

Методы преобразования комплексного чертежа
.pdfАлгоритм решения задачи на преобразование прямой уровня в проецирующую
1) Проводим новую ось координат х45, перпендикулярную n4
х45 n4 (х45 = π4 ∩ π5).
2)Из проекций А4 и В4 проводим линии связи, перпендикулярные оси х45 ( в данном случае эти линии связи совпадают).
3)По линиям связи откладываем отрезки │А45 А5│=│А14 А1│ и
│В45 В5│=│В14 В1│.
Так как все эти отрезки равны между собой, проекции А5 и В5 совпадут, т. е. прямая n проецируется на π5 в виде точки. Таким образом, прямая n в системе плоскостей проекций π4/π5стала проецирующей.
Задача 3. Плоскость общего положения α (∆АВС) преобразовать в
проецирующую плоскость (рисунок 8).
Плоскость общего положения α зададим треугольником АВС. Чтобы плоскость α преобразовать в проецирующую, необходимо новую плоскость проекций расположить перпендикулярно данной плоскости. Для этого в данной
плоскости следует провести линию уровня (горизонталь или фронталь) и эту линию уровня поставить в проецирующее положение, т. е. решить основную задачу 2.
π1/π2 → π1/π4 π4 π1
π4 h
x14 h1
Рисунок 8
Алгоритм решения задачи на преобразование плоскости общего положения в проецирующую
1)В плоскости α(∆АВС) проводим линию уровня – горизонталь h (h1; h2) (h2║x12).
2)Проводим новую ось координат х14 h1 (х14=π1∩π4).
11

3)Из горизонтальных проекций А1, В1 и С1 проводим линии связи, перпендикулярные оси х14.
4)На продолжениях этих линий связи от оси х14 откладываем отрезки, равные zА; zВ; zС
│А14 А4│=│А12 А2│ = zА │В14 В4│=│В12 В2│ = zВ
│С14 С4│=│С12 С2│ = zС= 0
На плоскости π4 проекции точек А4, В4 и С4 располагаются на одной прямой, т. е. мы получили вырожденную проекцию плоскости α – α4.
Задача 4. Плоскость общего положения α (∆АВС) преобразовать в
плоскость уровня (рисунок 9).
Чтобы перевести плоскость из общего положения в уровня, необходимо последовательно выполнить два преобразования. Сначала преобразовать плоскость общего положения в проецирующую, а затем, проецирующую плоскость - в плоскость уровня.
Преобразование плоскости общего положения в проецирующую
подробно рассмотрено выше (см. задача 3, рисунок 8).
Второй этап решения задачи заключается в переходе от системы плоскостей π1/π4 к новой системе π4/π5. Новую плоскость π5 следует расположить параллельно заданной плоскости α (π5║α). Тогда на π5 треугольник АВС спроецируется в натуральную величину.
1)
π1/π2 → π1/π4 π4 π1
π4 h
x14 h1
2)
π1/π4 → π4/π5
π5 π4 π5 ║ α
x45 ║ α4
Рисунок 9
12

Алгоритм решения задачи на преобразование проецирующей плоскости в плоскость уровня
1) Проводим новую ось координат х45, параллельную вырожденной проекции плоскости α – α4.
х45║α4; (х45 = π4 ∩ π5; π5 π4).
2) Из проекций А4, В4, С4 проводим линии связи, перпендикулярные оси
х45.
3)На продолжениях этих линий связи от оси х45 откладываем отрезки:
│А45 А5│=│А14 А1│ │В45 В5│=│В14 В1│
│С45 С5│=│С14 С1│
Соединив проекции А5, В5, С5, получаем проекцию ∆АВС на π5.
3.3 Метод плоскопараллельного перемещения
Сущность метода плоскопараллельного перемещения состоит в том, что
положение плоскостей проекций остается неизменным, а геометрический образ перемещается в пространстве из общего положения в частное.
Движение, которое при этом совершает геометрический образ, является
плоскопараллельным.
Плоскопараллельным называется движение, при котором все точки фигуры перемещаются в параллельных плоскостях.
Мы будем рассматривать плоскопараллельное перемещение фигуры относительно одной из плоскостей проекций. В этом случае точки фигуры будут перемещаться в плоскостях, параллельных данной плоскости проекций.
Для плоскопараллельного перемещения справедливо следующее утверждение.
При плоскопараллельном перемещении геометрической фигуры относительно какой-либо плоскости проекций, проекция фигуры на эту плоскость хотя и меняет свое положение, но остается равной проекции фигуры в ее исходном положении (рисунок 10).
Рисунок 10
13

