прямолиней! ной направляющей n, по другой криволинейной направляющей m, оставаясь параллельной некоторой плоскости параллелизма α || π1 (рис. 132). Фронтальные проекции образующих параллельны сле! ду απ2. Горизонтальные проекции строятся по точкам (схема об!
|
|
a2 |
|
|
|
|
|
l2 |
12 |
|
|
|
22 |
|
|
|
|
b2 |
|
1 |
|
l |
n2 |
|
|
2 |
2 |
απ2 |
|
|
|
|
||
|
X |
22 |
m2 |
|
|
12 |
|
|
|
|
|
a1 |
X12 |
|
|
|
|
n1 ≡21 |
|
|
|
|
b1 |
|
|
11 |
l1 |
l1 |
11 |
|
|
m |
||
|
|
|
|
|
|
|
|
1 |
|
|
απ1 |
21 |
|
|
|
|
Рис. 131 |
Рис. 132 |
|
Т е м а 8. Образование поверхностей, их классификация...  105
105
разования коноида — |, V, , т. е. направляющие прямая, кривая и плоскость параллелизма).
Гиперболический параболоид, или косая плоскость, задается дву! мя скрещивающимися прямыми направляющими АВ, CD и плос! костью параллелизма α(απ1). Огибающая фронтальной проекции гиперболического параболоида является параболой. Если пере! сечь эту поверхность плоскостью β || π1, получим две прямые. Если провести произвольную горизонтальную плоскость γ, в се! чении получится гипербола (рис. 133). Отсюда и название гипер! болический параболоид (схема образования гиперболического параболоида — |, |, , т. е. направляющие прямые и плоскость па! раллелизма).
A2 |
|
|
D2 |
|
|
|
βπ2 |
|
|
|
γπ2 |
B2 |
|
l2 |
C2 |
|
|
||
X12 |
|
|
|
|
B1 |
|
απ |
|
|
|
|
|
|
|
1 |
|
|
|
l1 |
|
|
|
D1 |
A1 |
|
|
|
|
|
|
C1 |
|
|
Рис. 133 |
|
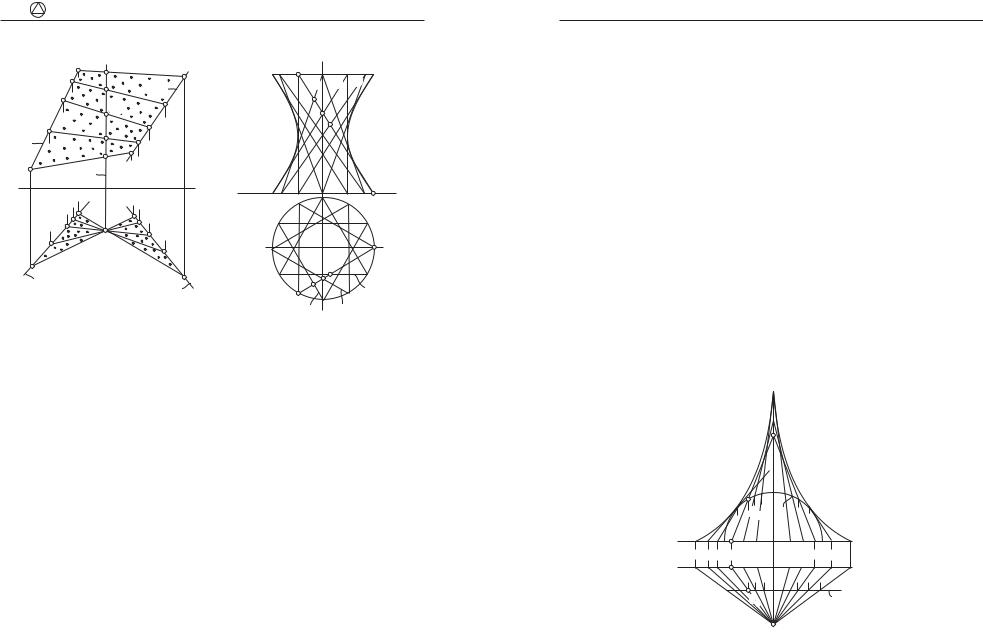
Однополостный гиперболоид образуется движением прямоли! нейной образующей l по трем прямолинейным скрещивающимся направляющим а, b, c.
