

ФЕДЕРАЛЬНОЕ
АГЕНТСТВО ЖЕЛЕЗНОДРОЖНОГО ТРАНСПОРТА
Красноярский институт железнодорожного транспорта - филиал
Федерального государственного бюджетного образовательного учреждения
высшего профессионального образования
«ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Факультет Транспортные системы
Кафедра Системы обеспечения движения поездов
Курсовой проект
дисциплина Теория автоматического управления
«Проектирование и расчет системы автоматического регулирования»
Выполнил: студент Калуш Д.А.
Группа: СОД 2-11-1
Принял преподаватель Патюков В. Г.
Красноярск 2013
Содержание
1. Расчётная схема САР…………………………………………………………………….3
Технические требования к разрабатываемой системе..…………………………………..3
2. Разработка структурной схемы САР ………………..………………………………….4
3. Статический расчёт системы……………………………………………………….……4
4. Исследование устойчивости системы ………………..………………………………...5
5. Построение логарифмических частотных характеристик ……………….………..…...7
6. Построение желаемой логарифмической амплитудно-частотной характеристики......8
7. Выбор и расчет корректирующих звеньев ………………………...…………………...10
Список
используемой литературы………………………………………………………....12
1. Расчётная схема сар
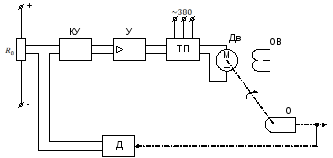
Рисунок 1 – Упрощённая схема системы
О – объект регулирования;
Дв – двигатель;
ТП – тиристорный преобразователь;
У – усилитель;
Д – датчик;
КУ – корректирующее устройство.
Технические требования к разрабатываемой системе:
-
Мощность двигателя Pн = 6,2 кВт;
-
Ток якоря номинальный Iн = 32 А;
-
Скорость вращения двигателя номинальная nн = 1000 об/мин;
-
Сопротивление якорной цепи двигателя Rяц = 0,8 Ом;
-
Индуктивность якорной цепи двигателя Lяц = 0,025 Гн;
-
Момент инерции системы электропривода, приведённый к якорю двигателя J = 0,32 кг∙м2;
-
Постоянная времени объекта управления T0 = 1,632 с;
-
Диапазон регулирования скоростей D = 6:1;
-
Статическая ошибка регулирования выходного параметра δ = 2,5 %;
-
Допускаемое перерегулирование Ϭ = 20 %;
-
Время регулирования tр = 3 с;
-
Напряжение якоря двигателя номинальное Uн = 220 В;
-
Произведение коэффициентов передачи объекта и датчика k0∙kД = 0,1 В∙с/рад;
-
Коэффициент передачи тиристорного преобразователя kтп = 30 А/В;
-
Электромеханическая постоянная времени двигателя Tэм = 0,058 с.

2. Разработка структурной схемы сар.
Номинальная скорость вращения двигателя:
Ωн =
 .
.
Коэффициент передачи электродвигателя:
kдв =
 .
.
Электромагнитная постоянная якорной цепи двигателя:
Тяц =

Электромеханическая постоянная времени двигателя:

Найденные значения
Тяц
и Tэм
сравниваются.
 ,
значит электродвигатель представляет
собой колебательное
звено с
передаточной функцией:
,
значит электродвигатель представляет
собой колебательное
звено с
передаточной функцией:

подставляем численные значения:

Передаточная
функция объекта:
На основании
полученных передаточных функций строим
структурную схему САР. При
 эта схема имеет вид:
эта схема имеет вид:

Рисунок 1 – Структурная схема САР