Рассмотрим плоскопараллельное движение точки А относительно плоскости π1 (рисунок 11). В этом случае траектория движения точки – кривая m лежит в плоскости α (α – горизонтальная плоскость уровня). На π1 кривая m проецируется без искажения. На π2 плоскость α, а следовательно и кривая m, проецируется в виде прямой, параллельной оси х12.
Таким образом, при плоскопараллельном перемещении фигуры относительно горизонтальной плоскости проекций, проекция фигуры на π1 меняет свое положение, но остается при этом равной проекции фигуры в исходном положении. Фронтальные проекции точек фигуры перемещаются по прямым, параллельным оси х12.
Рисунок 11
В случае плоскопараллельного перемещения фигуры относительно фронтальной плоскости проекций, проекция фигуры на π2 меняет свое положение, но остается равной проекции фигуры в исходном положении. Горизонтальные проекции точек фигуры перемещаются по прямым, параллельным оси х12.
Решение четырех основных задач способом плоскопараллельного перемещения
Задачи 1 и 2. Прямую общего положения n (n1, n2) преобразовать в проецирующую прямую (рисунок 12).
Чтобы прямую общего положения сделать проецирующей, необходимо выполнить последовательно два преобразования.
Преобразование 1. Прямую общего положения перевести в прямую уровня.
Одна из проекций прямой уровня должна быть параллельна оси х12. Если прямая n параллельна π2, то ее горизонтальная проекция n1 параллельна оси х12. Перемещение прямой n в новое положение будем осуществлять относительно плоскости π1. В этом случае горизонтальная проекция фигуры перемещается в плоскости π1, не меняя формы и размеров. Фронтальные проекции точек прямой будут перемещаться по прямым, параллельным оси х12.
14

Рисунок 12
Алгоритм решения задачи на преобразование прямой общего положения в прямую уровня (рисунок 12, а)
1)Возьмем на прямой n произвольно две точки А (А1; А2) и В (В1; В2).
2)Через произвольную точку А1 проведем прямую n1, параллельную оси х12 ( n1 ║ х12 ).
3)На прямой n1 отложим отрезок [ А1 В1 ], равный [А1 В1].
4)Из точек А1 и В1 проведем линии связи, перпендикулярные оси х12
инайдем точки пересечения этих линий связи с вырожденными проекциями плоскостей φА и φВ, т. е. с прямыми, проходящими через
А2 и В2 параллельно х12.
Полученные точки А2 и В2 будут концами фронтальной проекции отрезка [ А В ], параллельного π2.
Преобразование 2. Прямую уровня преобразовать в проецирующую прямую.
Проецирующая прямая на одну плоскость проекций проецируется без искажения, и проекция прямой на этой плоскости располагается перпендикулярно оси х12. Следовательно, перемещение прямой n в новое положение будем осуществлять относительно плоскости π2. В этом случае фронтальная проекция [ А2 В2 ], перемещается в плоскости π2, не меняя формы и размеров, а горизонтальные проекции точек А1 и В1 будут перемещаться по прямым, параллельным оси х12, т. е. по вырожденной проекции плоскости γА, В.
15