Образующая l пересекает все три направляющие (рис.134). Схема образования — |, |, |, т. е. три направляющие прямые. Если направляющие и образующие подобрать так, чтобы концы обра! зующих перемещались по окружностям или эллипсам и пересека! ли три направляющие, то получим поверхность, очерком которой
106 |
Р а з д е л 1. Ортогональные проекции |
|
|
|
|
|
||
|
|
|
|
A2 |
|
|
|
|
|
|
|
c2 |
|
a |
2 |
b |
с2 |
|
|
|
|
|
|
2 |
||
|
|
32 |
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
a2 |
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X12 |
b2 |
|
X12 |
|
|
|
|
B2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
11 |
b1 |
≡31 |
21 |
|
|
|
|
B1 |
a1 |
|
|
c1 |
|
|
|
|
c1 |
|
|
|
A1 |
|
|
|
||
|
|
|
|
a1 |
|
b |
||
|
|
|
|
|
|
|
|
1 |
|
Рис. 134 |
|
|
Рис. 135 |
||||
является одна ветвь гиперболы, поэтому поверхность называется однополостным гиперболоидом. Причем здесь можно рассматри! вать два семейства образующих (рис. 135).
Возможность создать кривые поверхности при помощи пря! мых использовал русский инженер Владимир Григорьевич Шухов (1853–1936), выпускник технического училища (высш. уч. завед), с 1917 г. Московское Высшее техническое училище им. Н.Э. Бау! мана. Рассмотренная поверхность (рис. 135) носит название «баш! ня Шухова». Инженер был одарен математически настолько, что сам П. Чебышев — знаменитый математик — предлагал ему совме! стную работу в области математики и аналитической механики.
Шухов создал изобретения в разных областях — в нефтяной, строительной, машиностроительной. Им было получено 15 па! тентов, выпущено 20 научных трудов и созданы десятки конст! рукций: нефтепроводы, нефтехранилища, нефтеналивные баржи, форсунки, паровые котлы, насосы, перекрытия, башни, мосты, водопроводы, мины, артиллерийские лафеты, доки, элеваторы (3240 резервуаров, 65 барж, 21 элеватор для зерна, 8 доменных пе! чей, 417 мостов). Стройконтору, в которой работал Шухов, называ!
Т е м а 8. Образование поверхностей, их классификация...  107
107
ли конторой по эксплуатации технических идей и изобретений ин! женера Шухова. На Нижнегородской ярмарке для выставки было разработано 25!метровое кольцо круглого павильона и 28!метровая решетчатая водонапорная башня, на Шаболовке в Москве — 150! метровая радиомачта. Им была решена головоломная задача — спрямление минарета Медресе Улугбека в Самарканде, наклонив! шегося более чем на 5°. Шухов предложил произвести спрямле! ние разворотом вокруг центра тяжести. Для этого основание ми! нарета установили на подвижный балансир с металлической поверхностью, очерченной радиусом из центра тяжести. Не было ни подъема, ни опускания центра тяжести. Все выполнили за 3 дня без подготовительных работ. Им же в 1891 г. был разработан крекинг нефти. До сих пор несут службу строительные сооруже! ния Шухова в Москве: ажурные перекрытия ГУМа, залов музея изобразительных искусств им. А.С. Пушкина, главного почтамта, Киевского вокзала, цехов ЗИЛа и «Динамо».
