

Разные лабы / ЛР5_синхра_13
.docxФедеральное государственное автономное образовательное учреждение
высшего образования
«Национальный исследовательский университет
«Московский институт электронной техники»
Кафедра: Телекоммуникационные системы
Дисциплина: Синхронизация в высокоскоростных сетях передачи данных
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ №5
«Частотный дискриминатор Витерби»
ВАРИАНТ №13
Москва 2021
Цель работы: Исследование принципов работы схем частотных детекторов
Задание на лабораторную работу: Собрать модель схемы частотного детектора и протестировать ее работу.
Порядок выполнения работы.
Собрать в среде Matlab Simulink модель цифровой системы связи
Убедиться в корректности работы схемы в отсутствие шумов
Убедиться в работоспособности схемы, подавая на вход детектора сигналы с различным частотным рассогласованием. Использовать генератор скачкообразного сигнала Repeating Sequence Stair.
Убедиться в работоспособности схемы при наличии шума в канале.
Сделать выводы о том, в каких условиях данная схема работает наилучшим образом.
Таблица 1. Вариант задания
Вариант |
Тактовая частота, кГц |
Несущая частота, МГц |
Частотное рассогласование, кГц |
13 |
50 |
1 |
4 |
Собрать в среде Matlab Simulink модель цифровой системы связи.
Соберём в среде Matlab Simulink модель цифровой системы связи (рисунок 1.1) с параметрами, заданными по варианту.

Рисунок 1.1 – Модель цифровой системы связи с частотным детектором
Согласно варианту, необходимо в блоке Bernoulli Binary Generator задать равновероятную генерацию «0» и «1» с частотой 50 кГц (рисунок 1.2). Частотное рассогласование составляет 4000 Гц (рисунок 1.3). Схема частотного детектора представлена на рисунке 1.4.

Рисунок 1.2 – Настройки блока Bernoulli Binary Generator

Рисунок 1.3 – Настройки блока Phase/Frequency Offset

Рисунок 1.4 – Модель цифрового дискриминатора Витерби
Коэффициент усиления в частотном детекторе составляет 50 000 / 2π, что позволяет получать на выходе значение частотного смещения в соотношении 1 В – 1 Гц. На дисплее (рисунок 1.1) отображено значение смещения, а именно 4 кГц.
Убедиться в корректности работы схемы в отсутствие шумов
Убедимся в корректности построенной схемы. Для этого воспользуемся анализатором спектра и осциллограммами и рассмотрим сигнал в каждом узле схемы.
На выходе блока Bernoulli Binary Generator сигнал имеет вид, представленный на рисунке 2.1 сверху. Как и ожидалось, сигнал принимает значения «0» и «1» с равной вероятностью. После модулятора BPSK сигнал не имеет мнимой части (синяя линия на рисунке 2.1 снизу) в виду особенности BPSK модуляции, а действительная часть принимает значения «1» и «-1».
Далее, после добавления частотного рассогласования сигнал имеет искажения как в действительной, так и в мнимой части (рисунок 2.2).

Рисунок 2.1 – Осциллограммы исходного сигнала (сверху) и после модулятора (снизу)

Рисунок 2.2 – Осциллограммы до (сверху) и после (снизу) ввода частотного рассогласования
Дискриминаторы предназначены для измерения сигнала рассогласования и преобразования его в постоянное или переменное напряжение. Для случая, когда имеется постоянное частотное рассогласование (по варианту 1500 Гц), на выходе дискриминатора будет постоянное напряжение, соответствующее значению частотного рассогласования. На рисунке 2.3 отчетливо видно, что на выходе дискриминатора Витерби имеется постоянное напряжение 1500 В, что соответствует тому, что частотное рассогласование составляет 1500 Гц.

Рисунок 2.3 – Осциллограммы до (сверху) и после (снизу) дискриминатора Витерби
Рассмотрим спектрограммы в каждом узле модели. Исходный сигнал является набором бит. На спектрограмме наблюдается ожидаемый результат (рисунок 2.4).

Рисунок 2.4 – Спектрограмма исходного сигнала
После модулятора спектр сигнала не изменяется. Однако данное высказывание справедливо только для действительной части сигнала. В виду того, что в мнимой части сигнал постоянный 0, спектр мнимой части находится на очень низком уровне (-300 дБ). После добавления частотного рассогласования спектр действительной части немного подавляется (на 5 дБ), а в мнимой части увеличивается до уровня действительной части сигнала. Данное явление представлено на рисунках 2.5 и 2.6.

Рисунок 2.5 – Спектрограмма действительной части сигнала после модулятора (желтый) и после частотного рассогласования (синий)

Рисунок 2.6 – Спектрограмма мнимой части сигнала после модулятора (желтый) и после частотного рассогласования (синий)
Убедиться в работоспособности схемы, подавая на вход детектора сигналы с различным частотным рассогласованием
Для реализации требуемой задачи воспользуемся блоком Repeating Sequence Stair (рисунок 3.1). В нём зададим различные значения частотных рассогласований от 0 до 20 кГц. Частоту изменения зададим в 10 раз меньше, чем информационный сигнал (рисунок 3.2 снизу).

Рисунок 3.1 – Схема с различными частотными рассогласованиями

Рисунок 3.2 – Сигнал на выходе дискриминатора Витерби (сверху), частотное рассогласование в канале с частотой 5 кГц (снизу)
Как видно из рисунка 3.2 крайнее значение частоты, которое дискриминатор Витерби может определить, составляет 2000 Гц. При немного больших значениях видны всплески то разных знаков, при много больших значениях результатом является 0. Увеличим частоту последовательности частотного рассогласования до информационной, численно не изменив (рисунок 3.3). Как видно из рисунка дискриминатор Витерби правильно определяет значение частотного рассогласования до 2000 Гц, не имеет всплесков при малом увеличении и так же поддерживает 0 при большем увеличении. Однако информация о рассогласовании задержана на такт.