Алгоритм решения задачи на преобразование прямой уровня в проецирующую прямую (рисунок 12, б)
1)Через произвольную точку А2 проведем прямую n2, перпендикулярную оси х12 ( n2 х12 ).
2)На прямой n2 отложим отрезок [ А2 В2 ], равный [ А2 В2 ].
3)Из проекций А2 и В2 проведем линию связи, перпендикулярную оси х12 и найдем точку пересечения этой линий связи с прямой, проходящей
через А1 и В1 параллельно х12.
Задачи 3 и 4. Плоскость общего положения преобразовать в плоскость уровня (рисунок 13).
Чтобы преобразовать плоскость из общего положения в уровня, необходимо последовательно выполнить два преобразования. Сначала преобразовать плоскость общего положения в проецирующую, а затем, проецирующую плоскость - в плоскость уровня.
Преобразование 1. Плоскость общего положения α (∆АВС) преобразовать в проецирующую плоскость (рисунок 13, а).
Произведем плоскопараллельное перемещение ∆АВС относительно плоскости π1. В этом случае проекция фигуры на π1 поменяет свое положение, но останется равной проекции треугольника в исходном положении. Фронтальные проекции вершин треугольника будут перемещаться по прямым, параллельным оси х12 (по вырожденным проекциям плоскостей γА, γВ, γС.
Алгоритм решения задачи на преобразование плоскости общего положения в проецирующую (рисунок 13, а)
1)В плоскости α(∆АВС) проведем линию уровня – горизонталь h (h1; h2) (h2║x12).
2)Через произвольную точку А1 проведем прямую h1,
перпендикулярную оси х12.
3)На прямой h1 отложим отрезок [ А1 11 ], равный [ А1 11 ].
4)Построим точки В1 и С1, используя равенство отрезков
[ А1 В1 ] = [ А1 В1 ] и [ 11 В1 ] = [ 11 В1 ] [ А1 С1 ] = [ А1 С1 ] и [ 11 С1 ] = [ 11 С1 ]
Соединив точки А1, В1 и С1, получим новую горизонтальную проекцию ∆АВС.
5) Из проекций А1, В1 и С1 проведем линии связи, перпендикулярные оси х12 и найдем точки пересечения этих линий связи с прямыми, проходящими через А2, В2 и С2 параллельными х12.
Соединив точки А2, В2 и С2, получим новую фронтальную проекцию ∆АВС.
16
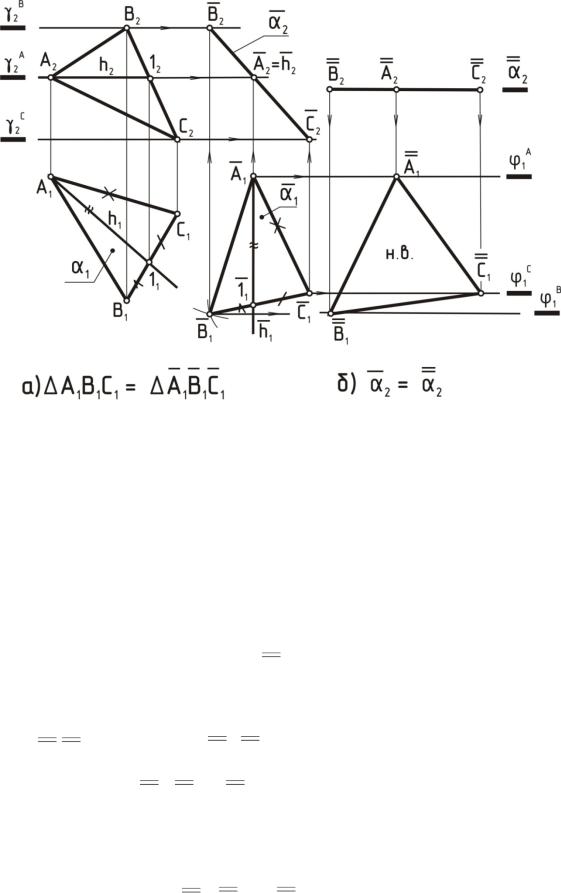
Рисунок 13
Преобразование 2. Проецирующую плоскость α(∆ А В С) преобразовать в плоскость уровня (рисунок 13, б).
Плоскость уровня на одну плоскость проекций проецируется в натуральную величину, а на другую в виде прямой, параллельной оси х12.
Алгоритм решения задачи на преобразование проецирующей плоскости в плоскость уровня (рисунок 13, б)
1)Через произвольную точку А2 проведем прямую, параллельную оси
х12.
2)На этой прямой отложим отрезки
[А2 В2 ] = [ А2 В2] и [А2 С2 ] = [ А2 С2 ].
3)Из проекций А2, В2 и С2 проведем линии связи, перпендикулярные
оси х12 и найдем точки пересечения этих линий связи с вырожденными проекциями плоскостей φА, φВ, φС (прямыми, проходящими через точки А1, В1 и С1 параллельно х12).
4)Соединив точки А1, В1 и С1, получим новую горизонтальную проекцию ∆АВС.
17