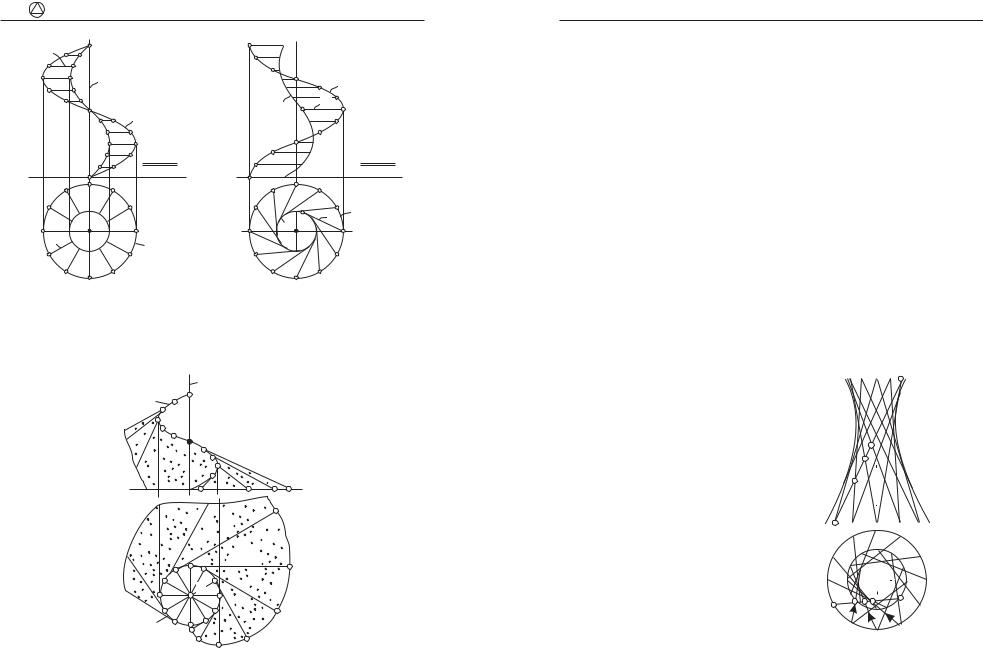
Косой цилиндр с тремя направляющими образуется движением прямолинейной образующей по трем направляющим, одна из ко! торых обязательно кривая. Схемы образования: V, |, |; V, V, |; V, V, V. Рассмотрим пример, когда заданы направляющие прямые m и n, окружность f (рис. 136). Образующая 1–2 (прямая) пересекает все
 m2
m2
32
22 f2
n2 |
|
n1 |
12 |
11 |
21 |
f1 |
m1 ≡31 |
Рис. 136
108  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
три направляющие. Строится сначала горизонтальная проекция, затем фронтальная проекция по двум точкам.
На рис. 137 представлен косой цилиндр с двумя криволиней! ными направляющими (две окружности m и n) и одной прямоли! нейной (ось i).
 n2
n2
m2 
Т е м а 8. Образование поверхностей, их классификация...  109
109
 z3
z3
m2
l2 |
l3 |

 z2
z2
 m3
m3
|
|
l1 |
m1 |
i2 |
|
z1 |
|
n1 |
11 |
|
|
|
|
m1 |
21 |
i1 
 31
31
Рис. 137
Косой цилиндр с тремя криволинейными направляющими можно представить образованным тремя эллипсами, по которым скользит прямолинейная образующая. Нужно заметить, что лю! бую из рассмотренных поверхностей можно задать движением других (часто криволинейных) образующих.
Рис. 138
l2 n2 |
m2 |
n3 |
|
l3 |
|
|
|
m3 |
l1
m1
 n1
n1
Рис. 139
8.4.3. Нелинейчатые неразвертываемые поверхности
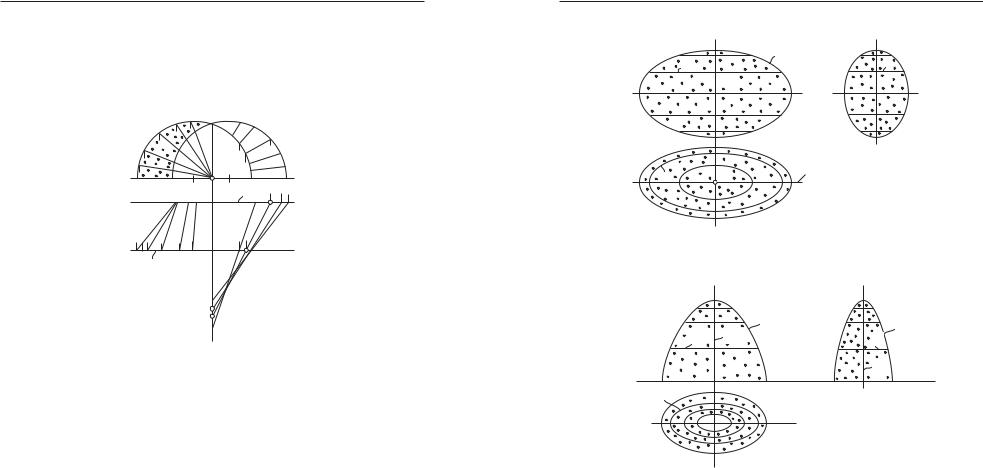
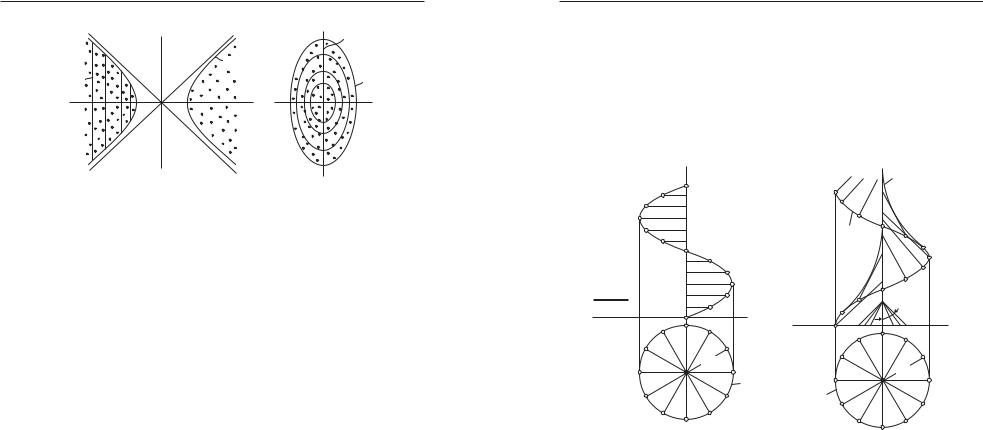
Эллипсоид трехосный образован движением переменного эл! липса вдоль одной из трех его осей Х, Y, Z (рис. 138). Образующие эллипсы подобны. Эта поверхность является закономерной.
Эллиптический параболоид образуется движением деформирую! щегося эллипса по двум направляющим параболам m и n (рис. 139). Фронтальная и профильная проекции — параболы разных разме! ров. Все горизонтальные проекции — подобные эллипсы.