Рисунок 3.3 – Сигнал на выходе дискриминатора Витерби (сверху), частотное рассогласование в канале с частотой 50 кГц (снизу)
Увеличим частоту последовательности частотного рассогласования до 500 кГц (рисунок 3.4).
Уменьшим частоту последовательности частотного рассогласования до 500 Гц (рисунок 3.5).

Рисунок 3.4 – Сигнал на выходе дискриминатора Витерби (сверху), частотное рассогласование в канале с частотой 500 кГц (снизу)
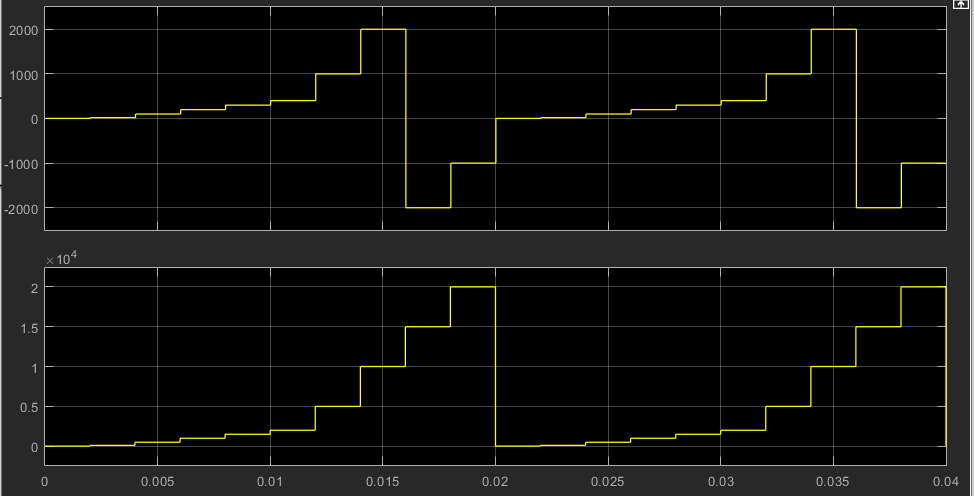
Рисунок 3.5 – Сигнал на выходе дискриминатора Витерби (сверху), частотное рассогласование в канале с частотой 500 Гц (снизу)
Рассмотрим поведение дискриминатора Витерби в случае, когда частотное рассогласование случайно (рисунок 3.6). Частоту изменения зададим в 10 раз меньше, чем информационный сигнал, то есть 5 кГц.

Рисунок 3.6 – Сигнал на выходе дискриминатора Витерби (сверху), частотное рассогласование в канале с частотой 5 кГц (снизу)
Как видно из рисунков 3.2 и 3.6 результаты дискриминатора Витерби не зависят от последовательности частотного рассогласования.
Убедиться в работоспособности схемы при наличии шума в канале.
В модель цифровой системы связи с частотным детектором (рисунок 1.1) и частотным рассогласованием 1500 Гц добавим блоки АВГН с различными отношениями сигнал-шум, а именно 10, 20, 30, 40, 50 и 60 дБ (рисунок 4.1). Результаты имитационного моделирования представлены на рисунке 4.2.

Рисунок 4.1 – Модель цифровой системы связи с частотным детектором с различными шумами

Рисунок 4.2 – Результаты моделирования (1) АВГН = 10, 20, 30, 40, 50, 60.
Из рисунка 4.2 отчетливо видно, что при отношении сигнал-шум 40 дБ и менее выходной сигнал с дискриминатора Витерби не определяет величину частотного рассогласования. При отношении в 50 дБ и выше существует погрешность. На рисунке 4.3 представлены результаты имитационного моделирования с отношениями сигнал-шум 40, 42, 44, 46, 48 и 50 дБ.

Рисунок 4.3 – Результаты моделирования (2)
АВГН = 40, 42, 44, 46, 48,50
В модели цифровой системы связи с частотным детектором и с блоком АВГН изменим частотное рассогласование с одного постоянного сигнала на различные частотные рассогласования, так же как в пункте 3 (рисунок 4.4). Аналогично предыдущему исследованию рассмотрим выходной сигнал при отношении сигнал-шум в 10, 20, 30, 40, 50 и 60 дБ (рисунок 4.5).
Аналогично предыдущему исследованию при отношении сигнал-шум в 50 и менее дБ дискриминатор Витерби не может определить частотное рассогласование, а при 50 и более дБ отклонение от реального частотного рассогласования становится меньше. Проверим зависимость изменений на меньших числах, а именно 50, 52, 54, 56, 58 и 60 дБ (рисунок 4.6).

Рисунок 4.4 – Модель цифровой системы связи с частотным детектором с различными шумами и частотным рассогласованием

Рисунок 4.5 – Результаты моделирования (3) АВГН = 10, 20, 30, 40, 50, 60.

Рисунок 4.6 – Результаты моделирования (4)
АВГН = 40, 42, 44, 46, 48,50
Вывод
В ходе лабораторной работы была исследована модель цифровой системы связи с частотным детектором. В качестве частотного детектора использовался дискриминатор Витерби.
В идеальных условиях (в отсутствии посторонних шумов) модель работает корректно.
После добавления шума АВГН с отношением сигнал-шум до 56 дБ в модель с постоянным частотным рассогласованием существует проблема с определением значения частотного рассогласования. При отношении сигнал-шум больше, чем 58 дБ данная задача становится реальной.