3.4 Метод вращения
Рассмотрим сущность данного способа на примере вращения точки вокруг произвольной оси. Точка А, вращаясь вокруг оси i, перемещается по окружности m, плоскость ϕ которой перпендикулярна к оси вращения (ϕ i).
Дано:
i– ось вращения;
А – заданная точка (оригинал)
Построить:
окружность m, по которой перемещается точка А.
Рисунок 14
Решение:
Чтобы построить любую окружность нужно знать ее центр и радиус. Найдем центр и радиус окружности, по которой вращается точка А. Для этого:
1)Через точку А проведем плоскость ϕ
ϕi - плоскость вращения точки А.
2)Найдем точку пересечения плоскости ϕ с осью i i ∩ ϕ = О – центр вращения точки А.
3)Соединив точку О с точкой А, найдем радиус вращения точки А [ОА] = RA – радиус вращения точки А.
4)Находим натуральную величину радиуса вращения точки А. Очевидно, что все точки оригинала при его вращении вокруг оси поворачиваются на один и тот же угол. Точки, лежащие на оси вращения, остаются неподвижными.
3.4.1 Способ вращения вокруг проецирующей прямой
а) вращение точки вокруг горизонтально-проецирующей прямой
Рассмотрим наглядное изображение точки А, вращающейся вокруг оси i (i1; i2), перпендикулярной плоскости проекций π1 (рисунок 15). Плоскость ϕ, в которой перемещается точка А, перпендикулярна оси вращения (ϕ i) и следовательно, является горизонтальной плоскостью уровня (ϕ║π1). При этом окружность m, которую описывает точка А, проецируется на плоскость π1 без искажения, а на плоскость π2 эта окружность проецируется в виде отрезка, равного диаметру окружности (m2║x12).
В данном примере выполнен поворот точки А на некоторый угол α (А′ - новое положение точки А).
18

Рисунок 15 |
Рисунок 16 |
Комплексный чертеж точки А, вращающейся вокруг горизонтальнопроецирующей оси, выполнен на рисунке 16.
Алгоритм решения задачи
1)ϕА i – плоскость вращения точки А (ϕ2А i2)
2)i ∩ ϕА = ОА – центр вращения точки А (i2 ∩ ϕ2А = О2А)
3)[О А] = RА – радиус вращения точки А
4)[О1 А1] – натуральная величина радиуса вращения точки А.
Определив радиус вращения точки А, проводим на плоскости π1
окружность с центром в точке О1 и радиусом R=|О1 А1|. Повернув точку А на заданный угол α, получаем новую горизонтальную проекцию А1′. Фронтальную проекцию А2′ находим по линии связи на вырожденной проекции плоскости ϕ (ϕ2).
При вращении точки вокруг горизонтально-проецирующей оси горизонтальная проекция точки перемещается по окружности, а фронтальная – по вырожденной проекции плоскости ϕ (ϕ2) параллельно оси х12 и перпендикулярно оси вращения i (ϕА i; ϕ2 i2).
Аналогично выполняется поворот точки вокруг фронтальнопроецирующей оси .
б) вращение точки вокруг фронтально-проецирующей оси
19

Рисунок 17 |
Рисунок 18 |
При вращении точки вокруг фронтально-проецирующей оси фронтальная проекция точки перемещается по окружности, а горизонтальная –– по вырожденной проекции плоскости ϕ (ϕ1) параллельно оси х12 и перпендикулярно оси вращения i (ϕА i; ϕ1 i1).
Чтобы на заданный угол повернуть прямую или плоскость достаточно повернуть на тот же угол соответственно две точки прямой или три точки плоскости, не лежащие на одной прямой.
Основные задачи, решаемые вращением вокруг проецирующих прямых
Задача 1. Последовательным вращением вокруг осей, перпендикулярных к плоскостям проекций, прямую n (n1, n2) общего положения преобразовать в проецирующую (рисунок 19).
Чтобы прямую общего положения сделать проецирующей, необходимо выполнить последовательно два преобразования.
Преобразование 1. Отрезок АВ прямой общего положения перевести в отрезок уровня.
У прямой уровня одна из проекций должна быть параллельна оси х12. Если прямая n′ ([A′B′]) параллельна π2, то ее горизонтальная проекция n′1 ([A1′B1′]) параллельна оси х12.
Вращение прямой n ([AB]) в новое положение будем осуществлять вокруг горизонтально-проецирующей оси i. Рационально ось выбрать проходящей через один из концов отрезка. Тогда для поворота прямой достаточно повернуть только одну точку данного отрезка (точка, лежащая на оси i, при вращении останется на месте).
20