Двуполостный гиперболоид образуется движением изменяюще! гося эллипса по направляющей гиперболе вдоль действительной оси (рис. 140). Фронтальная и горизонтальная проекции — гипер! болы разных размеров. Профильная — подобные эллипсы. В се! чении можно получить все кривые второго порядка: эллипс, ги! перболу и параболу.
110  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
|
m3 |
|
m2 |
l2 |
l3 |
|
Рис. 140
8.5. Кривые поверхности частного вида
Винтовые поверхности |
|
|
Поверхности вращения |
|
|||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Прямой геликоид |
|
Линейчатые |
|
Нелинейчатые |
|||||
(винтовой коноид) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Косой геликоид |
|
Конус вращения |
|
Тор |
|||||
|
|
|
|
|
|
|
|
|
|
Кольцевой геликоид |
|
Цилиндр вращения |
|
Эллипсоид вращения |
|||||
(кольцевой коноид) |
|
|
|
|
|
|
|
|
|
|
Однополостной |
|
Параболоид вращения |
||||||
|
|
|
|
||||||
Винтовой кольцевой |
|
|
|||||||
|
гиперболоид |
|
|||||||
|
|
|
|
|
|||||
цилиндроид |
|
вращения |
|
|
|
|
|||
|
|
Гиперболоид |
|||||||
|
|
|
|
|
|
|
|||
Развертывающийся |
|
|
|
|
|
||||
|
|
|
|
|
вращения |
||||
геликоид |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
(винтовой торс) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.5.1.Винтовые поверхности
Квинтовым поверхностям относятся такие, у которых вместо произвольной криволинейной направляющей взята винтовая линия.
Прямой геликоид, или винтовой коноид, образуется движением прямолинейной образующей l по винтовой линии а образующего цилиндра и его оси i. Плоскостью параллелизма является гори! зонтальная плоскость. Все образующие пересекают ось и винто!
Т е м а 8. Образование поверхностей, их классификация...  111
111
вую линию. Сначала строятся горизонтальные проекции образу! ющих, затем — фронтальные по точкам (рис. 141). Поверхность применяется при сооружении винтовых лестниц.
Косой геликоид. Если образующие геликоида l пересекают пря! молинейную направляющую i (ось) под одним углом α к оси i, то они все время остаются параллельными образующим кругового конуса, который называют направляющим конусом, или конусом параллелизма (рис. 142).
 i2
i2
 a2
a2
απ2
X12
i1 |
a1 |
Рис. 141
i2
a2
α°
X12
i1 |
a1 |
Рис. 142
Кольцевой геликоид (кольцевой коноид). Если прямой геликоид пересечь соосным цилиндром меньшего диаметра и рассматри! вать винтовую линию на нем, то получим поверхность, называе! мую кольцевым геликоидом, или кольцевым коноидом (рис. 143).
Винтовой кольцевой цилиндроид (рис. 144). Если образующие будут скрещивающимися прямыми с осью (касательными к внут! реннему цилиндру), то полученный прямой кольцевой геликоид называется винтовым кольцевым цилиндроидом. Винтовые повер! хности находят применение при изготовлении изделий с резьбой.
112 |
Ð à ç ä å ë |
1. Ортогональные проекции |
|
|
|
|
l2 |
|
|
|
|
|
i2 |
|
|
|
a2 |
|
|
b2 |
|
l2 |
12 |
|
|
a2 |
|
22 |
|
|
|
|
|
||
|
|
απ2 |
|
|
απ2 |
X12 |
|
X12 |
|
|
|
|
i1 |
|
b1 |
l1 |
a1 |
|
|
|
|||
|
|
21 |
|
||
|
l1 |
a1 |
|
|
11 |
|
|
|
|
|
|
|
Рис. 143 |
|
Рис. 144 |
|
|
Развертывающийся геликоид, или винтовой торс (рис. 145). На! правляющей кривой является винтовая линия, а образующие пря! мые касаются кривой во всех своих положениях. Кривая называ!
i2 |
a2 |
l |
2 |
l1 |
i1 |
a1 |
Рис. 145 |
Т е м а 8. Образование поверхностей, их классификация...  113
113
ется ребром возврата. На плоскости, перпендикулярной оси вин! товой линии, образующая описывает эвольвенту. Поверхность еще называется эвольвентный геликоид. Он находит применение при проектировании откосов наклонных шоссейных и железных дорог с поворотом.
При изучении кривых поверхностей рекомендуется познако! миться с изложением этого материала по учебникам, предназначен! ным для студентов технических и строительных специальностей. В них приведены фотографии и рисунки механизмов и архитектур! ных сооружений.
8.5.2.Поверхности вращения
Клинейчатым поверхностям вращения относятся поверхности, образованные вращательным движением прямолинейной образу! ющей вокруг оси. Коническая поверхность вращения возникает, когда образующая прямая пересекается с осью, а направляющей является окружность. Цилиндрическая поверхность вращения имеет перемещающуюся по окружности образующую, параллель! ную оси вращения.
Однополостной гиперболоид |
|
|
|
|
|
|
|
B2 |
|
||
вращения имеет образующую, |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
скрещивающуюся с осью. Каждая |
|
|
|
|
|
|
|
|
|
|
|
точка образующей перемещается |
|
|
|
|
|
|
|
|
|
|
|
по окружности. Если провести ка! |
|
|
|
|
|
|
|
|
|
|
|
сательно ко всем образующим ли! |
|
|
|
|
|
|
|
|
|
|
|
нию, то очерком фронтальной |
|
|
|
|
|
|
|
|
|
|
|
проекции будет гипербола. В лю! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
бой точке поверхности можно |
|
|
|
|
|
|
|
|
|
|
|
провести две образующие, т. е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
имеются два семейства образую! |
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
||||
щих для создания одной поверх! |
|
|
|
|
|
||||||
ности (рис. 146). |
|
|
|
|
|
|
|
|
|
|
|
К нелинейчатым поверхностям |
|
|
|
|
|
|
|
|
|
|
|
вращения относятся: сжатый эл |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
липсоид вращения, его можно полу! |
A1 |
|
|
|
B1 |
|
|||||
|
|
||||||||||
чить, если вращать образующий |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
эллипс вокруг малой оси; вытяну |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тый — если вращать эллипс во! |
|
|
Рис. 146 |
|
|||||||

114  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
круг большой оси (рис. 147, 148); параболоид вращения образуется вращением параболы вокруг ее оси. Если поместить источник света в фокус параболы, то отраженные лучи света от внутренней поверхности параболоида будут направлены параллельно. Это
i2 |
i3 |








 i1
i1 






Рис. 147
i2 |
i3 |
i1
Рис. 148
свойство нашло применение при создании прожекторов и фар (рис. 149); двуполостной гиперболоид вращения образуется враще! нием гиперболы вокруг действительной оси (рис. 150).
Т е м а 8. Образование поверхностей, их классификация...  115
115
i2 |
i3 |
|
F2 |
Рис. 149
i2 








































 i3
i3 

Рис. 150
8.5.3. Торовые поверхности
Торовые поверхности образуются вращением окружности во! круг оси. В зависимости от расположения оси вращения i относи! тельно окружности а могут получаться торы нескольких видов: к торам первого вида относятся те, у которых ось вращения и об! разующая окружность лежат в одной плоскости: тор, кольцо, если ось i не пересекает окружность а (рис. 151, а); тор сомкнувшийся, если ось касается окружности (рис. 151, б); тор дважды сомкнув шийся, если ось пересекает окружность (рис. 151, в); шар, если ось вращения совпадает с диаметром окружности (рис. 151, г). Поверхность тора первого вида интересна тем, что на ней можно видеть три семейства окружностей: 1) окружности получаются
116  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
i2 |
|
i2 |
a2 
a2
а |
б |
i2 |
i2 |
|
a2 |
a2 |
|
в |
г |
|
Рис. 151 |
при пересечении тора плоскостями, перпендикулярными оси вращения (рис. 154, απ2); 2) окружности лежат в плоскостях, про! ходящих через ось вращения (рис. 154, βπ1); 3) окружности лежат в плоскостях, касательных к образующим окружностям а (рис. 154, γπ2). В плоскостях σ, τ, δ лежат кривые Персея: овалы Касси! ни, Бернулли и лемнискаты Гоутта.
Тор второго вида образуется, если плоскость окружности а не лежит в одной плоскости с осью вращения i.
8.6. Изображение геометрических тел
Рассмотрим изображение геометрических тел группами по признаку их образования. Пирамида и конус могут быть прямыми (рис. 152, а, в) и наклонными (рис. 152, б, г).
В основании пирамиды могут лежать не только правильные многогранники. Если в основании конуса лежит окружность, а ось не перпендикулярна основанию, то такой конус называется эллиптическим, так как в нормальном сечении, перпендикуляр! ном оси, лежит эллипс (рис. 152, г).
Построение проекции пирамиды и конуса начинают с той плоскости проекций, на которую основание проецируется без ис!
Т е м а 8. Образование поверхностей, их классификация... |
117 |
|||||||||||
|
|
|
S2 |
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
|
|
|
(N2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X12 A2 |
12 |
B2 C2 |
D2 |
A2 |
D2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
C |
2 |
|
|
|
|
A1 |
|
|
D1 |
2 |
D1 |
|
|
|
|
|
||
|
M |
21 |
N |
1 |
|
|
S1 |
|
||||
|
|
11 |
1 |
|
|
|
|
|
|
|
||
|
|
S1 |
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
B1 |
C1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
|
|
||||
|
|
|
а |
|
|
б |
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
(M2) |
|
|
|
|
|
|
|
|
|
X12 A2 |
12 |
|
B2 |
|
A2 |
|
|
|
N2 |
B2 |
|
|
|
|
|
|
|
|
|
||||||
|
1 |
1 |
|
|
|
D1 |
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
M1 |
S1 |
|
|
A1 |
|
|
|
|
B1 |
|
|
|
|
|
|
|
|
|
|
|
|||
A1 |
|
|
|
B1 |
|
|
|
|
|
N1 |
|
|
|
|
|
|
|
S1 |
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
|
|
в |
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 152 |
|
|
|
|
|
|
|
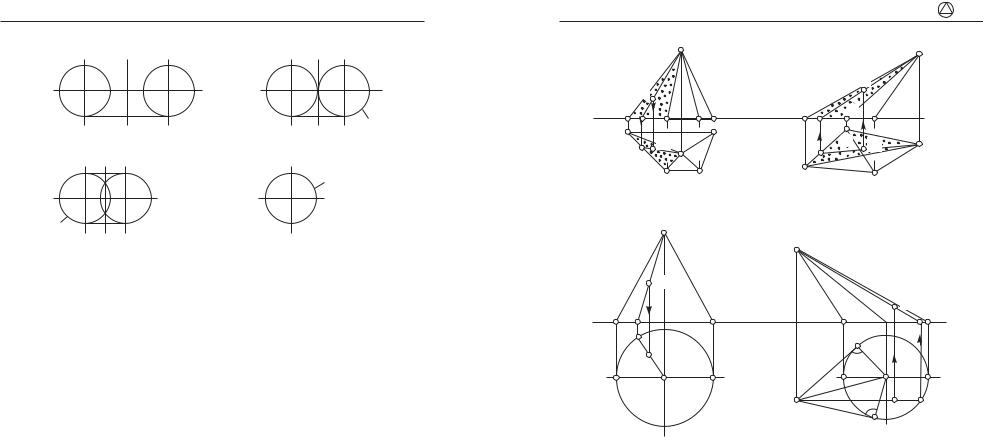
кажения. Затем строятся проекции вершины S. Проекции боко! вых ребер и образующих строятся по проекциям двух точек. На чертеже можно построить проекции любой точки, лежащей на поверхности тела. Пусть задана фронтальная проекция точки М (если М в скобках, значит, лежит на невидимой части тела). Изве! стен признак принадлежности точки плоскости. Аналогично оп! ределяется недостающая проекция точки М. Она должна лежать на какой!нибудь линии тела. В данном случае на прямой SM. Она пересекает основание в точке 1. Строится горизонтальная проек! ция S111 и М1. Точка N задана своей горизонтальной проекцией N1.
118  Р а з д е л 1. Ортогональные проекции
Р а з д е л 1. Ортогональные проекции
Строим горизонтальную проекцию прямой S1N121. Определяем фронтальную проекцию точки 22 на основании, строим фронталь! ную проекцию S222 и N2. Определяем видимость точки N2. На пи! рамиде N2 невидима, так как грань А2D2S2 на виде спереди невиди! мая. На конусе образующие S2A2 и S2B2 являются границами видимости для вида спереди. Для наклонного конуса границами видимости на виде сверху служат образующие S1C1 и S1D1, каса! тельные к основанию конуса.
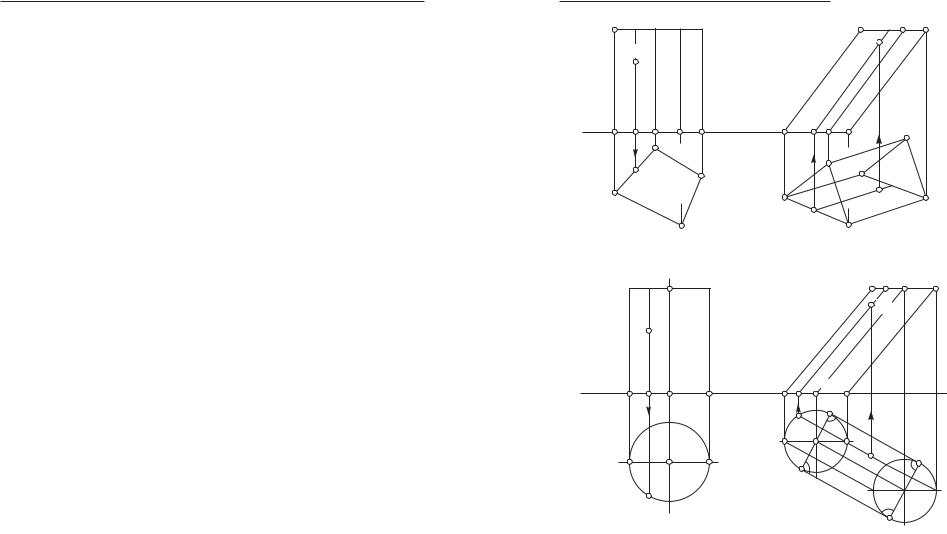
Рассмотрим группу тел, у которых боковые ребра и образую! щие параллельны между собой. Призма и цилиндр могут быть прямыми и наклонными (рис. 153). Сначала задаются основания, расположенные на плоскости проекций, затем задается одна точ! ка другого основания. Круговой цилиндр может быть прямым и наклонным, если ось цилиндра наклонена к основанию. Если ос! нования призмы и цилиндра параллельны, то длина проекций ре! бер и образующих одинакова. Задаем точку верхнего основания А′
иО′. Проводим проекции ребер призмы параллельно направле! нию ребра АА′ и откладываем длину АА′ (рис. 153, б). Для изобра!
жения цилиндра достаточно задать проекции центров оснований (рис. 153, г). Видимость спереди определяется образующими А2А2′
иВ2В2′, сверху — С1С1′и D1D1′, касательными к окружностям осно! ваний. Точки А1 и В1 лежат на горизонтальном диаметре основа! ния, а точки С1 и D1 — на диаметре, перпендикулярном к очерку цилиндра на виде сверху. Проекции точек М и N на призме и ци! линдре строятся аналогично точкам на пирамиде и конусе.
Рассмотрим чертежи шара и кольцевого тора (рис. 154). Шар задается тремя окружностями одинакового диаметра (рис. 154, а).
Окружность m на виде спереди имеет изображения на плоскостях π1 и π3 в виде прямых m1 и m3, параллельных осям фронтальной плоскости проекций. Аналогично изображаются окружности n
(n1, n2, n3) и l (l3, l2, l1). Точка М задана фронтальной проекцией (М2) — невидимая. На поверхности шара прямые не существуют. Точка М может принадлежать горизонтальной окружности а (а2 и а3 — прямые). АВ — диаметр окружности а. На виде сверху прово! дим окружность радиусом 1/2 АВ. Фронтальная проекция М2 не! видима, так как точка М лежит на дальней половине шара. Точка N принадлежит очерковой окружности l шара. Проекции точки К на торе находятся аналогично (рис. 154, б).
Т е м а 8. Образование поверхностей, их классификация...  119
119
A2′ |
|
|
|
|
|
(M2) |
|
|
|
X12 |
D2 |
|
C2 |
|
A2 |
12 |
B2 |
A2 |
22 |
|
D1 |
|
|
|
|
11 ≡M1 |
|
C1 |
|
A1 ≡A1′ |
|
|
A1 |
21 |
|
|
B1 |
|
|
|
|
|
|
A2′ |
C2′ |
B2′ |
|
|
N2 |
C2 |
B2 |
C1′ |
C1 |
A1′ |
|
|
|
|
|
N1 |
B1′ |
|
B1 |
|
а |
б |
|
O2′ |
|
|
|
|
A2′ |
O2′ |
B2′ |
|
|
|
|
|
|
(N2) |
|
|
M2 |
|
|
|
|
|
|
|
|
12 |
O2 |
|
A2 |
|
O2 |
|
|
|
A |
|
B |
2 |
22 |
D1 |
B2 |
|
|
2 |
|
|
|
|
|
|
||
|
|
|
A1 |
21 |
|
|
|
|
O1 ≡O1′ |
|
|
|
B1 |
|
|
||
|
|
|
O1 |
N1 |
|
D1′ |
||
A1 |
|
B1 |
C1 |
|
|
|
|
|
 A1′
A1′  O1′
O1′  B1′
B1′
11 ≡M1
в |
г |
C1′ |
Рис. 153
CD — диаметр окружности, на которой лежит точка К. К2 — ви! димая проекция, значит, точка К лежит на передней части тора. Профильную проекцию точки находят по третьему закону проек!